目录
一、ESP32红外解码
二、ESP32舵机控制
三、ESP32红外控制舵机
结语
ESP32作为一款功能强大的单片机,常被应用于物联网、智能家居、智能硬件等领域。与其他单片机相比,ESP32具有更高的运行速度和更强的通信能力。下面,我们将介绍ESP32如何实现红外解码,以及如何控制舵机,最后将红外解码和舵机联合起来,实现ESP32红外控制舵机的功能。
一、ESP32红外解码
红外解码是一种将红外信号转换为数字信号的过程,它是将红外信号解析为计算机可识别的数字信号,从而使计算机能够对用户的指令进行处理,并通过其他设备执行相应的任务。ESP32可以通过引入红外解码库来实现红外解码。
在ESP32上,常用的红外解码库有IRremoteESP8266和IRremote。其中IRremoteESP8266库是基于IRremote库进行修改的,具有更高的效率和更强的稳定性。当红外信号被发射器发送出去后,接收器可以将红外信号接收并转成二进制信号。ESP32 使用红外接收器接收红外信号,并将其解码为数字信号,可以使用代码实现:
#include <IRremoteESP8266.h>
const int RECV_PIN = 13;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn();
}
void loop()
{
if (irrecv.decode(&results))
{
Serial.println(results.value, HEX);
irrecv.resume();
}
}在上述代码中,首先创建一个IRrecv对象,然后调用enableIRIn函数启用红外解码功能。在loop函数中,调用irrecv.decode函数解码红外信号并将其存储在results.value中,最后通过串口输出结果。
二、ESP32舵机控制
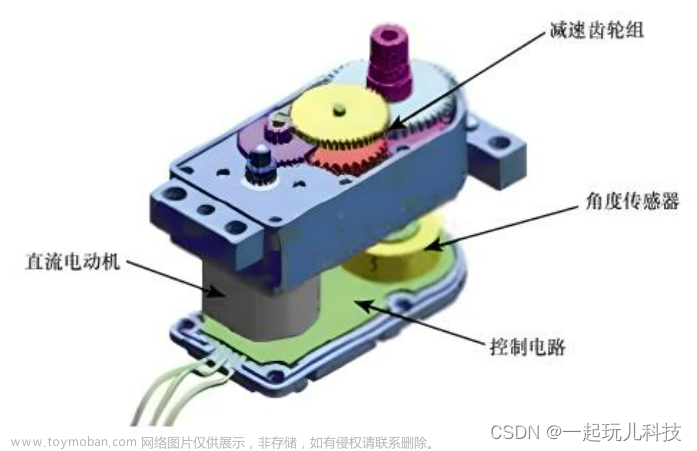
舵机是一种能够转动到特定角度的电机,常见于机器人、模型等领域。ESP32可以通过PWM波形来驱动舵机,以实现舵机的控制。在ESP32上,可以使用ESP32自带的LEDC库来实现PWM波形的输出。
以下是一个简单的ESP32小型代码,用于将舵机控制到特定角度:
#include <driver/ledc.h>
const int pin = 2;
const int freq = 50;
const int channel = 0;
void setup()
{
ledcSetup(channel, freq, 10);
ledcAttachPin(pin, channel);
}
void loop()
{
ledcWrite(channel, 65);
delay(1000);
ledcWrite(channel, 115);
delay(1000);
}在上述代码中,首先在setup函数中通过调用ledcSetup函数设置PWM波形的频率、位数和通道,接着通过ledcAttachPin函数将PWM波形输出到GPIO2上。在loop函数中,通过ledcWrite函数将PWM波形输出到指定通道,从而控制舵机转到特定角度。
三、ESP32红外控制舵机
将ESP32的红外解码和舵机控制结合起来,可以实现ESP32红外控制舵机的功能。具体实现步骤如下:
1. 首先,需要在硬件上连接一个红外接收器模块和一个舵机模块。红外接收器模块将接收到的红外信号传输到ESP32上,ESP32将红外信号解码为数字信号,并将数字信号传输到控制舵机的模块。
2. 在代码实现方面,需要在IRremote库中使用对应的红外解码函数,将接收到的红外信号解码为数字信号。接着,使用LEDC库输出PWM波形,来驱动舵机转到特定角度。
#include <IRremoteESP8266.h>
#include <driver/ledc.h>
const int RECV_PIN = 13;
const int pin = 2;
const int freq = 50;
const int channel = 0;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn();
ledcSetup(channel, freq, 10);
ledcAttachPin(pin, channel);
}
void loop()
{
if(irrecv.decode(&results))
{
Serial.println(results.value, HEX);
irrecv.resume();
if(results.value == 0xFF02FD)
{
ledcWrite(channel, 65);
delay(1000);
ledcWrite(channel, 115);
delay(1000);
}
}
}在上述代码中,首先连接了一个红外接收器模块和一个舵机模块,然后在setup函数中使用irrecv.enableIRIn函数启用红外解码功能,使用ledcSetup和ledcAttachPin函数设置PWM波形的频率和输出通道。在loop函数中,使用irrecv.decode函数对红外信号进行解码,并将解码结果存储在results.value中。接着,如果红外信号为0xFF02FD,则使用ledcWrite函数将PWM波形输出到控制舵机的模块上,从而使舵机转到特定角度。文章来源:https://www.toymoban.com/news/detail-436544.html
结语
本文主要介绍了ESP32如何实现红外解码和舵机控制,并将两者结合起来,实现了ESP32红外控制舵机的功能。通过本文的学习,读者可以掌握ESP32中常用的红外解码库和LEDC库,并能够将它们运用到实际项目中。文章来源地址https://www.toymoban.com/news/detail-436544.html
到了这里,关于ESP32红外控制舵机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!