EDA工具:Modelsim and Vivado
##一、产品要求:
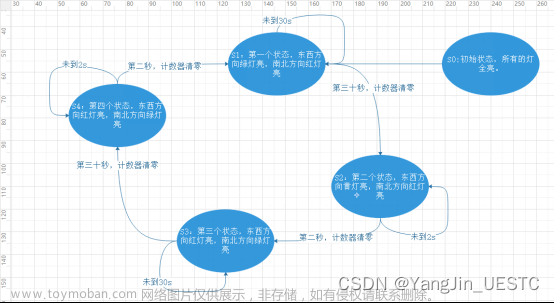
该控制器用于主干道和支道公路交叉口,优先保证主干道通行,平时处于"主干道绿灯,支道红灯"状态,支道有车辆要穿过主干道时,信号灯改为"主干道红灯,支道绿灯",支道无车辆时,信号灯返回"主干道绿灯,支道红灯"状态。如果支道始终有车,按普通信号灯处理。主干道和支道每次通行时间不得短于30s,两个状态交换之间有"主黄,支红"和"主红,支黄"的中间状态,持续时间均为4s。支道是否来车用开关代替,交通信号灯用LED代替。
##二、代码设计:
module traffic_ctrl(
input sys_clk,
input sys_rst_n,
input bypass_car,
output reg main_light,
output reg bypass_light
);
//wire sys_rst_n;
//assign sys_rst_n = 1'b1;
parameter S0 = 2'b00;
parameter S1 = 2'b01;
parameter S2 = 2'b11;
parameter S3 = 2'b10;
/**************************实际测试数据*********************************************************/
//parameter CLK_CNT = 32'B1100_1010_1010_0111_1110_0010_0000_0000;//68s
//parameter YELLOW_CNT = 25'B1_0111_1101_0111_1000_0100_0000;
/**************************缩小1000000倍后的用于仿真测试数据**************************************/
parameter CLK_CNT = 35'd3400;
parameter YELLOW_CNT = 25'd25;
reg [31:0]clk_cnt;
reg [24:0]yellow_cnt;
wire red;
reg yellow;
wire green;
assign red = 1'b1;
assign green = 1'b0;
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n||!bypass_car)
yellow_cnt <= 25'b0;
else if(yellow_cnt == YELLOW_CNT - 1)begin
yellow <= ~yellow;
yellow_cnt <= 25'b0;
end
else
yellow_cnt <= yellow_cnt + 1'b1;
end
//计数模块
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n||!bypass_car)
clk_cnt <= 32'b0;
else if(clk_cnt==CLK_CNT-1)
clk_cnt <= 32'b0;
else
clk_cnt <= clk_cnt + 1'b1;
end
reg [1:0]curr_st;
reg [1:0]next_st;
//状态机之一段
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n||!bypass_car)
curr_st = S0;
// else if((clk_cnt==(30*50_000_000-1))|| /*
// (clk_cnt==(34*50_000_000-1))|| 实际时间
// (clk_cnt==(64*50_000_000-1))||
// (clk_cnt==(68*50_000_000-1)) ) */
/**************************缩小1000000倍后的仿真测试**************************************/
else if((clk_cnt==(30*50_-1))||
(clk_cnt==(34*50_-1))||
(clk_cnt==(64*50_-1))||
(clk_cnt==(68*50_-1)) )
curr_st <= next_st;
else
curr_st <= curr_st;
end
//状态机之二段
always@(*)begin
case(curr_st)
S0 : next_st = S1;
S1 : next_st = S2;
S2 : next_st = S3;
S3 : next_st = S0;
default :;
endcase
end
//状态机之第三段
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
main_light <= green;
bypass_light <= red;
end
else begin
case(curr_st)
S0: begin
main_light <= green;
bypass_light <= red;
end
S1: begin
main_light <= yellow;
bypass_light <= red;
end
S2: begin
main_light <= red;
bypass_light <= green;
end
S3: begin
main_light <= green;
bypass_light <= yellow;
end
default:;
endcase
end
end
endmodule
##三、测试代码设计:
`timescale 1ns/1ps
module tb_traffic_light();
reg sys_clk;
reg sys_rst_n;
reg bypass_car;
wire main_light;
wire bypass_light;
initial begin
sys_clk = 1'b1;
sys_rst_n = 1'b0;
bypass_car = 1'b0;
end
initial begin
#20 sys_rst_n = 1'b1;
#1000 bypass_car = 1'b1;
end
always #10 sys_clk = ~sys_clk;
traffic_ctrl u_traffic_ctrl(
.sys_clk (sys_clk ) ,
.sys_rst_n (sys_rst_n ) ,
.bypass_car (bypass_car ) ,
.main_light ( main_light ) ,
.bypass_light ( bypass_light )
);
endmodule
##四、仿真测试结果
由于仿真工具的仿真时间的考虑,本次仿真是在缩小1000_000倍的前提下进行的仿真,入下(前提采用了两个led作为测试 灯亮表示红灯 灯灭表示绿灯 黄灯表示led灯闪烁 )
为什么黄灯会变成不定态(原因:可能因为led灯反转太快 导致的 在实际情况下不存在此情况如视频中演示)
在bypass_car=1(i.g. 旁路有车)前提下
一区:相隔30000ns后进行的
二区:相隔4000ns后进行的
三区:相隔30000ns后进行的
四区:相隔4000ns后进行的
五区:返回到主车道绿灯,旁车道红灯

##五、上板验证结果
Led1灯表示主干道 led3表示枝干道
 文章来源:https://www.toymoban.com/news/detail-432259.html
文章来源:https://www.toymoban.com/news/detail-432259.html
交通信号灯文章来源地址https://www.toymoban.com/news/detail-432259.html
到了这里,关于基于FPGA的交通灯设计与实现的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!