一、参考文章
最近在项目中,需要通过笛卡尔空间已知点的位置求解机器人关节空间的状态,最终选择最优方式到达目标点。实验室正好有ABB机器人,型号为IRB 1600-6/1.45。
方法步骤:
1、获取机器人DH参数
2、fk、ik代码
3、robotstudio验证
abb dh参数获取:
dh参数1
dh参数2
参考视频:哔哩哔哩,强烈推荐
台大机器人运动学
fk-ik计算推导参考:
fk-ik2
fk_ik2
二、改进DH参数获取
在上文链接中,按照链接1、2所述,获取到的DH参数应为MDH,其获取结果如下图所示,但是通过最终验证,只有欧拉角计算正确,空间位置并不正确。
后续通过其他途径获取相关改进DH参数,见下述内容,如有需要,见私信。
三、fk推导
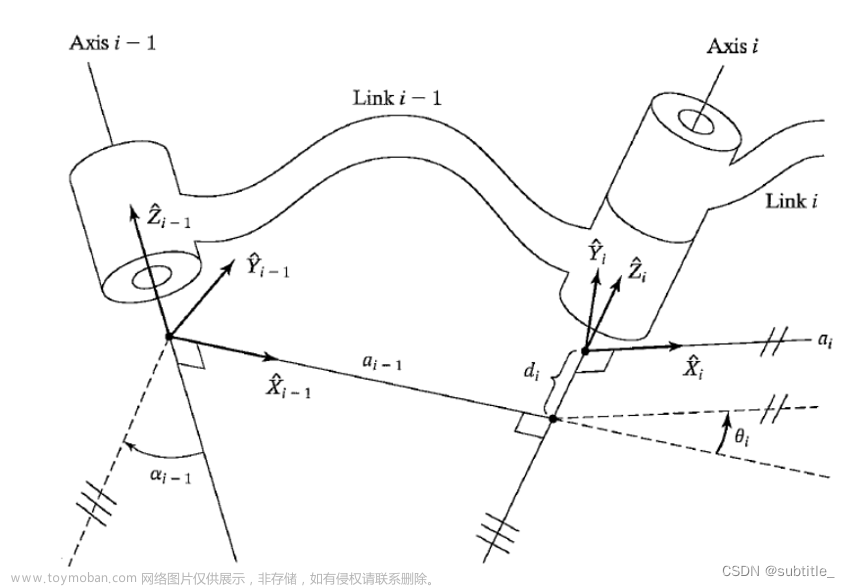
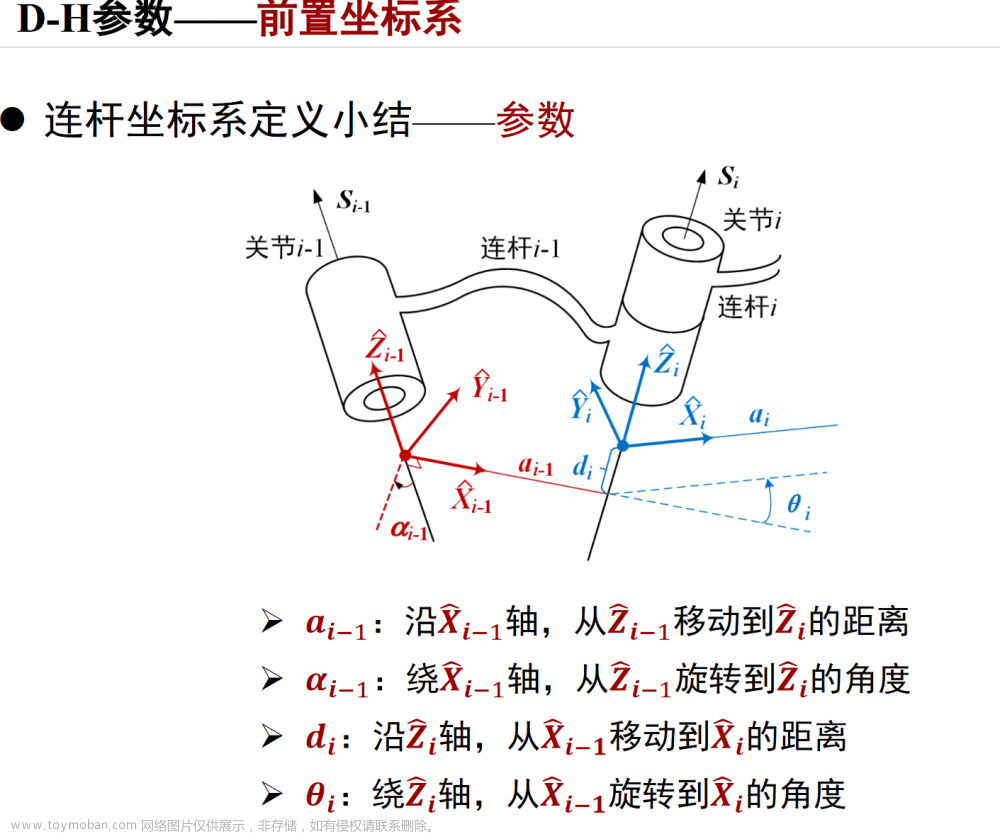
根据上述链接,建立相关坐标系,建立过程如下图所示;
以课程中示例所示,第i-1与第i杆之间坐标经历α(i-1),a(i-1),θ(i),d(i)。该方法为改进DH参数。其中:
α(i-1) 表示第i-1坐标系z轴经旋转后与第i坐标系z轴平行,逆时针为正;
a(i-1) 表示经过上述操作后的第i-1坐标系z轴与第i坐标系z轴异面直线距离;
θ(i)表示经过上述操作后的第i-1坐标系x轴经旋转后与第i坐标系x轴平行;
d(i) 表示经过上述操作后的i-1坐标系与第i坐标系之间偏移距离。
注意初始坐标系与末尾坐标系中参数,具体见推荐课程。
参考fk-ik2链接中图片,对ABB六轴机器人建立对应的坐标系,轻易可得:

可得ABB中对应的MDH为,具体型号见技术参数:
最终变换公式如下图所示,T的左上角为以哪一个坐标系作为基准。将上表中数带入下图公式,最终可以得到机器人正解。
最终,将变换矩阵转换为XYZABC格式,只需将旋转矩阵转换为欧拉角即可。
四、ik推导
针对ik推导,具体推导公式不详细列出,最终结果存在多解,为下图所示;

懒得写了,抽时间再写,依据上述链接中计算后续的theta。
五、测试验证
打开robotstudio,建立机器人工程,打开虚拟示教器,随意设定一个位姿,分别记录笛卡尔空间坐标与关节空间状态,如下图所示,分别进行fk ik计算。
最终得到位姿如下图所示:
可以看出fk、ik计算正确,为了验证其他关节状态是否正确,分别移动虚拟示教器,让关节状态满足其余七个状态,记录笛卡尔坐标。
关节空间验证
大概位姿,非准确,只是测试是否准确:
第2组、

第3组、第4组中第五轴超出量程范围;
第5组:

第6组

第7组、第8组中二轴的超出量程范围;文章来源:https://www.toymoban.com/news/detail-431335.html
综上,可以验证abb机器人正解及逆解的正确性;文章来源地址https://www.toymoban.com/news/detail-431335.html
附录-代码部分
#include <iostream>
#include <cmath>
#include <vector>
#include <Eigen/core>
#include <cmath>
using namespace std;
const double pi = 3.14159265397932384626433;
//MDH参数
vector<double> joints_alpha = { 0, -90, 0, 90, -90, 90 };
vector<double> joints_a = { 0, a1, -a2, -0, 0, 0 };
vector<double> joints_d = { d1, 0, 0, d4, 0, d6 };
vector<double> joints_theta = { 0, 90, 0, 0, 0, 0 };
//MDH参数-矩阵
Eigen::Matrix4d dh_matrix(double alpha, double a, double d, double theta);
//旋转矩阵转换为欧拉角
vector<double> computeEularAngles(Eigen::Matrix4d & R, bool israd);
//欧拉角转换为旋转矩阵 xyzabc
Eigen::Matrix4d computeTrans(vector<double> pos);
//fk计算
vector<double> fk_robot(vector<double>joints_alpha, vector<double> joints_a, vector<double> joints_d, vector<double> joints_theta);
//ik计算
vector<vector<double>> ik_robot(Eigen::Matrix4d trans);
int main()
{
vector<double> temp_theta = { 20.24,14.44,24.48,-22.07,26.14,-84.27 };//关节空间表示
vector<double> pos = { 773.17,273.55,730.15,-60.93,-14.71,-155.71 };//笛卡尔空间表示
//fk
vector<double> theta1;
for (int i = 0; i < joints_theta.size(); i++)
{
theta1.push_back(joints_theta[i]+ temp_theta[i]);
}
auto rst = fk_robot(joints_alpha, joints_a, joints_d, theta1);
cout << "笛卡尔空间表示:\n"<<"x: "<<rst[0] << "\ty: " << rst[1] << "\tz:" << rst[2] << "\tA: " << rst[3] << "\tB: " << rst[4] << "\tC: " << rst[5] << endl;
//ik计算
auto test = computeTrans(pos);
auto joint=ik_robot(test);
cout << "关节空间表示:" << endl;
for (int i = 0; i < joint.size(); i++)
{
for (int j = 0; j < joint[i].size(); j++) cout << "theta"+ to_string(j)+": "<<joint[i][j] << "\t";
cout << "\n";
}
system("pause");
return 0;
}
到了这里,关于IRB 1600-6/1.45 ABB 改进DH参数计算正解逆解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!