CVPR 2022 论文链接
源代码:Github
1 速读
1.1 论文试图解决什么问题?这是否是一个新的问题?
试图解决:基于PnPDE的单目物体位姿估计,需要获得图像中点的3D深度(通过深度网络之类的方法)以及2D-3D之间的关联,然后通过PnP求解得到物体位姿;而PnP本质上不可导,使得无法通过反向传播位姿的误差训练网络;
文章通过将求解位姿转换为预测位姿的概率密度解决这一问题,实现了基于位姿真值的端到端训练网络学习2D-3D关联;
在端到端训练PnP求解位姿网络不是新问题,但是以往方法对PnP的处理无法解决PnP不可导带来的收敛问题;
文章解决的新问题为:在没有形状先验的情况下,通过位姿误差直接端到端地训练得到2D-3D关联及权重系数;
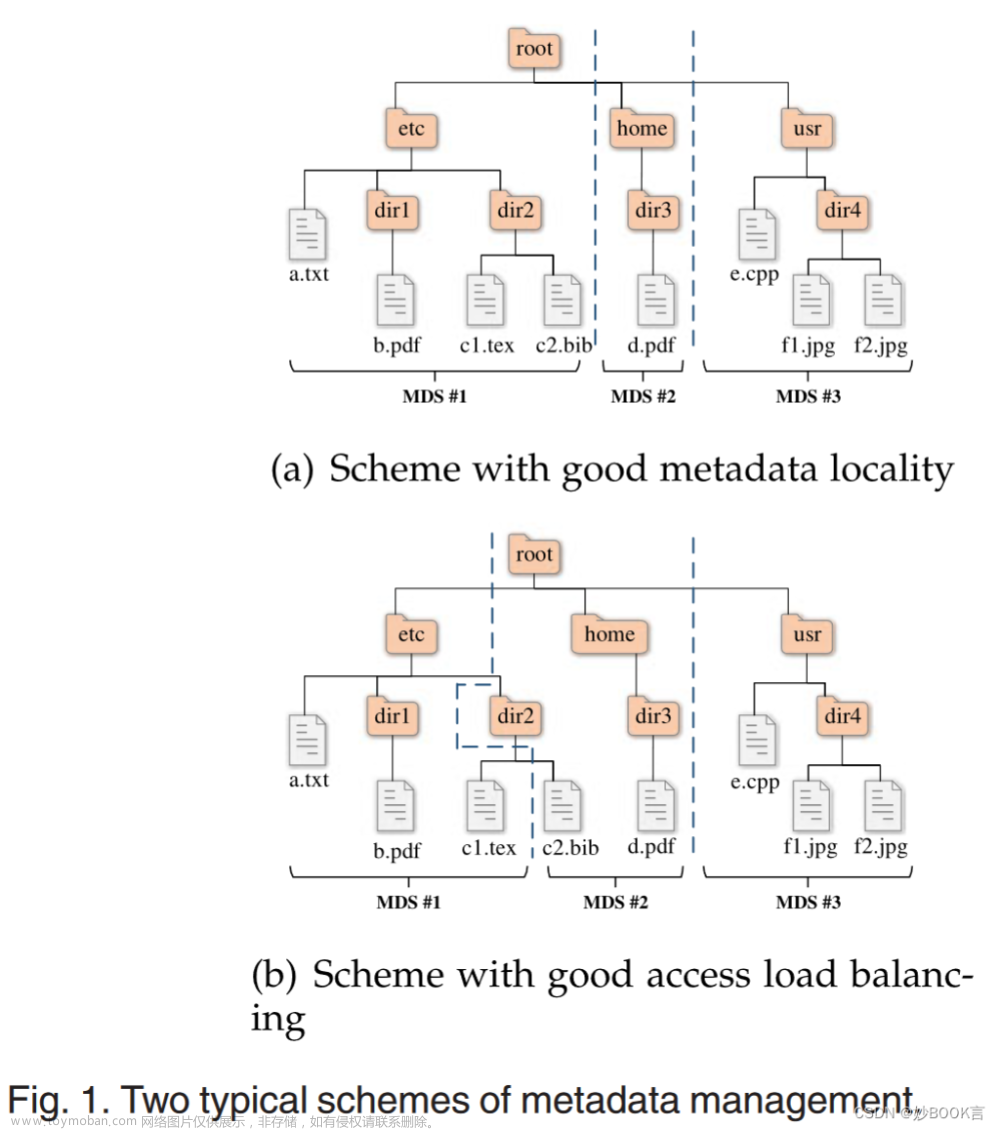
1.2 有哪些相关研究?如何归类?谁是这一课题在领域内值得关注的研究员?
①直接位姿预测(显式方法):一个前馈网络需要预测:深度+图像上的投影位置+物体朝向(等信息),利用标注的物体真实位姿计算损失函数,完成端到端训练
显式的方法中,物体系到相机系的转化包含在了网络结果中,这导致网络解释性差+容易过拟合;![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-1.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-2.png)
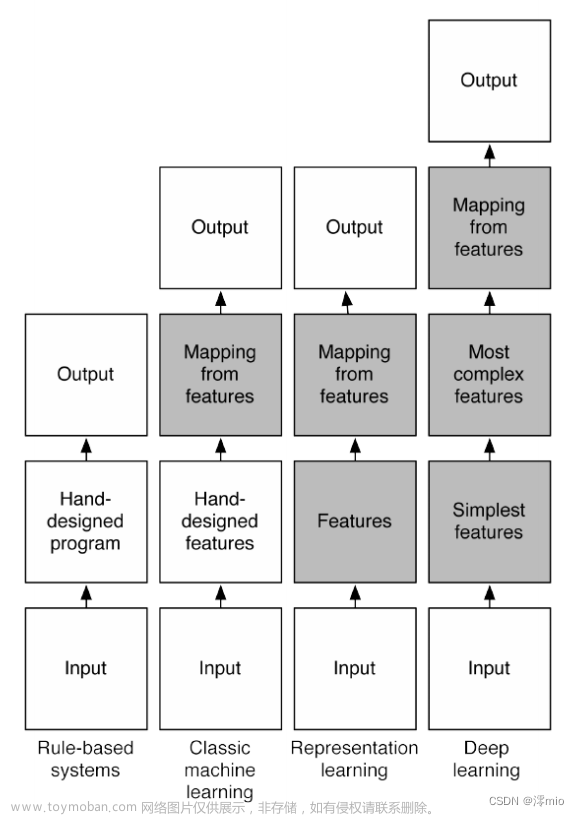
②基于PnP的位姿估计方法(隐式方法):需要给出图像坐标系下N个2D点+物体坐标系下N个3D点+各对点的关联权重(网络或者传统方法给出),通过2D-3D匹配求解最优位姿
显示的方法中,现有的神经网络策略集中在获取更准确的2D-3D的匹配关系,从而确保PnP的结果足够精确,这存在一个问题即:希望得到最优的位姿而解决方式是通过一个Surrogate loss中间损失函数完成;
同样有网络尝试从端到端优化这个问题,但是由于argmin函数不可导的性质,导致这个过程是不稳定的;![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-3.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-4.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-5.png)
③基于概率的深度学习:略过,作者主要提及Softmax,因为文章将其推广到连续域
1.3 文章的贡献是什么?
①提出了用于端到端位姿估计的概率PnP层:EPro-PnP,将不可微的确定PnP操作转化为可微的概率层
②提出的EPro-PnP可嵌入到基于PnP的工程中,也可以通过论文的思路灵活设计2D-3D关联网络
③将离散SoftMax拓展到连续域的思路,可以推广到其他嵌套了优化层的网络
1.4 文章解决方案的关键是什么
核心在于:将PnP位姿优化问题转变为预测位姿概率密度的问题
①将离散分类SoftMax引入连续域;
②通过最小化预测位姿和目标位姿构成的KL散度学习2D-3D之间的对应关系和权重;
1.5 实验如何设计?实验结果足够论证其效果吗?
1.6 数据集是什么?
LineMOD数据集:13条序列共1200张图片,每个object对应一个6DOF位姿
划分:每个物体200张图片用于训练;
误差指标:ADD(-S) 和 n°, n cm
nuScenes数据集:1000条序列,每条序列40张关键帧,每个关键帧有来自环视相机的6张RGB图,包含覆盖10种类别的超过140万个3D bounding box
划分:700/150/150 对应 训练/验证/测试
误差指标:mAP、Average Translation Error (ATE), Average Scale Error (ASE), Average Orientation Error (AOE), Average Velocity Error (AVE) and Average Attribute Error (AAE). Finally, there is a nuScenes detection score (NDS)
1.7 还会存在什么问题?
2 主要内容
任务:给定一张含有 3D 物体投影的图像,确定物体坐标系到相机坐标系的刚体变换
输入:一张图片
输出:由学习到的2D-3D对应关系表出的位姿概率分布![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-6.png)
2.1 PnP
确定:图像坐标系下N个2D点+物体坐标系下N个3D点+各对点的关联权重;求解:物体坐标系到图像坐标系的位姿变换
最小化重投影误差得到最优位姿解y:
a
r
g
m
i
n
y
=
1
2
∑
i
=
1
N
∣
∣
w
i
2
D
∘
(
π
(
R
x
i
3
D
+
t
)
−
x
i
2
d
)
∣
∣
2
=
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
\underset{y}{argmin} = \frac{1}{2}\sum\limits_{i=1}^{N}||w_i^{2D}\circ(\pi(Rx_i^{3D}+t)-x_i^{2d})||^2 = \frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2
yargmin=21i=1∑N∣∣wi2D∘(π(Rxi3D+t)−xi2d)∣∣2=21i=1∑N∣∣fi(y)∣∣2定义最大似然函数
p
(
X
∣
y
)
p(X|y)
p(X∣y),表示事件X(2D-3D匹配)发生的情况下对于位姿y的似然,似然函数最大值处对应最合理的位姿y:
p
(
X
∣
y
)
=
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
p(X|y) = exp -\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2
p(X∣y)=exp−21i=1∑N∣∣fi(y)∣∣2在没有任何先验知识的情况下,位姿的后验概率为似然函数的归一化:
p
(
y
∣
X
)
=
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
∫
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
d
y
p(y|X) = \frac{exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2}{\int exp -\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2\ dy}
p(y∣X)=∫exp−21i=1∑N∣∣fi(y)∣∣2 dyexp−21i=1∑N∣∣fi(y)∣∣2该位姿后验概率形似SoftMax在连续域上的推广:
S
o
f
t
M
a
x
(
α
i
)
=
e
x
p
α
i
∑
j
e
x
p
α
j
SoftMax(\alpha_i) = \frac{exp\ \alpha_i}{\sum_j exp\ \alpha_j}
SoftMax(αi)=∑jexp αjexp αi
2.2 KL散度
用于表出误差
KL散度表示两个几率分布P和Q差别的非对称性的度量。一般情况下,用一个近似的分布Q对一个分布P进行建模,如果我们使用 q(x) 来建立一个编码体系,用来把 x 的值传给接收者,那么由于我们使用了q(x)而不是真实分布p(x),平均编码长度比用真实分布p(x)进行编码增加的信息量(单位是 nat )为:
K
L
(
p
∣
∣
q
)
=
−
∫
p
(
x
)
l
o
g
q
(
x
)
p
(
x
)
d
x
=
∫
p
(
x
)
l
o
g
p
(
x
)
d
x
−
∫
p
(
x
)
l
o
g
q
(
x
)
d
x
KL(p||q) = -\int p(x)log\frac{q(x)}{p(x)}dx = \int p(x)log\ p(x) dx -\int p(x)log\ q(x)dx
KL(p∣∣q)=−∫p(x)logp(x)q(x)dx=∫p(x)log p(x)dx−∫p(x)log q(x)dx用真实的位姿概率分布
t
(
y
)
t(y)
t(y)和构建的位姿概率分布
p
(
y
∣
X
)
p(y|X)
p(y∣X)之间的KL散度表示训练误差
D
K
L
(
t
(
y
)
∣
∣
p
(
y
∣
X
)
)
D_{KL}(t(y)||p(y|X))
DKL(t(y)∣∣p(y∣X)):(原论文中只有最后一个式子,中间过程为我自己的推导,可能存在问题)
D
K
L
(
t
(
y
)
∣
∣
p
(
y
∣
X
)
)
=
∫
t
(
y
)
l
o
g
t
(
y
)
d
y
−
∫
t
(
y
)
l
o
g
p
(
y
∣
X
)
d
y
D_{KL}(t(y)||p(y|X)) = \int t(y)log\ t(y)dy - \int t(y)log\ p(y|X)dy
DKL(t(y)∣∣p(y∣X))=∫t(y)log t(y)dy−∫t(y)log p(y∣X)dy由于第一项是确定值,故损失函数可以不包含这一部分,则有:
L
K
L
=
−
∫
t
(
y
)
l
o
g
p
(
X
∣
y
)
∫
p
(
X
∣
y
)
d
y
d
y
L_{KL}=-\int t(y)log\frac{p(X|y)}{\int p(X|y)dy}dy
LKL=−∫t(y)log∫p(X∣y)dyp(X∣y)dy
=
∫
t
(
y
)
l
o
g
(
∫
(
p
(
X
∣
y
)
d
y
)
d
y
−
∫
t
(
y
)
l
o
g
p
(
X
∣
y
)
d
y
= \int t(y)log(\int(p(X|y)dy)dy - \int t(y)log\ p(X|y)dy
=∫t(y)log(∫(p(X∣y)dy)dy−∫t(y)log p(X∣y)dy最终得到由似然表示的损失函数,此时将真实的位姿概率分布设定为一个类似脉冲函数的g.t.,则有:
L
K
L
=
−
l
o
g
p
(
X
∣
y
g
t
)
+
l
o
g
∫
p
(
X
∣
y
)
d
y
L_{KL}= -log\ p(X|y_{gt}) + log\int p(X|y)dy
LKL=−log p(X∣ygt)+log∫p(X∣y)dy
=
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
g
t
)
∣
∣
2
+
l
o
g
∫
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
d
y
= \frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y_{gt})||^2 + log\int exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2dy
=21i=1∑N∣∣fi(ygt)∣∣2+log∫exp−21i=1∑N∣∣fi(y)∣∣2dy第一项
L
t
a
r
g
e
t
=
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
g
t
)
∣
∣
2
L_{target}=\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y_{gt})||^2
Ltarget=21i=1∑N∣∣fi(ygt)∣∣2表示在目标位姿处的重投影误差,反映了在真值处的表现能力,在其他相似工作的论文中长作为损失函数
第二项
L
p
r
e
d
i
c
t
=
l
o
g
∫
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
d
y
L_{predict}=log\int exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2dy
Lpredict=log∫exp−21i=1∑N∣∣fi(y)∣∣2dy对应
p
(
y
∣
X
)
p(y|X)
p(y∣X)的分母,反映了在各个位姿处的表现能力,是完成端到端训练的关键;![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-7.png)
根据链式求导法则,上式loss函数的偏导数形式为:
∂
L
K
L
∂
(
⋅
)
=
∂
∂
(
⋅
)
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
g
t
)
∣
∣
2
+
1
∫
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
d
y
∗
∫
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
∗
∂
∂
(
⋅
)
(
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
)
d
y
\frac{\partial L_{KL}}{\partial(\cdot)} = \frac{\partial}{\partial(\cdot)} \frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y_{gt})||^2 + \frac{1}{\int exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2dy}*\int exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2\ *\frac{\partial}{\partial(\cdot)}(-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2)dy
∂(⋅)∂LKL=∂(⋅)∂21i=1∑N∣∣fi(ygt)∣∣2+∫exp−21i=1∑N∣∣fi(y)∣∣2dy1∗∫exp−21i=1∑N∣∣fi(y)∣∣2 ∗∂(⋅)∂(−21i=1∑N∣∣fi(y)∣∣2)dy
=
∂
∂
(
⋅
)
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
g
t
)
∣
∣
2
−
E
y
∼
p
(
y
∣
X
)
∂
∂
(
⋅
)
(
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
)
= \frac{\partial}{\partial(\cdot)} \frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y_{gt})||^2 - \underset{y\sim p(y|X)}{\mathbb{E}}\frac{\partial}{\partial(\cdot)}(\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2)
=∂(⋅)∂21i=1∑N∣∣fi(ygt)∣∣2−y∼p(y∣X)E∂(⋅)∂(21i=1∑N∣∣fi(y)∣∣2)第一项
∂
∂
(
⋅
)
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
g
t
)
∣
∣
2
\frac{\partial}{\partial(\cdot)} \frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y_{gt})||^2
∂(⋅)∂21i=1∑N∣∣fi(ygt)∣∣2表示在目标位姿处的重投影误差梯度;
第二项
−
E
y
∼
p
(
y
∣
X
)
∂
∂
(
⋅
)
(
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
)
- \underset{y\sim p(y|X)}{\mathbb{E}}\frac{\partial}{\partial(\cdot)}(\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2)
−y∼p(y∣X)E∂(⋅)∂(21i=1∑N∣∣fi(y)∣∣2)表示重投影误差的在预测的位姿分布上的梯度期望;
以参数匹配权重
w
i
2
D
w_i^{2D}
wi2D为例,其关于重投影误差的偏导数为:
∂
∂
(
w
i
2
D
)
1
2
∑
j
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
=
∂
∂
(
w
i
2
D
)
1
2
∑
j
=
1
N
∣
∣
w
j
2
D
∘
(
π
(
R
x
j
3
D
+
t
)
−
x
j
2
d
)
∣
∣
2
\frac{\partial}{\partial(w_i^{2D})}\frac{1}{2}\sum\limits_{j=1}^{N}||f_i(y)||^2 = \frac{\partial}{\partial(w_i^{2D})}\frac{1}{2}\sum\limits_{j=1}^{N}||w_j^{2D}\circ(\pi(Rx_j^{3D}+t)-x_j^{2d})||^2
∂(wi2D)∂21j=1∑N∣∣fi(y)∣∣2=∂(wi2D)∂21j=1∑N∣∣wj2D∘(π(Rxj3D+t)−xj2d)∣∣2
=
w
i
2
D
∘
∣
∣
π
(
R
x
j
3
D
+
t
)
−
x
j
2
d
∣
∣
2
= w_i^{2D} \circ ||\pi(Rx_j^{3D}+t)-x_j^{2d}||^2
=wi2D∘∣∣π(Rxj3D+t)−xj2d∣∣2
=
w
i
2
D
∘
r
i
(
y
)
2
= w_i^{2D} \circ r_i(y)^2
=wi2D∘ri(y)2有
w
i
2
D
w_i^{2D}
wi2D关于loss函数的重投影误差的负梯度为:
−
∂
L
K
L
∂
(
w
i
2
D
)
=
w
i
2
D
∘
(
−
r
i
(
y
g
t
)
2
+
E
y
∼
p
(
y
∣
X
)
r
i
(
y
)
2
)
-\frac{\partial L_{KL}}{\partial(w_i^{2D})}= w_i^{2D} \circ (-r_i(y_{gt})^2+\underset{y\sim p(y|X)}{\mathbb{E}}r_i(y)^2)
−∂(wi2D)∂LKL=wi2D∘(−ri(ygt)2+y∼p(y∣X)Eri(y)2)第一项
−
r
i
(
y
g
t
)
2
-r_i(y_{gt})^2
−ri(ygt)2表示在真值处重投影误差较大的点的权重需要降低,这些点往往对应图像中物体之外的点,对应下图中的uncertainty;
第二项
E
y
∼
p
(
y
∣
X
)
r
i
(
y
)
2
)
\underset{y\sim p(y|X)}{\mathbb{E}}r_i(y)^2)
y∼p(y∣X)Eri(y)2)表示在不同位姿处误差变化明显的点的权重需要增加,这些点往往对应图像中物体的边缘,因为这些地方对位姿变化很敏感,对应下图中的discrimination;![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-8.png)
2.3 Monte Carlo 位姿误差
用于完成积分计算
2.3.1 蒙特卡洛方法
∫
a
b
F
(
x
)
d
x
≈
1
N
∑
i
=
1
N
F
(
x
i
)
P
(
x
i
)
\int _a^b F(x)dx \approx \frac{1}{N}\sum \limits_{i=1}^{N}\frac{F(x_i)}{P(x_i)}
∫abF(x)dx≈N1i=1∑NP(xi)F(xi)对于正常的积分有:
∫
a
b
F
(
x
)
d
x
=
l
i
m
N
→
∞
b
−
a
N
∑
i
=
1
N
F
(
x
i
)
=
l
i
m
N
→
∞
1
N
∑
i
=
1
N
F
(
x
i
)
1
b
−
a
\int _a^b F(x)dx = \underset{N\rightarrow\infin}{lim}\frac{b-a}{N}\sum \limits_{i=1}^{N}{F(x_i)}=\underset{N\rightarrow\infin}{lim}\frac{1}{N}\sum \limits_{i=1}^{N}\frac{F(x_i)}{\frac{1}{b-a}}
∫abF(x)dx=N→∞limNb−ai=1∑NF(xi)=N→∞limN1i=1∑Nb−a1F(xi)即在蒙特卡洛方法中将
P
(
x
i
)
P(x_i)
P(xi)定义为均匀分布且采样次数趋向于无穷时即为积分的定义,由于N无法趋向于无穷,故为积分的近似。
对于概率分布
P
(
x
i
)
P(x_i)
P(xi),如果能够给出与
F
(
x
i
)
F(x_i)
F(xi)近似的分布函数,可以在相同采样次数N的情况下大大提高近似的精度。![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-9.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-10.png)
2.3.2 蒙特卡洛位姿误差
对于误差中的第二项用蒙特卡洛方法近似计算积分,
v
j
v_j
vj表示位姿
y
j
y_j
yj的重要性权重
L
p
r
e
d
i
c
t
=
l
o
g
∫
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
d
y
L_{predict}=log\int exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2dy
Lpredict=log∫exp−21i=1∑N∣∣fi(y)∣∣2dy
≈
l
o
g
1
K
∑
j
=
1
N
e
x
p
−
1
2
∑
i
=
1
N
∣
∣
f
i
(
y
)
∣
∣
2
q
(
y
i
)
=
l
o
g
1
K
∑
j
=
1
N
v
j
\approx log \frac{1}{K}\sum \limits_{j=1}^{N}\frac{exp-\frac{1}{2}\sum\limits_{i=1}^{N}||f_i(y)||^2}{q(y_i)}=log\frac{1}{K}\sum \limits_{j=1}^{N}v_j
≈logK1j=1∑Nq(yi)exp−21i=1∑N∣∣fi(y)∣∣2=logK1j=1∑Nvj![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-11.png)
2.4 导数正则化
推理过程中仍然需要知道通过PnP直接求解得到的位姿
y
⋆
y^\star
y⋆,首先对于计算得到的
y
⋆
y^\star
y⋆,通过高斯牛顿方法计算:
Δ
y
=
−
(
J
T
J
+
ε
I
)
−
1
J
T
F
(
y
⋆
)
\Delta y = -(J^TJ+\varepsilon I)^{-1}J^TF(y^{\star})
Δy=−(JTJ+εI)−1JTF(y⋆)
Δ
y
\Delta y
Δy在
y
⋆
y^\star
y⋆到达局部最小值时应为0,此时利用
Δ
y
\Delta y
Δy构建正则化误差:
L
r
e
g
=
l
(
y
⋆
+
Δ
y
,
y
g
t
)
L_{reg} = l(y^{\star}+\Delta y, y_{gt})
Lreg=l(y⋆+Δy,ygt)即希望
Δ
y
\Delta y
Δy能够将PnP的解指向真实的位姿;
2.5 网络测试
2.5.1 Dense Correspondence Network
基于CDPN做出小改动,原网络旋转变换R和平移变换T由两个Head给出,作者将其替换为一个head,统一使用PnP计算;
输入:单帧图片,有对应的2d坐标
x
2
D
x^{2D}
x2D;
输出:①3D坐标
x
3
D
x^{3D}
x3D+②两通道的confidence map(对应
x
2
D
x^{2D}
x2D),通过Softmax和global scale得到weight map;
此处②的改动中,Softmax将一个绝对的对应权重转换为一个相对的关系,同时global scale表示了对于预测分布的全局集中度,保证KL散度误差可以更好地收敛,在实验结果中有声明没有softmax不会收敛;![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-12.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-13.png)
实验结果比较:![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-14.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-15.png)
2.5.2 Deformable Correspondence Network
基于FCOS3D做出更改,FCOS3D是一个one-stage detector直接生成一系列信息,作者保留head的结果用于生成object queries(embedding point+reference point)而不是直接预测位姿;![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-16.png)
一个多头的attention layer从稠密的特征中采样得到point特征,然后聚合成object特征;
point特征经过一个subnet预测出3D点和对应的权重,其中3D点坐标是在归一化的object坐标系下的,没有尺度;
object特征用于预测object级别的参数(3D定位socre、权重、尺寸、速度等);![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-17.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-18.png)
3 实验结果
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-19.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-20.png)
![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-21.png) 文章来源:https://www.toymoban.com/news/detail-435594.html
文章来源:https://www.toymoban.com/news/detail-435594.html
3 疑问
①为什么位姿最优解在反向传播中不可导?
答:由于argmin函数是不可导的,如下图所示:
argmin的作用:对于一组2D-3D匹配X,存在一组与pose相关的损失函数,argmin会到达损失函数极小值对应的位姿;
损失函数的特点:由2D-3D匹配X确定,存在多个局部最小值,分别对应多个pose
不可导的体现:在训练过程中,会导致2D-3D匹配变化
Δ
X
\Delta X
ΔX,这导致损失函数的形状发生变化,当一个局部最小值取代成为全局最小值的时候,argmin对于
Δ
X
\Delta X
ΔX表现出不连续![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-22.png)
②位姿积分是怎么做的?
答:使用蒙特卡洛方法近似;
③怎么用重要性权重更新位姿分布?![[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...](https://imgs.yssmx.com/Uploads/2023/05/435594-23.png)
④boungding box、深度、尺寸等信息出现的原理是什么?(不是本篇文章的内容)文章来源地址https://www.toymoban.com/news/detail-435594.html
到了这里,关于[文章阅读] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object ...的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!