本文编辑:调皮哥的小助理
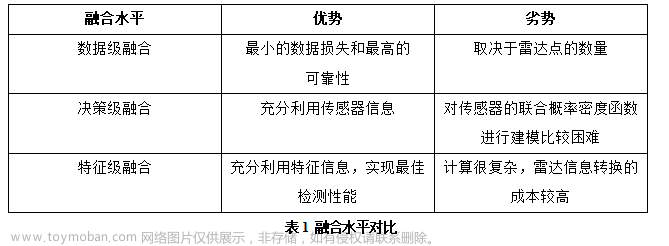
今天分享的是基于MATLAB的3D MIMO-SAR 毫米波成像工具箱,作者是穆罕默德·艾敏·雅尼克(Muhammet Emin YANIK)。该工具箱实现了三维 (3-D) 全息 MIMO-SAR 成像算法关键的信号处理功能,例如适用于大 MIMO 孔径的近场多基地图像重建、多通道阵列校准以及多基地到单基地的转换,都在 3-D MIMO-SAR 成像的背景下进行了介绍。


[成像效果]
一、MATLAB官方地址https://ww2.mathworks.cn/matlab
二、源代码和数据集
在近场应用中使用毫米波传感器进行 3-D MIMO-SAR 成像的链接如下:
https://github.com/meminyanik/3
可以从以下链接下载示例数据集:
https 😕/http://utdallas.box.com/v/3D-M
三、作者论文
涉及到作者发表的论文是下面两篇:
【1】Yanik, Muhammet Emin, et al. “3-D MIMO-SAR Imaging Using Multi-Chip Cascaded Millimeter-Wave Sensors.” 2019 IEEE Global Conference on Signal and Information Processing (GlobalSIP), IEEE, 2019, doi:10.1109/globalsip45357.2019.8969133.
【2】Yanik, Muhammet Emin, and Murat Torlak. “Near-Field MIMO-SAR Millimeter-Wave Imaging With Sparsely Sampled Aperture Data.” IEEE Access, vol. 7, Institute of Electrical and Electronics Engineers (IEEE), 2019, pp. 31801–19, doi:10.1109/access.2019.2902859.
论文可以在SCI-hub下载输入doi,网址是:sci-hub.ee/
四、结语文章来源:https://www.toymoban.com/news/detail-434315.html
本文可以结合之前分享过的文章:雷达分享汇| MIMO-SAR 毫米波雷达成像工具箱,一起学习,两篇文章都是同一个作者。文章来源地址https://www.toymoban.com/news/detail-434315.html
到了这里,关于雷达分享汇 | 3D MIMO-SAR 毫米波成像的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!