串口的简单介绍
RS-232与TTL
根据通讯使用的电平标准不同,串口通讯可分为 TTL 标准及 RS-232 标准。而STM32的串口是TTL电平标准的。如果需要使用到RS-232则需要一个电平转换芯片。
单工通信、半双工通信和全双工通信
讲到串口,我们还需要具备这些基础概念。
单工通讯
(1)单工通讯特点很简单,就是只有一个发送端,一个接收端。从一开始发射端和接收端就已经确立,无法改变,数据传输只能从发送端向接收端发送。
(2)举个生活中的例子,你可以理解为某些霸道的家长,从一开始就已经确定了他是发射端,小孩只能被动接收。只能是家长教育孩子,不能孩子指正家长。

半双工通信
(1)半双工通信的特点就是,双方既可以是发送端又可以是接收端。不过问题在于,每一次数据传输过程中,任何一方只能为一种状态。如果你是接收端,就只能是接收端。如果你是发送端,那么就只能是发送端。
(2)以生活中能够见到的对讲机为例,当A在对讲机中说话的时候。B只能听,不能说话。如果B要说话了,那么需要等待A说话完成之后,B才能说话。

全双工通信
(1)在全双工传输模式下,发送方和接收方之间的通信可以同时进行,我可以是发送端的同时,又是接收端。
(2)以我们打电话为例子。如果A打电话给B,B听到了与A不同的意见的时候,B可以在A说话的同时陈述自己的观点,也就是插嘴。(不礼貌,手动狗头)
(3)STM32的串口就是全双工的,不过一般都是使用半双工的方式收发信息。

串口作用以及需要配置的东西
(1)串口通讯作为最常用的通讯手段之一,作用许多。最常见的就是使用蓝牙模块或者是WIFI模块进行通讯,也可以实现与OpenMV实现通讯。
(2)串口一般都有波特率,数据位,校验位,停止位,流控需要配置。为什么需要配置这些东西呢?因为两个不同的设备进行交流的时候,需要在同一个频道上。就好比,一个只会说中文的人与一个只会说英文的人是无法进行沟通的。

既然两个人要需要共同,那么只要说一种语言就行了,为什么还有这么多配置呢?接下来我一一介绍。
波特率
(1)串口其实分为两种UART(异步通信)和USART(同步通讯)。这两者的区别是什么呢?
(2)同步通讯你可以理解为你打电话给别人,电话双方都是同时沟通交流的。
(3)而异步通讯,你可以理解为电话留言。我发一段话给你,你不在没关系,有时间的时候听就可以了。我们一般使用异步通讯。
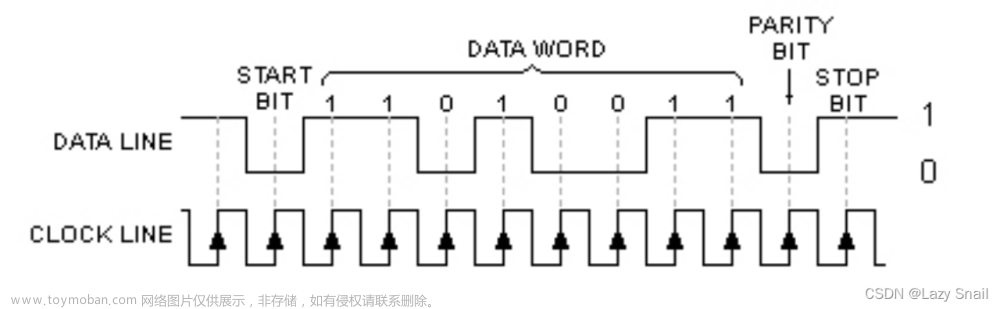
数据位
数据位,决定了通信过程中传输的有效数据位数,数据位通常有5、6、7 、8 bit,根据需要进行相应的配置,一般配置为8bit,因为一个字节就是8bit。
校验位
有时候,我们需要对接收到的数据进行判断是否正确。因为有时候进行数据交互过程中,可能受到一些外接干扰。一般来说会有4中校验方式。偶校验、奇校验、1校验和0校验。
偶校验:有效数据和校验位中“1”的个数为偶数。比如有效数据:11001010, 此时有效数据“1”的个数为 4 个,所以偶校验位为“0”。如果我们接收到的数据,查看偶校验位为1,表示数据受到干扰。
奇校验:有效数据和校验位中“1”的个数为奇数。比如有效数据:01101001, 此时总共有 4 个“1”,为达到奇校验效果,校验位为“1”。如果我们接收到的数据,查看奇校验位为0,表示数据受到干扰。
1校验:无论什么内容,校验位永远是1。如果受到的数据,校验位是0,表示数据受到干扰。
0校验:无论什么内容,校验位永远是0。如果受到的数据,校验位是1,表示数据受到干扰。
停止位
(1)停止位一般有1,1.5,2。因为不同设备的时钟可能有偏差,就好像即使是双胞胎也有不同一样。
(2)而微小的时钟偏差,会出现微弱的不同步现象。只进行一次数据传输还好,当我们进行多次数据传输之后,这个不同步会逐渐放大,最后导致数据传输有问题。所以停止位还提供了一次校正时钟同步的机会。
(3)这个过程就好像是一条笔直的路线,汽车一直往前开。假如司机不小心动了一点点方向盘,只走几十米可能看不出来偏差。但是假如再走个几百米,就能够看到明显偏移了路线。所以司机需要不断修正方向盘保持直行。
流控
(1)这个对于很多刚入门的人不会关注,都是直接设置无流控的,我也没用过。还是简单介绍一下。
(2)因为两个不同的设备对数据的处理速度不同,可能导致丢失数据的情况。比如A向B发送数据,A的处理速度极快,不断给B发送数据。但是B处理速度可能慢一点,会接收不过来,导致数据丢失。
(3)举个例子。就像我们上模电课,老师思路敏捷,滔滔不绝。但是我们对这些知识的处理速度可能会慢一点。这样就会导致,做作业的时候,很奇怪,这个东西讲过吗?
(4)流控又分为硬件流控与软件流控。硬件流控就是 RTS (Require ToSend,发送请求)和CTS (Clear ToSend,发送允许)这两个引脚。这个时候串口通讯就不再是只有GND,TX,RX这三个了,将会增加RTS 和CTS 这两个引脚。
(5)一般不用流控。需要更深了解的,自行学习。
最后强调一点!
TX(Transmit )发送数据,需要与另外一个MCU的RX连接(Receive )。两边的GND要连接,因为都需要知道对方的基准电压是多少!

STM32CubeMX配置
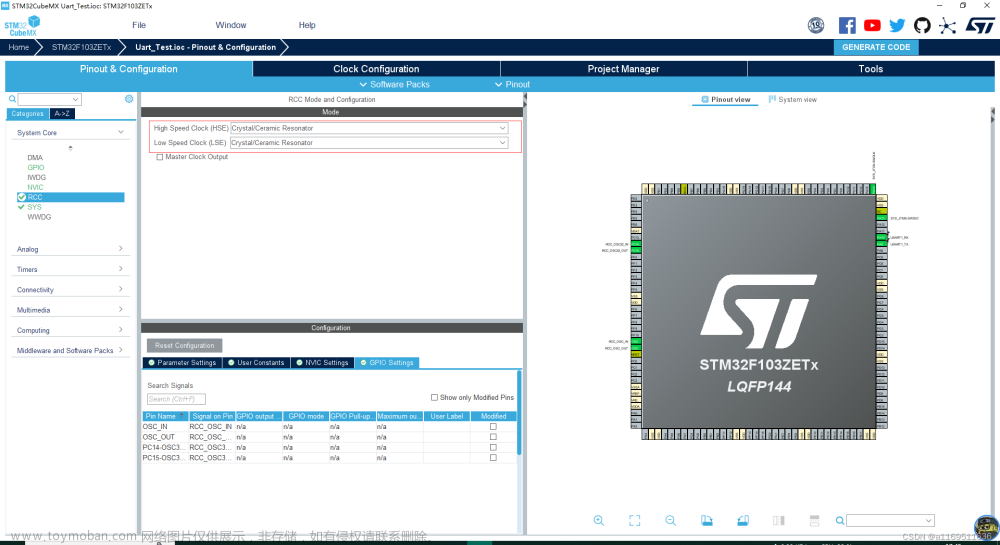
时钟配置
还是和之前的一样步骤



UART配置


生成文件


Keil编程
查看 MX_USART1_UART_Init();
我发现我生成的串口文件里面没用进行串口使能,即使我再CubeMX里面设置了。
所以你们要看看__HAL_UART_ENABLE_IT()这个函数。


void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/*使能串口接收断 */
__HAL_UART_ENABLE_IT(&huart1,UART_IT_RXNE);
}编写中断服务程序
在stm32f1xx_it.c中找到void USART1_IRQHandler(void)。

void USART1_IRQHandler(void)
{
uint8_t ch=0;
if(__HAL_UART_GET_FLAG( &UartHandle, UART_FLAG_RXNE ) != RESET)
{
ch=( uint16_t)READ_REG(UartHandle.Instance->DR);
WRITE_REG(UartHandle.Instance->DR,ch);
}
}代码解析
其实也没什么可以说的。就讲解一下中断服务函数部分。
__HAL_UART_GET_FLAG()
(1)因为串口中断由多种行为引起,比如主控发送数据可以引起,主控接收到数据也可以引起。所以我们需要知道到底是那种行为引起的中断。
(2)一般只要了解接收中断即可,所以我只讲接收中断部分。
if(__HAL_UART_GET_FLAG( &huart1, UART_FLAG_RXNE ) != RESET)
{
}(1)huart1就是你在串口初始化的时候STM32CubeMX定义的。你复制后面这个部分写在huart1位置即可。
(2)后面的UART_FLAG_RXNE表示接收中断。
(3)如果是接收中断,__HAL_UART_GET_FLAG()将会返回SET,如果不是接收中断返回RESET。这个if就是用来判断是否为接收中断,如果是接收中断进入if语句。

READ_REG()和WRITE_REG()
这个不是函数,是宏定义。我们鼠标点击READ_REG,然后按F12。即可查看他的定义。
#define WRITE_REG(REG, VAL) ((REG) = (VAL))
#define READ_REG(REG) ((REG))(1)其实这个就是直接寄存器操作,操作DR寄存器。
(2)无论是发送的数据还是接收的数据我们都存放在DR寄存器中,如果是发送数据,那么就让DR寄存器写入数据。如果是接收数据,那么就将DR寄存器的数据存入变量中。
(3)所以READ_REG()是读取数据,WRITE_REG()是发送数据。

如果要更改发送接收数据的串口怎么办?
/*****usart.c*****/
UART_HandleTypeDef huart1; //假如这个是串口1的结构体
UART_HandleTypeDef huart2; //假如这个是串口2的结构体
/***stm32f1xx_it.c***/
void USART1_IRQHandler(void) //串口1中断函数
{
uint8_t ch=0;
if(__HAL_UART_GET_FLAG( &huart1, UART_FLAG_RXNE ) != RESET)
{
ch=( uint16_t)READ_REG(huart1.Instance->DR);
WRITE_REG(huart1.Instance->DR,ch);
}
}
void USART2_IRQHandler(void) //串口2中断函数
{
uint8_t ch=0;
if(__HAL_UART_GET_FLAG( &huart2, UART_FLAG_RXNE ) != RESET)
{
ch=( uint16_t)READ_REG(huart2.Instance->DR);
WRITE_REG(huart2.Instance->DR,ch);
}
}
实验
软件准备
需要一个串口工具。gitee仓库自取
材料准备
需要一个TTL转串口模块。TX——RX,GND——GND,3.3——3.3。
 文章来源:https://www.toymoban.com/news/detail-433796.html
文章来源:https://www.toymoban.com/news/detail-433796.html
实验结果
电脑发送什么,单片机就回什么。文章来源地址https://www.toymoban.com/news/detail-433796.html
到了这里,关于STM32CubeMX串口通讯的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!