CubeMX配置STM32以驱动超声波模块(HC-SR04)
| 一、CubeMX配置STM32 |
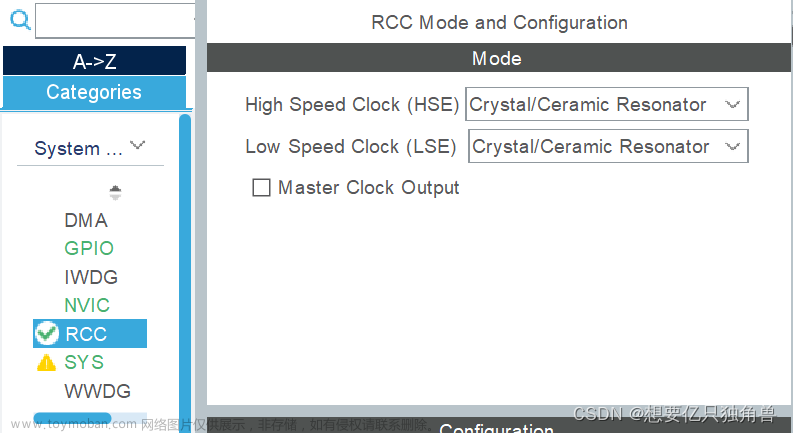
1、选择定时器
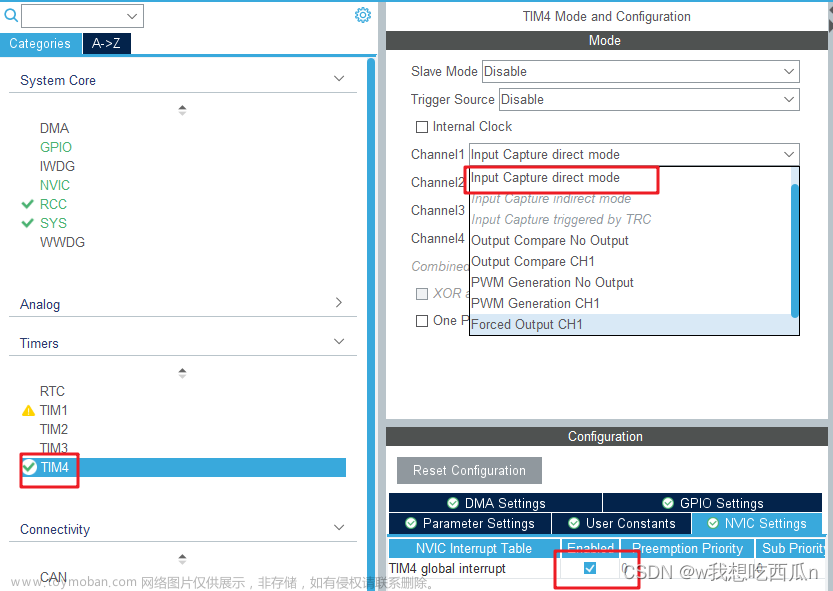
选择输入捕获模式
预分频设置为71,向上计数,自动重装值65535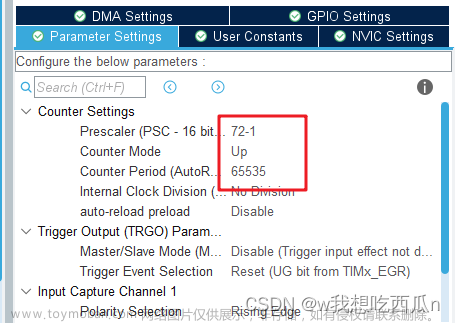
然后将名字改为ECHO
2、配置TRIG口
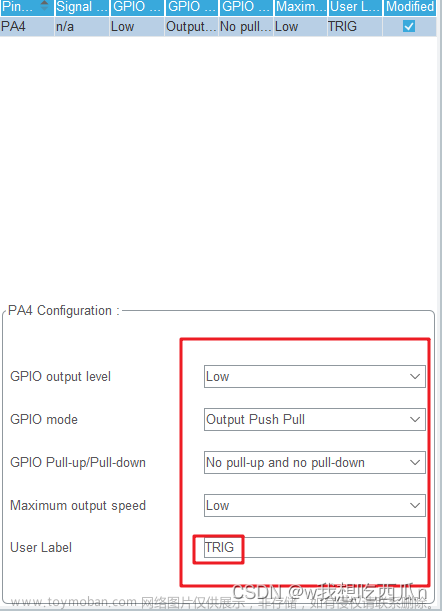
这里的端口使用其它空闲的IO口是可以的,设置为输出模式,其它配置不需要改变,最主要的是User Label那儿,需要设置为TRIG,因为驱动函数里面使用的是这个的宏定义,所以必须要改成这个名字才能直接使用驱动函数。
3、配置串口
因为要显示超声波测出的距离,我这里就直接使用串口助手显示了,有需要的话使用OLED、TFT之类的模块显示也可以。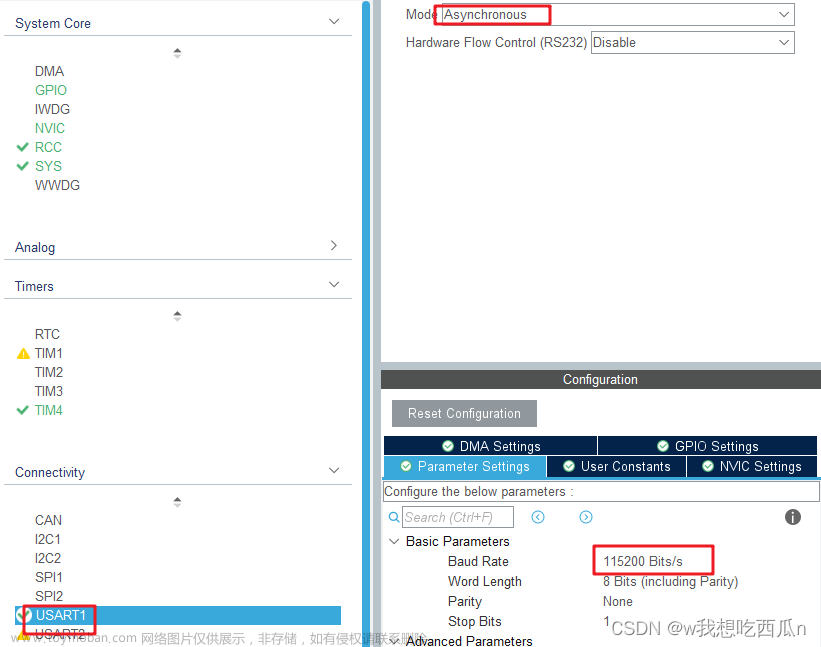
在这里如果需要使用printf函数的话,还需要在生成的usart.c里面添加fputc函数:
/*********************************************************
*
*重定义 fputc 函数
*
*********************************************************/
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit (&huart1 ,(uint8_t *)&ch,1,HAL_MAX_DELAY );
return ch;
}
在这之前记得引入头文件stdio.h、勾选Use MicroLIB
| 二、使用keil5进行进一步开发 |
1、引入HC-SR04的驱动文件
hc-sr04.c
/*
* @Author : yzy
* @Date : 2021-05-31 17:03:23
* @LastEditors : yzy
* @LastEditTime : 2021-06-21 22:16:28
* @Description :
* @FilePath : \CSDN_HC-SR04_GPIO\BSP_HARDWARE\HC-SR04\hc-sr04.c
*/
#include "hc-sr04.h"
Hcsr04InfoTypeDef Hcsr04Info;
/**
* @description: 超声波模块的输入捕获定时器通道初始化
* @param {TIM_HandleTypeDef} *htim
* @param {uint32_t} Channel
* @return {*}
*/
void Hcsr04Init(TIM_HandleTypeDef *htim, uint32_t Channel)
{
/*--------[ Configure The HCSR04 IC Timer Channel ] */
// MX_TIM2_Init(); // cubemx中配置
Hcsr04Info.prescaler = htim->Init.Prescaler; // 72-1
Hcsr04Info.period = htim->Init.Period; // 65535
Hcsr04Info.instance = htim->Instance;
if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_1)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_1; // TIM_CHANNEL_1
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_2)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_2; // TIM_CHANNEL_2
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_3)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_3; // TIM_CHANNEL_3
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_4)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_4; // TIM_CHANNEL_4
}
/*--------[ Start The ICU Channel ]-------*/
HAL_TIM_Base_Start_IT(htim);
HAL_TIM_IC_Start_IT(htim, Channel);//开启中断
}
/**
* @description: HC-SR04触发
* @param {*}
* @return {*}
*/
void Hcsr04Start(void)
{
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_SET);
HAL_Delay(1); // 10us以上
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_RESET);
}
/**
* @description: 定时器计数溢出中断处理函数
* @param {*} main.c中重定义void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
* @return {*}
*/
void Hcsr04TimOverflowIsr(TIM_HandleTypeDef *htim)
{
if(htim->Instance == Hcsr04Info.instance) //
{
Hcsr04Info.tim_overflow_counter++;
}
}
/**
* @description: 输入捕获计算高电平时间->距离
* @param {*} main.c中重定义void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
* @return {*}
*/
void Hcsr04TimIcIsr(TIM_HandleTypeDef* htim)
{
if((htim->Instance == Hcsr04Info.instance) && (htim->Channel == Hcsr04Info.active_channel))
{
if(Hcsr04Info.edge_state == 0) // 捕获上升沿
{
// 得到上升沿开始时间T1,并更改输入捕获为下降沿
Hcsr04Info.t1 = HAL_TIM_ReadCapturedValue(htim, Hcsr04Info.ic_tim_ch);
__HAL_TIM_SET_CAPTUREPOLARITY(htim, Hcsr04Info.ic_tim_ch, TIM_INPUTCHANNELPOLARITY_FALLING);
Hcsr04Info.tim_overflow_counter = 0; // 定时器溢出计数器清零
Hcsr04Info.edge_state = 1; // 上升沿、下降沿捕获标志位
}
else if(Hcsr04Info.edge_state == 1) // 捕获下降沿
{
// 捕获下降沿时间T2,并计算高电平时间
Hcsr04Info.t2 = HAL_TIM_ReadCapturedValue(htim, Hcsr04Info.ic_tim_ch);
Hcsr04Info.t2 += Hcsr04Info.tim_overflow_counter * Hcsr04Info.period; // 需要考虑定时器溢出中断
Hcsr04Info.high_level_us = Hcsr04Info.t2 - Hcsr04Info.t1; // 高电平持续时间 = 下降沿时间点 - 上升沿时间点
// 计算距离
Hcsr04Info.distance = (Hcsr04Info.high_level_us / 1000000.0) * 340.0 / 2.0 * 100.0;
// 重新开启上升沿捕获
Hcsr04Info.edge_state = 0; // 一次采集完毕,清零
__HAL_TIM_SET_CAPTUREPOLARITY(htim, Hcsr04Info.ic_tim_ch, TIM_INPUTCHANNELPOLARITY_RISING);
}
}
}
/**
* @description: 读取距离
* @param {*}
* @return {*}
*/
float Hcsr04Read(void)
{
// 测距结果限幅
if(Hcsr04Info.distance >= 450)
{
Hcsr04Info.distance = 450;
}
return Hcsr04Info.distance;
}
hc-sr04.h
/*
* @Author : yzy
* @Date : 2021-05-31 17:03:27
* @LastEditors : yzy
* @LastEditTime : 2021-05-31 19:02:54
* @Description :
* @FilePath : \F103_Test\BSP_HARDWARE\hc-sr04.h
*/
#ifndef HCSR04_H_
#define HCSR04_H_
#include "main.h"
typedef struct
{
uint8_t edge_state;
uint16_t tim_overflow_counter;
uint32_t prescaler;
uint32_t period;
uint32_t t1; // 上升沿时间
uint32_t t2; // 下降沿时间
uint32_t high_level_us; // 高电平持续时间
float distance;
TIM_TypeDef* instance;
uint32_t ic_tim_ch;
HAL_TIM_ActiveChannel active_channel;
}Hcsr04InfoTypeDef;
extern Hcsr04InfoTypeDef Hcsr04Info;
/**
* @description: 超声波模块的输入捕获定时器通道初始化
* @param {TIM_HandleTypeDef} *htim
* @param {uint32_t} Channel
* @return {*}
*/
void Hcsr04Init(TIM_HandleTypeDef *htim, uint32_t Channel);
/**
* @description: HC-SR04触发
* @param {*}
* @return {*}
*/
void Hcsr04Start(void);
/**
* @description: 定时器计数溢出中断处理函数
* @param {*} main.c中重定义void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
* @return {*}
*/
void Hcsr04TimOverflowIsr(TIM_HandleTypeDef *htim);
/**
* @description: 输入捕获计算高电平时间->距离
* @param {*} main.c中重定义void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
* @return {*}
*/
void Hcsr04TimIcIsr(TIM_HandleTypeDef* htim);
/**
* @description: 读取距离
* @param {*}
* @return {*}
*/
float Hcsr04Read(void);
#endif /* HCSR04_H_ */
驱动文件里面函数的具体使用都有介绍,我就不做过多解释了。
2、添加中断回调函数
如果有了解过超声波的工作原理的话就可以知道使用到了定时器,我们还配置了TIM4一通道为输入捕获,所以我们需要输出捕获中断和定时器溢出中断的回调函数。
/* USER CODE BEGIN 4 */
/**
* @description: 定时器输入捕获中断
* @param {TIM_HandleTypeDef} *htim
* @return {*}
*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
Hcsr04TimIcIsr(htim);
}
/**
* @description: 定时器溢出中断
* @param {*}
* @return {*}
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
Hcsr04TimOverflowIsr(htim);
}
/* USER CODE END 4 */
示例:文章来源:https://www.toymoban.com/news/detail-433102.html
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM4_Init();
/* USER CODE BEGIN 2 */
Hcsr04Init(&htim4, TIM_CHANNEL_1); // 超声波模块初始化
Hcsr04Start(); // 开启超声波模块测距
printf("hc-sr04 start!\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// 打印测距结果
Hcsr04Start();
printf("distance:%.1f cm\r\n", Hcsr04Read());
HAL_Delay(300); // 测距周期300ms
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
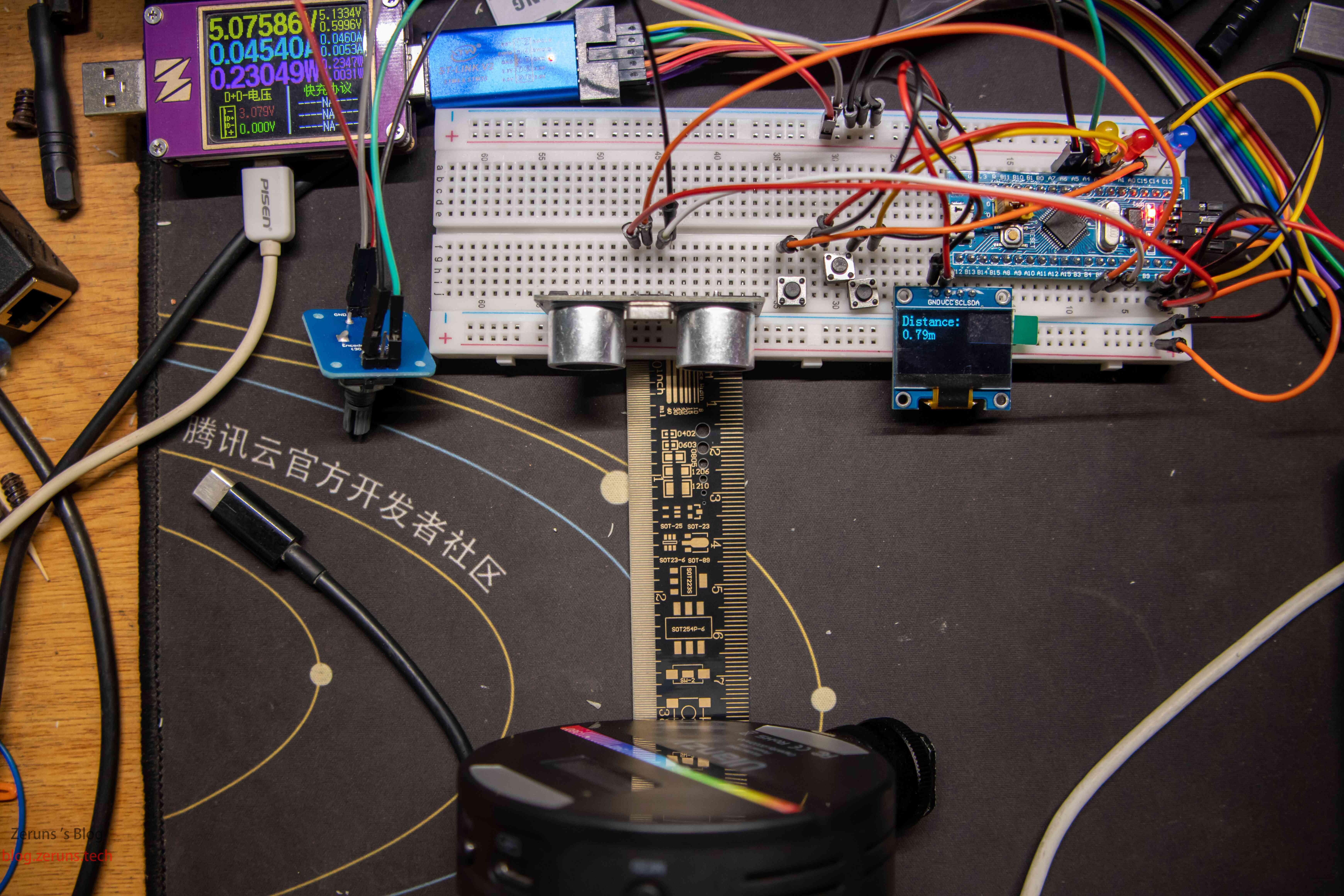
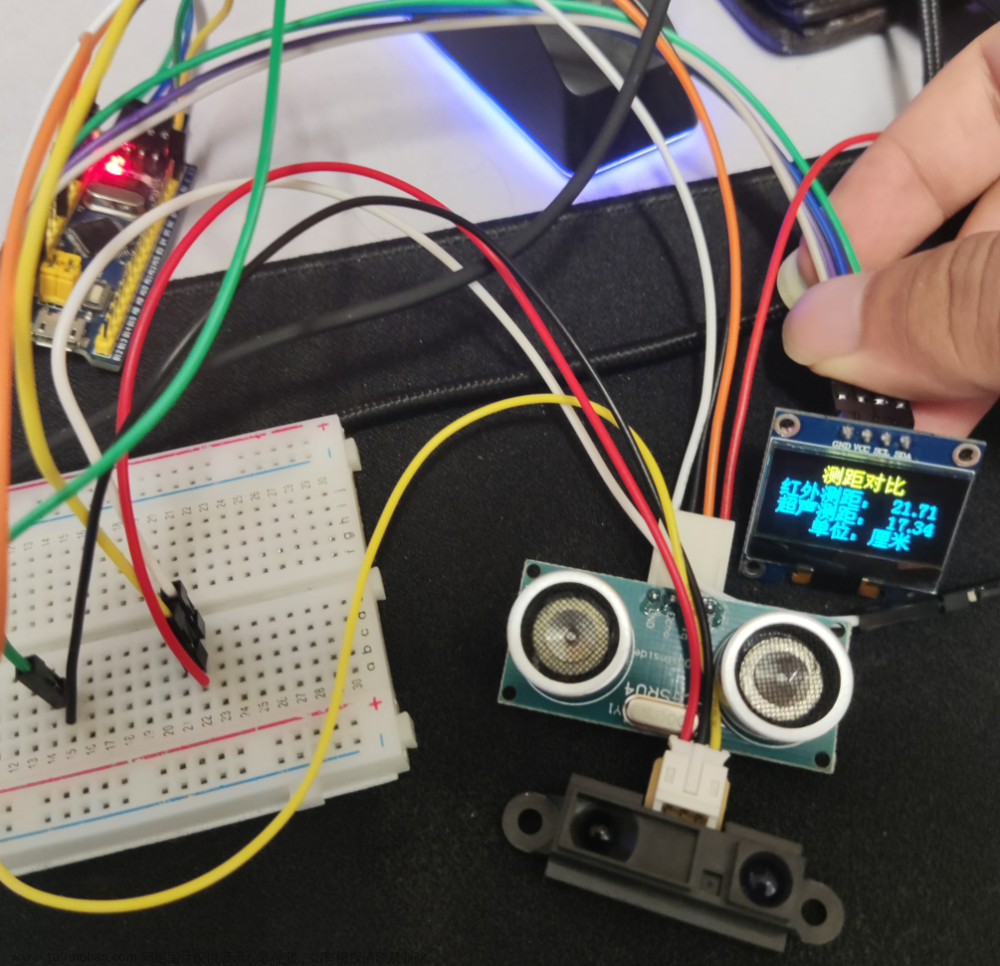
效果图如下: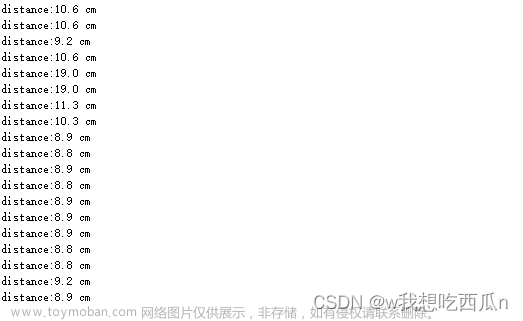
发送端发送一个大于10us的高电平,发送结束后接收端立即置高,当接收到返回的声波信号时置低,所以在输入捕获的接收函数中有将上升沿捕获改为下降沿捕获的做法,也可以直接将输入捕获设置两个通道,一个上升沿一个下降沿。
如果有什么错误欢迎大家指正。谢谢啦文章来源地址https://www.toymoban.com/news/detail-433102.html
到了这里,关于【CubeMX配置STM32驱动超声波模块(HC-SR04)】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!