前言
在某些具体情况下,如通过电话线传输信息时,由于在电话线上只能传输模拟信号,因此需要将数字信号转换为模拟信号,进而将转换后的模拟信号进行传输。数据接收端对模拟信号进行采样,量化,编码后,还原出数字信号。
在上述过程中,数据发送端将数字信号转换为模拟信号的过程叫做调制,数据接收端将模拟信号转为数字信号的过程叫做解调。
一、调制解调概念
数字信号调制的方法有很多,根据不同原理,有2FSK(二进制频率调制)、2PSK(二进制相移键控)、2ASK(二进制振幅键控)等等。但不管哪种方法,都建立了一种二进制信息与模拟信息之间的关系,当然不同的调制方法其对频带的利用率也有所不同。
本篇主要进行基于2FSK的二进制信号调制的实验。
1.2FSK原理
2FSK是通过所要传输的数字信息控制载波的频率。如图1.0所示,现有两种不同频率的载波f1与f2,在数据发送端对输入信号进行调制时,根据当前所需要发送的数据Din,选择不同的载波,可以定义为 当 din=0b时,dout端口输出载波f1,当din=1b时,dout端口输出载波f2,则在dout端口输出的波形可以如图1.1中所示 图1.0 2FSK硬件原理简图
图1.0 2FSK硬件原理简图
图1.1 2FSK波形图
上述为调制部分,解调部分其实就是调制部分的逆过程,通过接收模拟信号,然后转换为数字量,进而计算信号的频率,然后对应还原基带信号。
二、硬件设计
1.调制器设计思路
根据其原理,在设计调制器时,需要一个产生载波的模块,该模块需要能够产生两个不同频率的sin波形;其次需要一个移位寄存器作为数据的发送缓冲区;其大致结构如图2.0所示。 
图2.0 2FSK调制器结构
这里需要注意的是,为了保证每个传输数据都能有一个完整周期的载波表示,移位寄存器的时钟分频应当是载波f1与f2分频的整数倍乘积。
2.解调器设计思路
解调器实际上是一个频率计,频率计实时计算输入信号的频率,在通过一个频率的阈值比较器,判断输出的数字信号为1或0。
这里由于考虑到模拟信号在传输过程中可能引入的干扰信号,为了不使通信出错,所以在频率计输入前再增加一个施密特触发器。其结构如图2.1所示。
图2.1 2FSK解调器结构
施密特触发器将输入模拟信号转换为边沿脉冲信号,然后通过频率计计算频率,最终转换为数字信号输出。
三、代码
1.顶层
module FSK_2#(
parameter integer CLOCK_DIV = 80
)(
input fsk_clk,
input de_fsk_clk,//解调时钟
input fsk_en,
input fsk_rst,
input [7:0] din,
input [7:0] dqvld,//数据有效信号
output do,
output deo,
output [7:0] dout,
output [15:0] fre_o,
output reg send_qvld,//发送完成信号
output reg sbusy //繁忙标志位
);
localparam IDLE0 = 4'd0;
localparam IDLE1 = 4'd1;
localparam SEND = 4'd2;
localparam FINISH = 4'd3;
wire [7:0] f1_out;
wire [7:0] f2_out;
reg [7:0] send_buff;//发送数据缓冲区
reg [15:0] div_cnt;
wire send_clk;//数据发送时钟
assign send_clk = div_cnt < ((CLOCK_DIV>>1)-1) ? 1'b1:1'b0;
//分频
always@(posedge fsk_clk,posedge fsk_rst)
begin
if(fsk_rst)
begin
div_cnt <= 16'd0;
end
else
begin
if(fsk_en)
begin
if(div_cnt != CLOCK_DIV-1)
div_cnt <= div_cnt + 16'd1;
else
div_cnt <= 16'd0;
end
else
begin div_cnt <= div_cnt;end
end
end
//数据发送状态机
reg [3:0] send_state;//发送数据缓冲区
reg [3:0] bit_cnt;
assign do = send_buff[0];
assign dout = do ? f1_out:f2_out;
always @ (posedge send_clk,posedge fsk_rst)
begin
if(fsk_rst)
begin
send_buff <= 8'd0;
send_state <= 8'd0;
send_qvld <= 1'b0;
sbusy <= 1'b0;
bit_cnt <= 4'd0;
end
else
begin
if(fsk_en)
begin
case(send_state)
IDLE0:begin//空闲
sbusy <= 1'b0;
bit_cnt <= 4'd0;
if(dqvld)
begin
send_buff <= din;
send_state <= IDLE1;
end
else
begin
send_state <= IDLE0;
end
end
IDLE1:begin//等待qvld撤销
sbusy <= 1'b1;
if(dqvld)
begin
send_state <= IDLE1;
end
else
begin
send_state <= SEND;
end
end
SEND:begin
if(bit_cnt != 4'd8)
begin
send_buff <= send_buff >> 1;
bit_cnt <= bit_cnt + 4'd1;
end
else
begin send_state <= FINISH; end
end
FINISH:begin
send_qvld <= 1'b1;
send_state <= IDLE0;
end
endcase
end
else
begin send_buff<=send_buff;send_state<=send_state; bit_cnt <= bit_cnt;send_qvld <= 1'b0; end
end
end
F1 F1_inist0(
. f1_clk(fsk_clk),
. f1_en(fsk_en),
. f1_rst(fsk_rst),
. dout(f1_out)
);
F2 F2_inist0(
. f2_clk(fsk_clk),
. f2_en(fsk_en),
. f2_rst(fsk_rst),
. dout(f2_out)
);
assign deo = fre_o >= 34? 1'b1:1'b0;
cymo #(
.SCH_thread0(130)
)cymo_inist0(
. cy_clk(de_fsk_clk),
. din(dout),
. cy_en(fsk_en),
. cy_rst(fsk_rst),
. fre_o(fre_o)
);
endmodule
在顶层模块中除了例化了f1与f2两个载波的发生模块和频率计模块外,还通过两个always块实现了移位寄存器和FSK的状态控制。
在信号接口中,do为调制器需要调制的基带信号,deo为最终的解调信号。
2.F1载波发生模块
//10点采样sin波形
module F1(
input f1_clk,
input f1_en,
input f1_rst,
output reg [7:0] dout
);
parameter integer sin0 = 128;
parameter integer sin1 = 203;
parameter integer sin2 = 250;
parameter integer sin3 = 250;
parameter integer sin4 = 203;
parameter integer sin5 = 128;
parameter integer sin6 = 52;
parameter integer sin7 = 6;
parameter integer sin8 = 6;
parameter integer sin9 = 52;
reg [3:0] f1_state;
always @ (posedge f1_clk,posedge f1_rst)
begin
if(f1_rst)
begin
f1_state <= 4'd0;
end
else
begin
if(f1_en)
begin
if(f1_state != 4'd9)
begin
f1_state <= f1_state+4'd1;
end
else
begin f1_state <= 4'd0; end
end
else
begin
f1_state <= f1_state;
end
end
end
always @ (posedge f1_clk,posedge f1_rst)
begin
if(f1_rst)
begin
f1_state <= 4'd0;
dout <= sin0;
end
else
begin
if(f1_en)
begin
case(f1_state)
4'd0:begin dout <= sin0; end
4'd1:begin dout <= sin1; end
4'd2:begin dout <= sin2; end
4'd3:begin dout <= sin3; end
4'd4:begin dout <= sin4; end
4'd5:begin dout <= sin5; end
4'd6:begin dout <= sin6; end
4'd7:begin dout <= sin7; end
4'd8:begin dout <= sin8; end
4'd9:begin dout <= sin9; end
default:begin dout<=sin0; end
endcase
end
else
begin dout<=dout; end
end
end
endmodule
载波可以通过cordic IP核计算发出,这里为了方便,选择了查表法。f1载波是10点采样的sin波形。
3.F2载波发生模块
//8点采样sin波形
module F2(
input f2_clk,
input f2_en,
input f2_rst,
output reg [7:0] dout
);
parameter integer sin0 = 128;
parameter integer sin1 = 218;
parameter integer sin2 = 255;
parameter integer sin3 = 218;
parameter integer sin4 = 128;
parameter integer sin5 = 37;
parameter integer sin6 = 0;
parameter integer sin7 = 37;
reg [3:0] f2_state;
always @ (posedge f2_clk,posedge f2_rst)
begin
if(f2_rst)
begin
f2_state <= 4'd0;
end
else
begin
if(f2_en)
begin
if(f2_state != 4'd7)
begin
f2_state <= f2_state+4'd1;
end
else
begin f2_state <= 4'd0; end
end
else
begin
f2_state <= f2_state;
end
end
end
always @ (posedge f2_clk,posedge f2_rst)
begin
if(f2_rst)
begin
f2_state <= 4'd0;
dout <= sin0;
end
else
begin
if(f2_en)
begin
case(f2_state)
4'd0:begin dout <= sin0; end
4'd1:begin dout <= sin1; end
4'd2:begin dout <= sin2; end
4'd3:begin dout <= sin3; end
4'd4:begin dout <= sin4; end
4'd5:begin dout <= sin5; end
4'd6:begin dout <= sin6; end
4'd7:begin dout <= sin7; end
default:begin dout<=sin0; end
endcase
end
else
begin dout<=dout; end
end
end
endmodule
f2同样采用查表法,是8点采样的sin波形。
假设现在f1与f2模块的输入时钟为10Mhz,则不难得出,f1频率为10Mhz/10 = 1Mhz ,f2频率为 10Mhz/8 = 1.125Mhz。
4.频率计模块
module cymo#(
parameter integer SCH_thread0 = 150
)(
input cy_clk,
input [7:0] din,
input cy_en,
input cy_rst,
output reg [15:0] fre_o
);
localparam SCH_thread1 = (SCH_thread0<<1)/3;
reg [3:0] cy_state;
reg [15:0] cy_cnt;
always@(posedge cy_clk,posedge cy_rst)
begin
if(cy_rst)
begin
cy_cnt<=16'd0;
cy_state <= 4'd0;
end
else
begin
if(cy_en)
begin
case(cy_state)
4'd0:begin
if(din>=SCH_thread0)
begin
cy_state<=cy_state+4'd1;cy_cnt<=32'd0;//大于开始计时
end
else
begin
cy_state<=cy_state;
end
end
4'd1:begin
cy_cnt<=cy_cnt+32'd1;//定时器加
if(din<=SCH_thread1)
cy_state<=cy_state+4'd1;//大于开始计时
else
cy_state<=cy_state;
end
4'd2:begin
if(din>=SCH_thread0)
begin
cy_state<=4'd0;//大于开始计时
fre_o<=cy_cnt;
end
else
cy_cnt<=cy_cnt+32'd1;//定时器加
end
endcase
end
else
begin
cy_state <= cy_state;
cy_cnt <= 16'd0;
end
end
end
endmodule
在频率计模块中,SCH_thread0为施密特触发器的阈值1,阈值2为SCH_thread0的三分之一。
5.测试文件
`timescale 1ps / 1ps
module FSK_tb(
);
reg clk;
reg en;
reg rst;
reg de_fsk_clk;
wire[7:0]dout;
wire[15:0]fre_o;
wire deo;
reg [7:0] din;
reg dqvld;//数据有效信号
wire do;
wire send_qvld;//发送完成信号
wire sbusy;//繁忙标志位
integer i;
initial begin
en = 0;
rst = 0;
#2 rst = 1;
#2 rst = 0;
en = 1;
i = 0;
#4 din = 8'b1011_0110;
while(i<50)
begin
while(sbusy == 1)
begin
#1 dqvld = 1'b0;
end
dqvld = 1'b1;
while(sbusy == 0)
begin
#1 dqvld = 1'b1;
end
dqvld = 1'b0;
din = din + 1;
i = i + 1;
end
end
initial begin
de_fsk_clk = 0;
forever begin
#1 de_fsk_clk = ~de_fsk_clk;
end
end
initial begin
clk = 0;
forever begin
#4 clk = ~clk;
end
end
FSK_2#(
. CLOCK_DIV (80)
)FSK_2_inist0(
. fsk_clk(clk),
. de_fsk_clk(de_fsk_clk),
. fsk_en(en),
. fsk_rst(rst),
. din(din),
. dqvld(dqvld),//数据有效信号
. do( do),
. deo(deo),
. fre_o(fre_o),
. dout( dout),
. send_qvld(send_qvld),//发送完成信号
. sbusy( sbusy) //繁忙标志位
);
endmodule
四、仿真结果
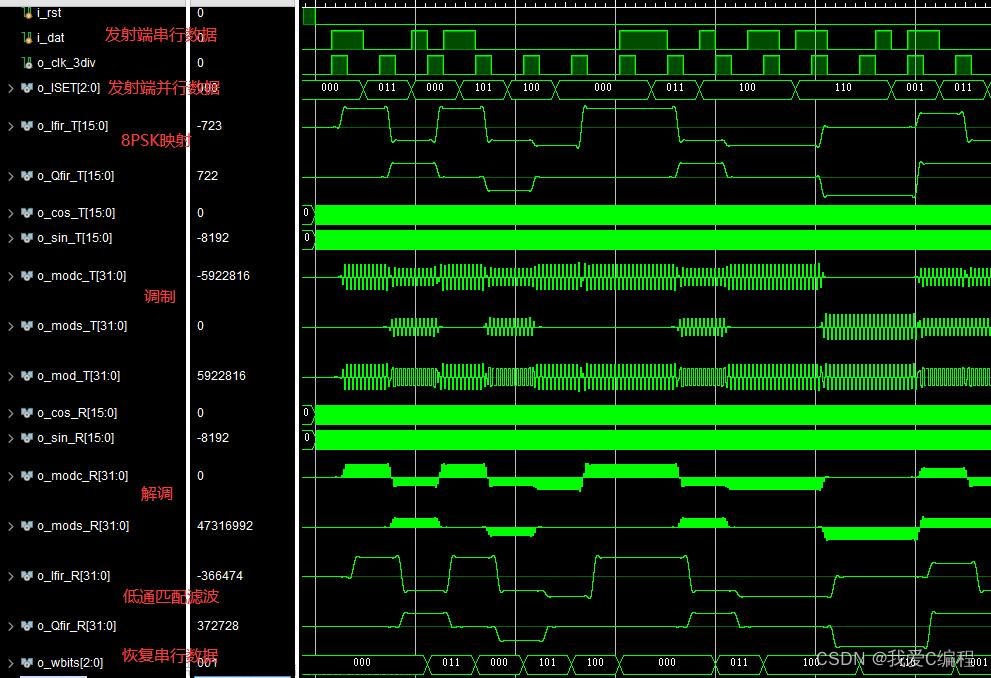
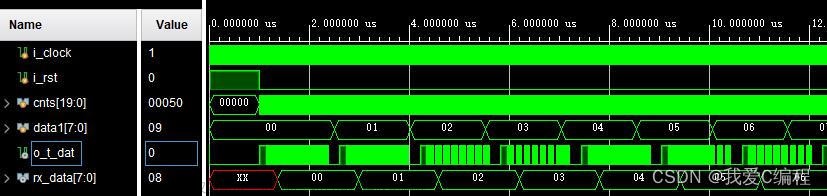
 din为输入的需要发送的8位数据,dout为调制器发出的模拟波形,fre_o为频率计输出的计数值,do为转换为串行数据流的基带信号,deo为解调器解调后的数据。
din为输入的需要发送的8位数据,dout为调制器发出的模拟波形,fre_o为频率计输出的计数值,do为转换为串行数据流的基带信号,deo为解调器解调后的数据。
基本实现了2FSK调制解调器的功能。 图4.1 模拟波形转换图文章来源:https://www.toymoban.com/news/detail-431881.html
图4.1 模拟波形转换图文章来源:https://www.toymoban.com/news/detail-431881.html
在图4.1中由于两个载波采样点数比较相近,频率相近,所以其波形比较相似,大家也可以通过增加采样点数的方式,改变其频率。文章来源地址https://www.toymoban.com/news/detail-431881.html
到了这里,关于基于verilog实现2FSK调制解调器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!