本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

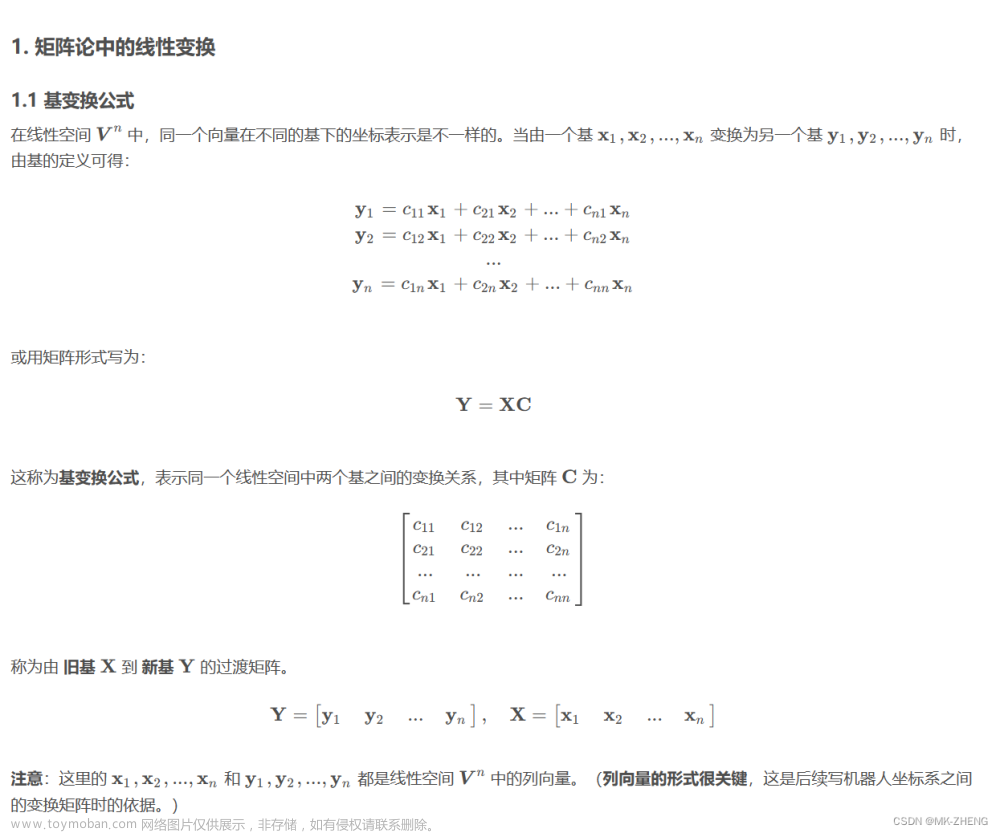
动手学姿态的多种表示
上一节小鱼带你一起学习了四种姿态表示方式,这节课我们就利用相关的开源库,来完成姿态的不同表示方式之间的转换。
包含12中转换形式,其中一些转换的计算方式,前面几节课中小鱼有给出相应的公式。
四元数模块:quaternions
- 四元数 转 旋转矩阵
- 旋转矩阵 转 四元数
- 四元数 转 轴角
- 轴角 转 四元数
欧拉模块:euler
- 欧拉角 转 四元数
- 四元数 转 欧拉角
- 欧拉角 转 旋转矩阵
- 旋转矩阵 转 欧拉角
- 欧拉角 转 轴角
- 轴角 转欧拉角
轴角模块:axangles
- 轴角 转 旋转矩阵
- 旋转矩阵 转 轴角
本节主要推荐的是Python的相关实现,用的是小鱼常用的transforms3d库,该库的api设计非常的巴适,小鱼是非常的爱~
1.安装
安装使用pip即可
pip install transforms3d -i https://pypi.tuna.tsinghua.edu.cn/simple
2.四元数相关转换
四元数模块在transforms3d.quaternions里,直接导入即可使用
2.1 四元数与旋转矩阵互转
import transforms3d as tfs
import numpy as np
# 四元数转旋转矩阵
tfs.quaternions.quat2mat([1,0,0,0])
# 旋转矩阵转四元数
tfs.quaternions.mat2quat(np.asarray([[1., 0., 0.],[0., 1., 0.],[0., 0., 1.]]))
2.2 四元数与轴角互转
import transforms3d as tfs
import numpy as np
# 四元数转旋轴角
tfs.quaternions.quat2axangle([1,0,0,0])
# 轴角转四元数
tfs.quaternions.axangle2quat([1,0,0],0.5)
3.欧拉角相关转换
四元数模块在transforms3d.euler里,直接导入即可使用
3.1 欧拉角与四元数互转
import transforms3d as tfs
import numpy as np
# 固定轴欧拉角转四元数
tfs.euler.euler2quat(0,0,0,"sxyz")
# 四元数转固定轴欧拉角
tfs.euler.quat2euler([1,0,0,0],"sxyz")
3.2 欧拉角与旋转矩阵互转
import transforms3d as tfs
import numpy as np
# 固定轴欧拉角转旋转矩阵
tfs.euler.euler2mat(0,0,0,"sxyz")
# 旋转矩阵转固定轴欧拉角
tfs.euler.mat2euler(np.asarray([[1., 0., 0.],[0., 1., 0.],[0., 0., 1.]]),"sxyz")
3.3 欧拉角与轴角互转
import transforms3d as tfs
import numpy as np
# 固定轴欧拉角轴角
tfs.euler.euler2axangle(0,0,0,"sxyz")
# 轴角转固定轴欧拉角
tfs.euler.axangle2euler([1,0,0],0.5,"sxyz")
4.轴角相关转换
四元数模块在transforms3d.axangle里,直接导入即可使用
4.1 轴角与旋转矩阵互转
import transforms3d as tfs
import numpy as np
# 轴角转旋转矩阵
tfs.axangles.axangle2mat([1,0,0],0.5)
# 旋转矩阵转轴角
tfs.axangles.mat2axangle(np.asarray([[1., 0., 0.],[0., 1., 0.],[0., 0., 1.]]))
5.C++实现Eigen
开源地址,欢迎一起加入完善: https://gitee.com/ohhuo/transforms3d_cpp

参考文档:
- http://matthew-brett.github.io/transforms3d/
技术交流&&问题求助:
-
微信公众号及交流群:鱼香ROS
-
小鱼微信:AiIotRobot
-
QQ交流群:139707339
-
版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划文章来源:https://www.toymoban.com/news/detail-430575.html
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小鱼,一起交流技术,学习机器人文章来源地址https://www.toymoban.com/news/detail-430575.html
到了这里,关于《动手学机器人学》7.2.4姿态之间的互相转换,Python&&C++支持四元数,欧拉角旋转矩阵、轴角的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!