简介
自动驾驶运动规划中会用到各种曲线,主要用于生成车辆的轨迹,常见的轨迹生成算法,如贝塞尔曲线,样条曲线,以及apollo EM Planner的五次多项式曲线,城市场景中使用的是分段多项式曲线,在EM Planner和Lattice Planner中思路是,都是先通过动态规划生成点,再用5次多项式生成曲线连接两个点(虽然后面的版本改动很大,至少lattice planner目前还是这个方法)。
在这里可以看出5次多项式的作用,就是生成轨迹,这里的轨迹不一定是车行驶的轨迹,比如S—T图中的线,是用来做速度规划的。 如下图:

在apollo里面用到了,3-5次多项式,
- cubic_polynomial_curve1d,三次多项式曲线
- quartic_polynomial_curve1d,四次多项式曲线-
- quintic_polynomial_curve1d,五次多项式曲线
3次多项式
f
(
x
)
=
C
0
+
C
1
x
+
C
2
x
2
+
C
3
x
3
−
−
−
−
(
1
)
f(x) = C_0 + C_1x + C_2x^2+ C_3x^3 ----(1)
f(x)=C0+C1x+C2x2+C3x3−−−−(1)
对x求导====>
f
′
(
x
)
=
C
1
+
2
C
2
x
+
3
C
3
x
2
f'(x) = C_1 + 2C_2x+ 3C_3x^2
f′(x)=C1+2C2x+3C3x2
f
(
x
)
=
2
C
2
+
6
C
3
x
f(x) = 2C_2+ 6C_3x
f(x)=2C2+6C3x
因为是连接两个已知点,所以两个轨迹点的信息是已知的。
如已知,当x=0,代如得:
f
(
0
)
=
C
0
;
f
′
(
0
)
=
C
1
;
f
′
′
(
0
)
=
2
C
2
f(0) = C_0 ; f'(0) = C_1;f''(0) =2C_2
f(0)=C0;f′(0)=C1;f′′(0)=2C2
所以
C
0
=
f
(
0
)
;
C
1
=
f
′
(
0
)
;
C
2
=
f
′
′
(
0
)
/
2
C_0 = f(0);C_1 = f'(0); C_2 = f''(0)/2
C0=f(0);C1=f′(0);C2=f′′(0)/2
将终点 (X_end,f(X_end))带入得到C_3。
C 3 = ( f ( x p ) − C 0 − C 1 x p − C 2 x p 2 ) / x p 3 C_3 = (f(x_p)-C_0-C_1x_p-C_2x_p^2)/x_p^3 C3=(f(xp)−C0−C1xp−C2xp2)/xp3
(1)式的所有未知参数都求出,代入x可以得到两点间的轨迹。
apollo中3次多项式的计算
// cubic_polynomial_curve1d.cc
CubicPolynomialCurve1d::CubicPolynomialCurve1d(const double x0,
const double dx0,
const double ddx0,
const double x1,
const double param) {
ComputeCoefficients(x0, dx0, ddx0, x1, param);
param_ = param;
start_condition_[0] = x0;
start_condition_[1] = dx0;
start_condition_[2] = ddx0;
end_condition_ = x1;
}
void CubicPolynomialCurve1d::ComputeCoefficients(const double x0,
const double dx0,
const double ddx0,
const double x1,
const double param) {
DCHECK(param > 0.0);
const double p2 = param * param;
const double p3 = param * p2;
coef_[0] = x0;
coef_[1] = dx0;
coef_[2] = 0.5 * ddx0;
coef_[3] = (x1 - x0 - dx0 * param - coef_[2] * p2) / p3;
}
5次多项式
f
(
x
)
=
C
0
+
C
1
x
+
C
2
x
2
+
C
3
x
3
+
C
4
x
4
+
C
5
x
5
−
−
−
−
(
3
−
1
)
f(x) = C_0 + C_1x + C_2x^2+ C_3x^3+C_4x^4+C_5x^5 ----(3-1)
f(x)=C0+C1x+C2x2+C3x3+C4x4+C5x5−−−−(3−1)
对x求导====>
f
′
(
x
)
=
C
1
+
2
C
2
x
+
3
C
3
x
2
+
4
C
4
x
3
+
5
C
5
x
4
−
−
−
−
(
3
−
2
)
f'(x) = C_1 + 2C_2x+ 3C_3x^2+4C_4x^3+5C_5x^4----(3-2)
f′(x)=C1+2C2x+3C3x2+4C4x3+5C5x4−−−−(3−2)
f
′
′
(
x
)
=
2
C
2
+
6
C
3
x
+
12
C
4
x
2
+
20
C
5
x
3
−
−
−
−
(
3
−
3
)
f''(x) = 2C_2+ 6C_3x+12C_4x^2+20C_5x^3----(3-3)
f′′(x)=2C2+6C3x+12C4x2+20C5x3−−−−(3−3)
因为是连接两个已知点,所以两个轨迹点的信息是已知的。
如已知,当x=0,代如得:
f
(
0
)
=
C
0
;
f
′
(
0
)
=
C
1
;
f
′
′
(
0
)
=
2
C
2
f(0) = C_0 ; f'(0) = C_1;f''(0) =2C_2
f(0)=C0;f′(0)=C1;f′′(0)=2C2
所以
C
0
=
f
(
0
)
;
C
1
=
f
′
(
0
)
;
C
2
=
f
′
′
(
0
)
/
2
C_0 = f(0);C_1 = f'(0); C_2 = f''(0)/2
C0=f(0);C1=f′(0);C2=f′′(0)/2
将终点 (x_e,f(x_e))带入 (3-1) (3-2) (3-3)。
得到
f
(
x
e
)
=
C
0
+
C
1
x
e
+
C
2
x
e
2
+
C
3
x
e
3
+
C
4
x
e
4
+
C
5
x
e
5
−
−
−
−
(
3
−
4
)
f(x_e) = C_0 + C_1x_e + C_2x_e^2+ C_3x_e^3+C_4x_e^4+C_5x_e^5 ----(3-4)
f(xe)=C0+C1xe+C2xe2+C3xe3+C4xe4+C5xe5−−−−(3−4)
对x求导====>
f
′
(
x
)
=
C
1
+
2
C
2
x
e
+
3
C
3
x
e
2
+
4
C
4
x
e
3
+
5
C
5
x
e
4
−
−
−
−
(
3
−
5
)
f'(x) = C_1 + 2C_2x_e+ 3C_3x_e^2+4C_4x_e^3+5C_5x_e^4----(3-5)
f′(x)=C1+2C2xe+3C3xe2+4C4xe3+5C5xe4−−−−(3−5)
f ′ ′ ( x ) = 2 C 2 + 6 C 3 x e + 12 C 4 x e 2 + 20 C 5 x e 3 − − − − ( 3 − 6 ) f''(x) = 2C_2+ 6C_3x_e+12C_4x_e^2+20C_5x_e^3----(3-6) f′′(x)=2C2+6C3xe+12C4xe2+20C5xe3−−−−(3−6)
联立可得
C
3
=
10
(
f
(
x
p
)
−
1
/
2
∗
f
′
′
(
0
)
x
p
2
−
f
′
(
0
)
x
p
−
f
(
0
)
)
−
4
(
f
′
(
x
p
)
−
f
′
′
(
0
)
x
p
−
f
′
(
0
)
)
x
p
+
1
/
2
∗
(
f
′
′
(
x
p
)
−
f
′
′
(
0
)
)
x
p
2
x
p
3
C_3 = \frac{10(f(x_p)-1/2*f''(0)x_p^2-f'(0)x_p-f(0))-4(f'(x_p)-f''(0)x_p-f'(0))x_p+1/2*(f''(x_p)-f''(0))x_p^2}{x_p^3}
C3=xp310(f(xp)−1/2∗f′′(0)xp2−f′(0)xp−f(0))−4(f′(xp)−f′′(0)xp−f′(0))xp+1/2∗(f′′(xp)−f′′(0))xp2
C 4 = − 15 ( f ( x p ) − 1 / 2 ∗ f ′ ′ ( 0 ) x p 2 − f ′ ( 0 ) x p − f ( 0 ) ) + 7 ( f ′ ( x p ) − f ′ ′ ( 0 ) x p − f ′ ( 0 ) ) x p − 1 / 2 ∗ ( f ′ ′ ( x p ) − f ′ ′ ( 0 ) ) x p 2 x p 4 C_4 = \frac{-15(f(x_p)-1/2*f''(0)x_p^2-f'(0)x_p-f(0))+7(f'(x_p)-f''(0)x_p-f'(0))x_p-1/2*(f''(x_p)-f''(0))x_p^2}{x_p^4} C4=xp4−15(f(xp)−1/2∗f′′(0)xp2−f′(0)xp−f(0))+7(f′(xp)−f′′(0)xp−f′(0))xp−1/2∗(f′′(xp)−f′′(0))xp2
C 5 = 6 ( f ( x p ) − 1 / 2 ∗ f ′ ′ ( 0 ) x p 2 − f ′ ( 0 ) x p − f ( 0 ) ) − 3 ( f ′ ( x p ) − f ′ ′ ( 0 ) x p − f ′ ( 0 ) ) x p + 1 / 2 ∗ ( f ′ ′ ( x p ) − f ′ ′ ( 0 ) ) x p 2 x p 5 C_5 = \frac{6(f(x_p)-1/2*f''(0)x_p^2-f'(0)x_p-f(0))-3(f'(x_p)-f''(0)x_p-f'(0))x_p+1/2*(f''(x_p)-f''(0))x_p^2}{x_p^5} C5=xp56(f(xp)−1/2∗f′′(0)xp2−f′(0)xp−f(0))−3(f′(xp)−f′′(0)xp−f′(0))xp+1/2∗(f′′(xp)−f′′(0))xp2
apollo中5次多项式的计算
void QuinticPolynomialCurve1d::ComputeCoefficients(
const double x0, const double dx0, const double ddx0, const double x1,
const double dx1, const double ddx1, const double p) {
CHECK_GT(p, 0.0);
coef_[0] = x0;
coef_[1] = dx0;
coef_[2] = ddx0 / 2.0;
const double p2 = p * p;
const double p3 = p * p2;
// the direct analytical method is at least 6 times faster than using matrix
// inversion.
const double c0 = (x1 - 0.5 * p2 * ddx0 - dx0 * p - x0) / p3;
const double c1 = (dx1 - ddx0 * p - dx0) / p2;
const double c2 = (ddx1 - ddx0) / p;
coef_[3] = 0.5 * (20.0 * c0 - 8.0 * c1 + c2);
coef_[4] = (-15.0 * c0 + 7.0 * c1 - c2) / p;
coef_[5] = (6.0 * c0 - 3.0 * c1 + 0.5 * c2) / p2;
}
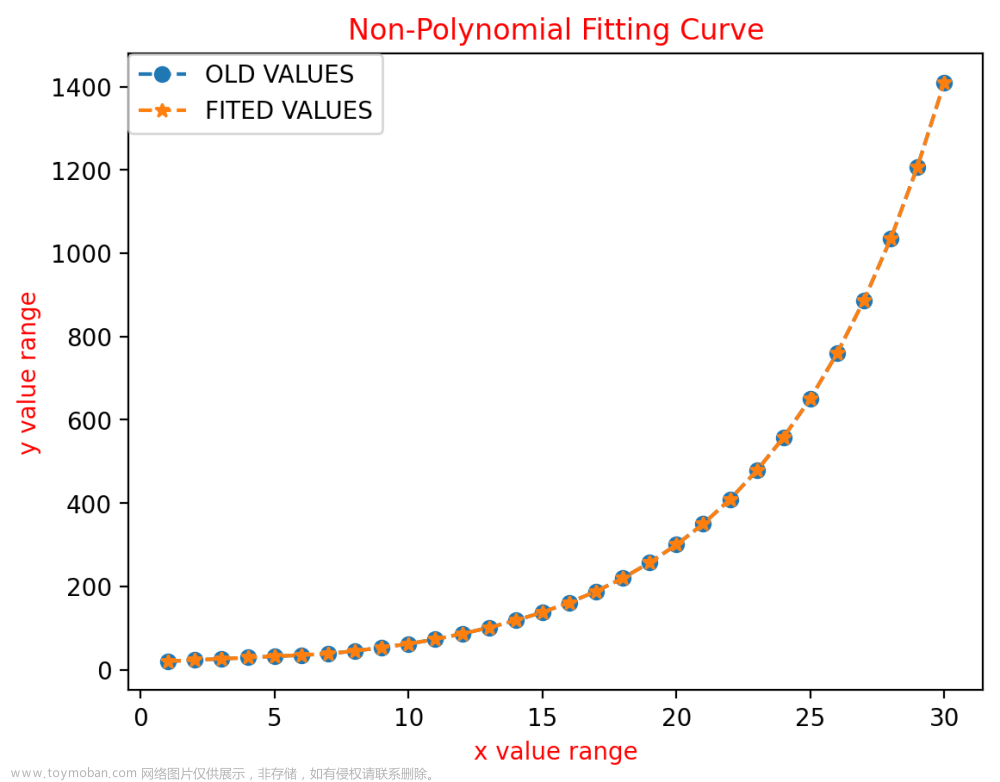
5次多项式拟合
import math
import matplotlib.pyplot as plt
import numpy as np
# parameter
MAX_T = 100.0 # maximum time to the goal [s]
MIN_T = 5.0 # minimum time to the goal[s]
show_animation = True
class QuinticPolynomial:
def __init__(self, xs, vxs, axs, xe, vxe, axe, time):
# calc coefficient of quintic polynomial
# See jupyter notebook document for derivation of this equation.
# 根据初始状态c0 c1 c2
self.a0 = xs # x(t)
self.a1 = vxs # v(t)
self.a2 = axs / 2.0 # a(t)
A = np.array([[time ** 3, time ** 4, time ** 5],
[3 * time ** 2, 4 * time ** 3, 5 * time ** 4],
[6 * time, 12 * time ** 2, 20 * time ** 3]])
b = np.array([xe - self.a0 - self.a1 * time - self.a2 * time ** 2,
vxe - self.a1 - 2 * self.a2 * time,
axe - 2 * self.a2])
# Ax=b 求解x
x = np.linalg.solve(A, b)
# 计算c3 c4 c5
self.a3 = x[0]
self.a4 = x[1]
self.a5 = x[2]
# 根据时间计算点x(t)
def calc_point(self, t):
xt = self.a0 + self.a1 * t + self.a2 * t ** 2 + \
self.a3 * t ** 3 + self.a4 * t ** 4 + self.a5 * t ** 5
return xt
# 计算v(t)
def calc_first_derivative(self, t):
xt = self.a1 + 2 * self.a2 * t + \
3 * self.a3 * t ** 2 + 4 * self.a4 * t ** 3 + 5 * self.a5 * t ** 4
return xt
# 计算a(t)
def calc_second_derivative(self, t):
xt = 2 * self.a2 + 6 * self.a3 * t + 12 * self.a4 * t ** 2 + 20 * self.a5 * t ** 3
return xt
# 计算jerk(t)
def calc_third_derivative(self, t):
xt = 6 * self.a3 + 24 * self.a4 * t + 60 * self.a5 * t ** 2
return xt
def quintic_polynomials_planner(sx, sy, syaw, sv, sa, gx, gy, gyaw, gv, ga, max_accel, max_jerk, dt):
"""
quintic polynomial planner
input
s_x: start x position [m]
s_y: start y position [m]
s_yaw: start yaw angle [rad]
sa: start accel [m/ss]
gx: goal x position [m]
gy: goal y position [m]
gyaw: goal yaw angle [rad]
ga: goal accel [m/ss]
max_accel: maximum accel [m/ss]
max_jerk: maximum jerk [m/sss]
dt: time tick [s]
return
time: time result
rx: x position result list
ry: y position result list
ryaw: yaw angle result list
rv: velocity result list
ra: accel result list
"""
vxs = sv * math.cos(syaw)# 起点速度在x方向分量
vys = sv * math.sin(syaw)# 起点速度在y方向分量
vxg = gv * math.cos(gyaw)# 终点速度在x方向分量
vyg = gv * math.sin(gyaw)# 终点速度在y方向分量
axs = sa * math.cos(syaw)# 起点加速度在x方向分量
ays = sa * math.sin(syaw)# 终点加速度在y方向分量
axg = ga * math.cos(gyaw)# 起点加速度在x方向分量
ayg = ga * math.sin(gyaw)# 终点加速度在y方向分量
time, rx, ry, ryaw, rv, ra, rj = [], [], [], [], [], [], []
for T in np.arange(MIN_T, MAX_T, MIN_T):
xqp = QuinticPolynomial(sx, vxs, axs, gx, vxg, axg, T)
yqp = QuinticPolynomial(sy, vys, ays, gy, vyg, ayg, T)
time, rx, ry, ryaw, rv, ra, rj = [], [], [], [], [], [], []
for t in np.arange(0.0, T + dt, dt):
time.append(t)
rx.append(xqp.calc_point(t))
ry.append(yqp.calc_point(t))
vx = xqp.calc_first_derivative(t)
vy = yqp.calc_first_derivative(t)
v = np.hypot(vx, vy)
yaw = math.atan2(vy, vx)
rv.append(v)
ryaw.append(yaw)
ax = xqp.calc_second_derivative(t)
ay = yqp.calc_second_derivative(t)
a = np.hypot(ax, ay)
if len(rv) >= 2 and rv[-1] - rv[-2] < 0.0:
a *= -1
ra.append(a)
jx = xqp.calc_third_derivative(t)
jy = yqp.calc_third_derivative(t)
j = np.hypot(jx, jy)
if len(ra) >= 2 and ra[-1] - ra[-2] < 0.0:
j *= -1
rj.append(j)
if max([abs(i) for i in ra]) <= max_accel and max([abs(i) for i in rj]) <= max_jerk:
print("find path!!")
break
if show_animation: # pragma: no cover
for i, _ in enumerate(time):
plt.cla()
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.grid(True)
plt.axis("equal")
plot_arrow(sx, sy, syaw)
plot_arrow(gx, gy, gyaw)
plot_arrow(rx[i], ry[i], ryaw[i])
plt.title("Time[s]:" + str(time[i])[0:4] +
" v[m/s]:" + str(rv[i])[0:4] +
" a[m/ss]:" + str(ra[i])[0:4] +
" jerk[m/sss]:" + str(rj[i])[0:4],
)
plt.pause(0.001)
return time, rx, ry, ryaw, rv, ra, rj
def plot_arrow(x, y, yaw, length=1.0, width=0.5, fc="r", ec="k"): # pragma: no cover
"""
Plot arrow
"""
if not isinstance(x, float):
for (ix, iy, iyaw) in zip(x, y, yaw):
plot_arrow(ix, iy, iyaw)
else:
plt.arrow(x, y, length * math.cos(yaw), length * math.sin(yaw),
fc=fc, ec=ec, head_width=width, head_length=width)
plt.plot(x, y)
def main():
sx = 10.0 # start x position [m]
sy = 10.0 # start y position [m]
syaw = np.deg2rad(10.0) # start yaw angle [rad]
sv = 1.0 # start speed [m/s]
sa = 0.1 # start accel [m/ss]
gx = 30.0 # goal x position [m]
gy = -10.0 # goal y position [m]
gyaw = np.deg2rad(20.0) # goal yaw angle [rad]
gv = 1.0 # goal speed [m/s]
ga = 0.1 # goal accel [m/ss]
max_accel = 1.0 # max accel [m/ss]
max_jerk = 0.5 # max jerk [m/sss]
dt = 0.1 # time tick [s]
time, x, y, yaw, v, a, j = quintic_polynomials_planner(
sx, sy, syaw, sv, sa, gx, gy, gyaw, gv, ga, max_accel, max_jerk, dt)
if show_animation: # pragma: no cover
plt.plot(x, y, "-r")
plt.subplots()
plt.plot(time, [np.rad2deg(i) for i in yaw], "-r")
plt.xlabel("Time[s]")
plt.ylabel("Yaw[deg]")
plt.grid(True)
plt.subplots()
plt.plot(time, v, "-r")
plt.xlabel("Time[s]")
plt.ylabel("Speed[m/s]")
plt.grid(True)
plt.subplots()
plt.plot(time, a, "-r")
plt.xlabel("Time[s]")
plt.ylabel("accel[m/ss]")
plt.grid(True)
plt.subplots()
plt.plot(time, j, "-r")
plt.xlabel("Time[s]")
plt.ylabel("jerk[m/sss]")
plt.grid(True)
plt.show()
if __name__ == '__main__':
main()


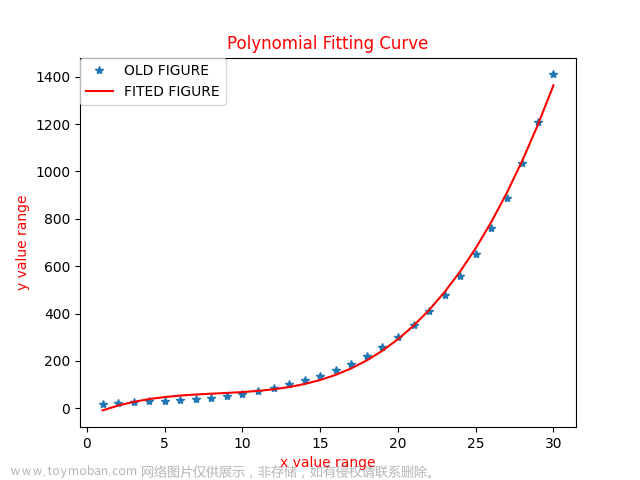
上图模拟了车辆曲线的拟合过程的轨迹,箭头代表方向。
过程的速度
感觉5次多项式和贝塞尔曲线还是挺像的,有时间写一篇五次多项式、贝塞尔曲线、样条曲线的对比。文章来源:https://www.toymoban.com/news/detail-436810.html
还有一个问题就是为啥要用5次多项式,而不是4次,6次更高阶或者低阶呢?下回复习一下老王的讲解。
参考:文章来源地址https://www.toymoban.com/news/detail-436810.html
- https://blog.csdn.net/qq_36458461/article/details/110007656
- https://zhuanlan.zhihu.com/p/567375631
到了这里,关于自动驾驶规划 - 5次多项式拟合的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!