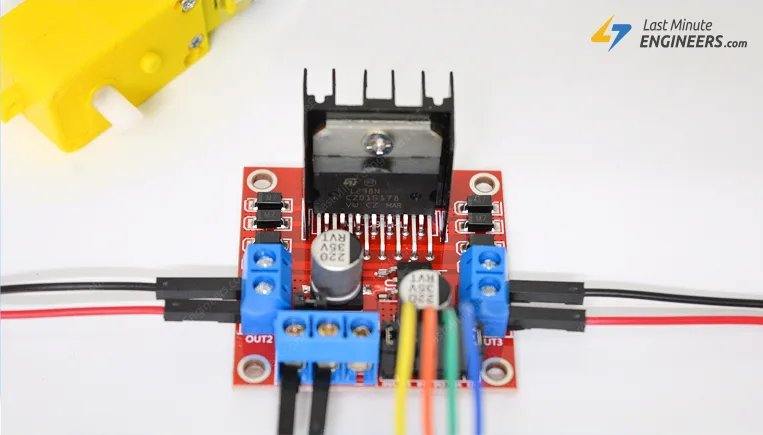
一个L298N是带有俩路驱动电路的,就是可以驱动俩个电机同时去转动,在硬件部分因为以前弄小车的时候已经组装好了,一路驱动去控制俩个电机,俩路驱动就是控制四个电机,做的是四轮四驱的小车,嫌麻烦就没有去拆改装了。

博主主页里面有介绍过L298N的使用了,为了避免一些小伙伴不明白还是重新介绍一下,方便大家的使用。
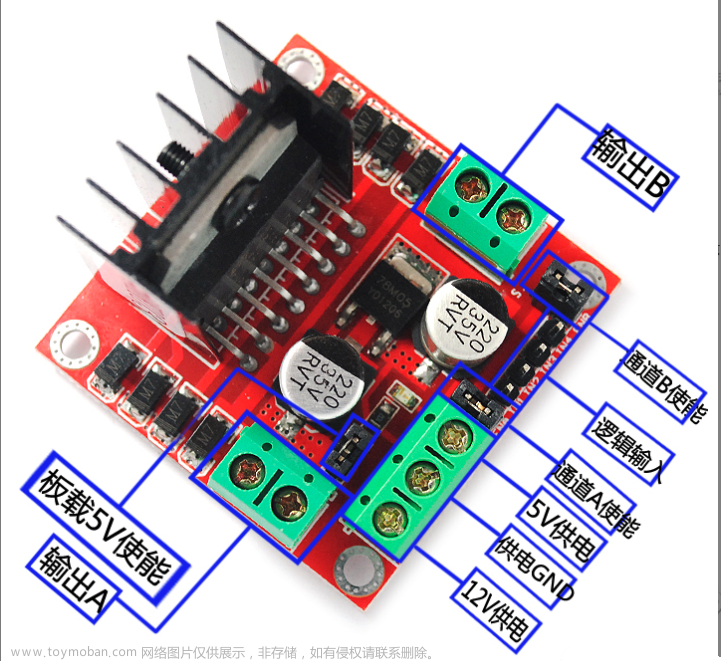
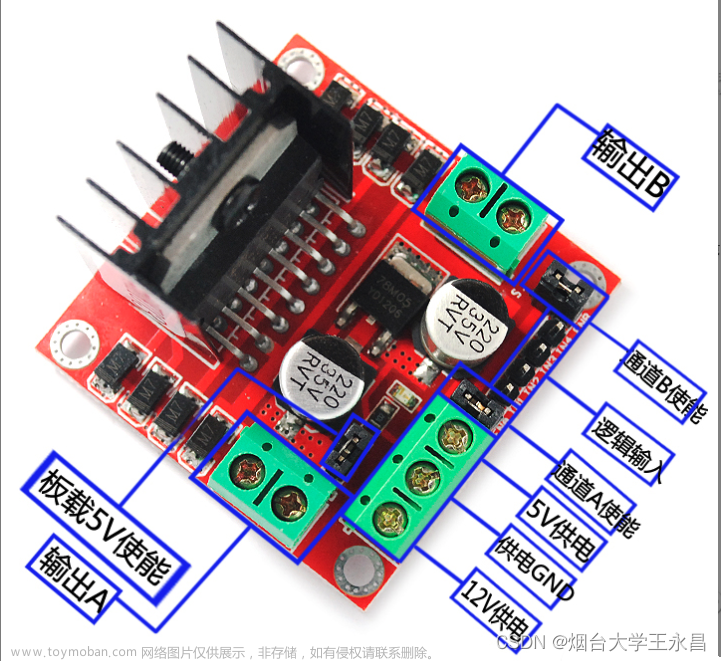
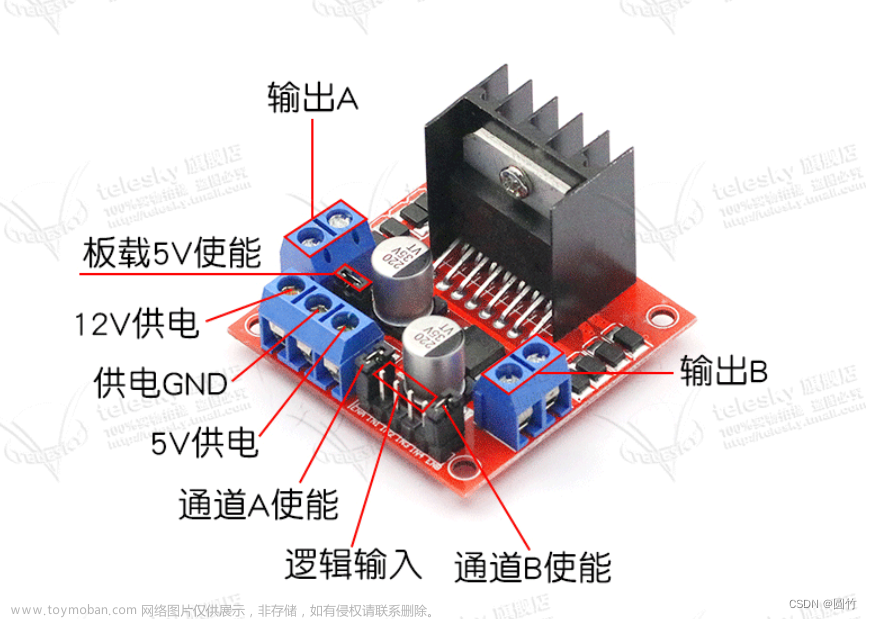
一、L298N的结构介绍示意图如下

1.12v电压输入,GND供地端,5v我自己认为是输出一个5v的接口但上一节的时候不是很明白就没有去作过多的描述,现在可以确定了可以输出一个5v供电。

当vcc端接入一个7~12v的电压时,正5v不需要接电压,GND接单片机的GND,可以输出一个5v电压给单片机使用。
2.使能端,L298N有俩个使能端口,分别是ENA和ENB,用一个跳线帽接在板载5v上面,逻辑输入数字信号0,1就可以在相应得输出端输出信号,因为在只有数字信号0,1所以并不能实现电机的调速,只能实现电机的左右转。调速就把跳线帽拔下来,用一个PWM信号脉冲波接着使能端,也就是ENA或ENB,这样就能通过控制PWM的占空比来实现电机的调速。
3逻辑输入端口,IN1-IN4四个输入口,对应着相应的输出端口,给0,1就能控制电机的正反转
4.输出口,接电机的正反极,不分正负极随便接都行。
二、L298N的使用说明:
直流电机的驱动:
L298N能输出俩路控制俩个电机转动,使能端ENA和ENB高电平有效。
如图所示真值表:

我们需要对电机进行调速,需要设置IN1,IN2确定电机的转动方向,然后拔掉跳线帽接上PWM信号。调整占空比就可以实现电机的调速,注意当使能端信号为0时电机处于停止状态,当使能端为1,逻辑输入全部为0或1的时候电机制动,会阻止电机转动,只有逻辑输入为01或10的时候电机才会正常转动。
三、基于STM32的部分代码
1.PWM初始化,因为是要驱动俩路电机,所以初始化当中要使能俩路通道,不懂得小伙伴可以去主页看一下有讲。在实验中我们初始化了四路通道,任选其中俩路都是可以的。
定时器2初始化
// 通用定时器2中断初始化
// 这里时钟选择APB1的2倍,而APB1为36M
// arr自动重装值
// psc时钟分频数
void TIM2_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // 时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; // 自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; // 时钟分频数
TIM_TimeBaseStructure.TIM_ClockDivision = 0; // 设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //时候基数单位
TIM_Cmd(TIM2, ENABLE); //使能
}PWM初始化
void TIM2_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO|
RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2 , ENABLE); //Timer2部分重映射
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_15; //TIMx_CHx
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr;//下一个更新事件载入活动的自动重装载寄存器周期值
TIM_TimeBaseStructure.TIM_Prescaler = psc; // 预分频值,不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);// 初始化时钟基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //脉宽调制模式2
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性为高
TIM_OCInitStructure.TIM_OutputState= TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
//根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //
TIM_OC4Init(TIM2, &TIM_OCInitStructure); //
//使能预装载寄存器
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE); //使能自动装载允许位
TIM_Cmd(TIM2, ENABLE); //使能定时器
}2.电机初始化,采用的是直流减速电机不带编码器。
void motro_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF, ENABLE); //使能GPIOF端口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4| GPIO_Pin_5| GPIO_Pin_6| GPIO_Pin_7;//端口设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置速度
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOF
GPIO_SetBits(GPIOF,GPIO_Pin_4| GPIO_Pin_5| GPIO_Pin_6| GPIO_Pin_7); //输出高电平
}
3.按键初始化
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
//使能 PORTA,PORTE时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_3;//KEY0-KEY1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化io
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化io
}3.1.按键扫描函数
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;//按键松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||WK_UP==1))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY0==0)return KEY0_PRES;
else if(KEY1==0)return KEY1_PRES;
else if(WK_UP==1)return WKUP_PRES;
}else if(KEY0==1&&KEY1==1&&WK_UP==0)key_up=1;
return 0;// 无按键按下
}4.主函数
int main(void)
{
u8 key;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统优先级分组2
delay_init(); //延时函数初始化
uart_init(115200);//初始串口波特率为115200
KEY_Init(); //按键初始化
motro_Init();//电机初始化
TIM2_PWM_Init(899,0); //PWM初始化
while(1) //ʵÏֱȽÏÖµ´Ó0-300µÝÔö£¬µ½300ºó´Ó300-0µÝ¼õ£¬Ñ»·
{
key=KEY_Scan(0); //得到键值
if(key)
{
switch(key)
{
case KEY0_PRES: //控制电机翻转
F4=0;
F5=0;
F6=1;
F7=1;
break;
case KEY1_PRES: //
F4=1;
F5=1;
F6=0;
F7=0;
break;
}
}else delay_ms(10);
//设置占空比
TIM_SetCompare1(TIM2,350);
TIM_SetCompare2(TIM2,350);
TIM_SetCompare3(TIM2,350);
TIM_SetCompare4(TIM2,350);
}
}
四、实验效果:
PWM控制小车前后转文章来源:https://www.toymoban.com/news/detail-435233.html
拍的不是很好,将就着看吧哈哈,需要完整工程文件的点赞加收藏评论区留邮箱,创作不易。文章来源地址https://www.toymoban.com/news/detail-435233.html
到了这里,关于L298N驱动俩路电机按键控制正反转的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!