前言:
目前主要的测距方式有:光学测距,超声波和微波雷达测距。
光学测距又可以分为:双目,结构光,ToF。微波雷达,在消费类产品中,常见的是波长在毫米级别的毫米波雷达。超声波应用比较多的是在车载倒车雷达上。
它们各有优缺点,本章内容只针对在户外低功耗场景的应用做分析。
(一)需求分析
市场需求
- 户外场景(比如路边,路面或是公园)
- 低功耗产品,最短半年换一次电池
- 探测近距离范围内的车辆,动物等
- 全国范围内可以使用
市面上已有的类似方案:视频桩,路牙机
需求分析
对市场需求进行进一步分析,可以梳理出下面几个比较具体的产品需求:
- 光照强度范围:0.2lx ~ 10万lx (月光级~太阳直射)
- 气候条件:雨天,雾霾,以及少量尘埃覆盖条件下均可使用
- 温度范围:-40~80°C
- 环境干扰: 存在路边花草覆盖,垃圾遮挡,震动,无线等干扰情况
- 功耗要求:1Hz 检测周期下,平均功耗低于5mW/s
(二)光学测距
光学测距类型
光学测距,主要有双目,结构光和ToF三个技术方向。
结构光和双目都属于3D视觉技术,不但可以检测出距离,还可以输出速度,形状等信息。
ToF模块也有3D的,但如果只要检测距离,不用测量速度和判断物体形状,1D ToF就可以满足需求了。
ToF基本原理
ToF测距基本原理: ToF模块发射端将调制后的红外光发送出去,接收端接收到反射回来的光,通过发送与反射回来光束的时间差或是相位差得到光飞行的时间。根据光的传播速度,结合检测到的飞行时间,可以计算出光传播的距离,从而知道模块距离被测试物体的距离。
ToF 细分之下,又分两种类型,iToF 和 dToF
iToF 原理
将调制后的光发送出去,接收端接收到后,解析出接收到光束的相位,将它与发送时的相位进行对比,间接计算出光的传播时间,从而得到距离值。
TI 的 OPT3101 采用的就是iToF方式。


dToF 原理:
相比于 iToF 通过相位间接得到飞行时间,dToF 是通过发送时刻与接收时刻的时间差直接得到飞行时间,汐映微 用在扫地机器人上的CS10-S2A 就是使用的dToF技术。系统框图如下:

优点:
- 模块结构较小
- 探测角度较小
- 功耗小
缺点:
- 适用温度范围小(-10~60°C)
- 需要保持模块表面清洁
- 对光的干扰敏感
适用场景
-
适用于冬季温度在-20°C以上地区,因为低温环境下,
ToF模块的时钟精度会下降,导致测量距离不准。另外光学器件灵敏度下降,会导致一些非线性的错误结果,还有可能出现启动不了的情况。 -
适用于安装在距离地面比较高的位置,并且模块上方有遮雨的结构设计。镜头有水,或者是镜头沾污,会影响模块性能。
-
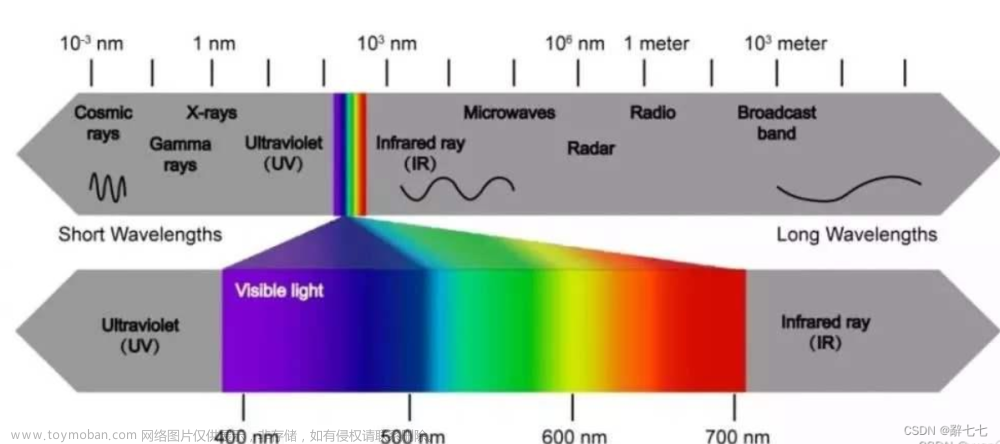
适用于没有阳光直射或是其它光干扰环境。目前使用比较多的ToF模块,激光波长在800~950nm 的范围。太阳光直射,容易导致感光元器件过曝。如果有波长为800~950nm的其它光源,比如车灯,路灯,会对模块造成干扰。
(三)超声波测距
超声波测距,目前应用得最多的是在倒车雷达上,在近距离测距上使用非常多。一般人能听到的声波频率范围是20Hz~20Khz,低于20hz的我们叫次声波,高于20Khz,我们叫超声波。
测距原理
超声波测距的基本原理是:将固定频率的声波发射出去,然后再检测是否有该频率的声波被反射回来,通过计算发送和接收的时间,可以知道声波的传输时间,再乘以声波的速度,就可以得到距离。
目前成熟度比较高的是 elmos 的 E524.09/08

优点
- 对环境光不敏感
- 雨天雾天或是表面有灰尘不影响使用
- 温度范围广(-40~80°C)
缺点
- 准确度与探测物表面材质关系大
- 对湿度、风力和气压敏感
- 难以达到较小的探测角度
- 功耗较大
- 相应速度较慢
适用场景
- 适用于探测硬度较大物体。超声波属于机械波,如果被探测物表面非常软,如海绵,会导致声波被吸收,影响探测结果
- 适用于探测范围比较大的场景。声波是呈圆锥形发射,它的探测范围会比较大,一般探头的角度为40 * 80,或者是30 * 60;
- 适用于震动较小场景。由于近距离测距的超声波模块,一般使用的是52KHz,或是58Khz,如果周围有噪音,或是有处于同频率的震动,会影响到检测结果。
- 适用于-40°C ~ 80°C 的环境温度,基本上可以覆盖全国的户外场景。
- 不适用于实时性要求高的场景。声波在空气中的传播速度是340m/s,其检测速度没有光学测距快。
(四)微波雷达
微波雷达目前应用比较广的是汽车上的自适应巡航、前向碰撞、盲区监测、自动泊车等系统。它们的探测距离会比较远,可以到200米的距离,属于中距离和远距离探测器。
车载上使用的微波雷达,功耗很高,并不适用于普通消费级的低功耗设备上。
目前在普通消费级设备上,使用比较多的是频率在24GHz的毫米波雷达,比如汐杰微的RKB1125FD 模块,它在1Hz 检测周期下,平均功耗可以做到3.5mW/s
测距原理
测距原理和方式,跟ToF模块相类似,分为两种:一种是通过相位间接得到时间(调频式连续毫米波雷达),一种是直接得到时间(脉冲式毫米波雷达),目前使用的基本上是调频式连续毫米波雷达。

优点
- 雨雾天气不影响使用
- 功耗较低
- 抗干扰能力强
- 温度范围较大(-30~80°C)
缺点
- 天线角度较大
- 距离精确度不是很高
适用场景
- 适用于模块结构比较大的设备。在微波雷达中,尺寸最大的部分是微波雷达的天线,天线尺寸与探测角度是成反比,如果要小角度探测范围,那么天线的尺寸会相应的变大。
- 适用温度范围较大,比ToF范围广,但比不上超声波。
- 适用于响应速度较快场景,其速度接近ToF模块,远高于超声波。
- 适用于准确度要求不太高的场景。就目前有测试到的模块,在近距离应用环境中,它的准确度并不这么高。
- 适用于低功耗场景。它与超声波相比,在同样使用条件下,功耗可以低2倍左右。
总结
回到文章最开始市场的需求,就目前已经已接触到的模块,并没有哪种类型模块可以满足全部的需求。激光,超声波,毫米波它们都有适合的应用场景,同时也都有各种局限性。
我们需要根据自己的实际使用场景选择合适的模块,也可以多种探测器组合使用。文章来源:https://www.toymoban.com/news/detail-431625.html
在市场的驱动下,也许在不久的将来,会有新的技术出来,能够解决上面所有应用场景的限制。文章来源地址https://www.toymoban.com/news/detail-431625.html

到了这里,关于超声波、毫米波、ToF激光雷达——在低功耗场景的应用选型的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!