Reference
透视变换原理和变换矩阵的python实现
个人理解,可能有误,欢迎讨论。
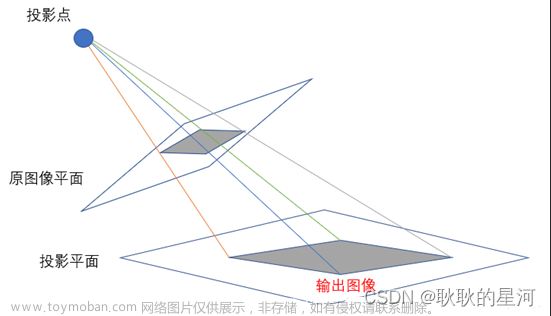
进行透视变换,需要选择四个点,这些点定义了一个长方形,但是在原始图像中由于照相角度等问题,它并没有呈现出是一个长方形,为了变换视角,我们需要进行透视变换。
透视变换本质上是将图片从一种视角通过四个点之间的线性变换得到另一种视角。
计算公式
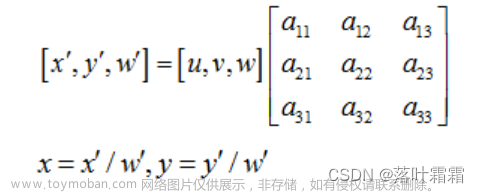
透视变换矩阵:

我们定义目标点矩阵为 ,定义源点矩阵为
,定义源点矩阵为 。
。
这是从二维像素坐标映射到三维世界坐标,我们这里的主要还是想把像素坐标映射到另一个像素坐标。
采用
对于每一对 都满足下列等式
都满足下列等式
因此,我们可以得到公式(1)
上下相乘,继续推导可得:
我们需要求得 ,另
,另 为未知数,将方程转换为矩阵
A
X
=
0
AX=0
AX=0
为未知数,将方程转换为矩阵
A
X
=
0
AX=0
AX=0
此时有9个未知数,我们需要用9个方程来求解,对于一对匹配点我们可以得到两个方程。
为啥我们只需要4对匹配点就能求解上面的方程勒。文章来源:https://www.toymoban.com/news/detail-434334.html
8未知数
我们发现对于公式(1)可以写成以下形式,结果不会改变。 其中
α
\alpha
α为不为0的数
其中
α
\alpha
α为不为0的数
此时,将上述公式映射回矩阵形式,我们可以得到
因此,我们可以得到
此时就只有8个未知数了,我们就只需要找4组对应点就可以求解方程。
反应到求解公式上就如下所示。
最后一位为常数1,我们可以修改公式为 公式(3) 文章来源地址https://www.toymoban.com/news/detail-434334.html
文章来源地址https://www.toymoban.com/news/detail-434334.html
代码求解——自己实现
# 此处的src是原坐标数组,dst是目标坐标数组
def WarpPerspectiveMatrix(src, dst):
assert src.shape[0] == dst.shape[0] and src.shape[0] >= 4
nums = src.shape[0]
# 4组对应点,每组2行8列
# 总共8行8列的数组,对应公式(3)中最左边的矩阵
A = np.zeros((2 * nums, 8))
# 4组对应点,每组2行1列
# 总共8行1列,对应公式(3)中最右边的矩阵
B = np.zeros((2 * nums, 1))
# 矩阵赋值,0下标为x值,1下标为y值
for i in range(0, nums):
A_i = src[i,:]
B_i = dst[i,:]
A[2*i, :] = [A_i[0], A_i[1], 1, 0, 0, 0, -A_i[0]*B_i[0], -A_i[1]*B_i[0]]
B[2*i] = B_i[0]
A[2*i+1, :] = [0, 0 , 0, A_i[0], A_i[1], 1, -A_i[0]*B_i[1], -A_i[1]*B_i[1]]
B[2*i+1] = B_i[1]
# 转换为矩阵
A = np.mat(A)
# 求解未知数值,.I表示求逆
warpMatrix = A.I * B
# 矩阵后处理,主要是将a33的1值赋值回去
warpMatrix = np.array(warpMatrix).T[0]
warpMatrix = np.insert(warpMatrix, warpMatrix.shape[0], values=1.0, axis=0)
warpMatrix = warpMatrix.reshape((3, 3))
return warpMatrix
代码求解——Opencv实现
# 注意,这里的src和dst,本人验证,使用np.float32()定义可以不出错
M = cv2.getPerspectiveTransform(src, dst)
src = np.float32([[34 * 720 / 160, 113 * 1280 / 288], [34 * 720 / 160, 186 * 1280 / 288], [157 * 720 / 160, 50 * 1280 / 288], [157 * 720 / 160, 244 * 1280 / 288]])
dst = np.float32([[150, 50], [150, 490], [780, 50], [780, 490]])
def WarpPerspectiveMatrix(src, dst):
assert src.shape[0] == dst.shape[0] and src.shape[0] >= 4
nums = src.shape[0]
A = np.zeros((2 * nums, 8))
B = np.zeros((2 * nums, 1))
for i in range(0, nums):
A_i = src[i,:]
B_i = dst[i,:]
A[2*i, :] = [A_i[0], A_i[1], 1, 0, 0, 0, -A_i[0]*B_i[0], -A_i[1]*B_i[0]]
B[2*i] = B_i[0]
A[2*i+1, :] = [0, 0 , 0, A_i[0], A_i[1], 1, -A_i[0]*B_i[1], -A_i[1]*B_i[1]]
B[2*i+1] = B_i[1]
A = np.mat(A)
warpMatrix = A.I * B
warpMatrix = np.array(warpMatrix).T[0]
warpMatrix = np.insert(warpMatrix, warpMatrix.shape[0], values=1.0, axis=0)
warpMatrix = warpMatrix.reshape((3, 3))
return warpMatrix
M = WarpPerspectiveMatrix(src, dst)
print(M)
M = cv2.getPerspectiveTransform(src, dst)
print(M)
# 自己实现的
[[ 6.41178433e+00 0.00000000e+00 -7.04158205e+02]
[ 1.54253726e+00 2.50298025e+00 -1.40077892e+03]
[ 5.52700641e-03 0.00000000e+00 1.00000000e+00]]
# opencv官方的
[[ 6.41178433e+00 0.00000000e+00 -7.04158205e+02]
[ 1.54253726e+00 2.50298025e+00 -1.40077892e+03]
[ 5.52700641e-03 -1.08420217e-19 1.00000000e+00]]
到了这里,关于逆透视变换——变换矩阵的Python实现的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!