目录
1、PID算法的基本理论
1.1 PID 控制的基本概念
1.2 基本公式
1.3 PID控制系统原理图
2、在simulink中搭建PID控制器模型及调参
3、调参
1、PID算法的基本理论
1.1 PID 控制的基本概念
PID 控制器是一种比例、积分、微分并联控制器。它是最广泛应用的一种控制器。在 PID 控制器中,它的数学模型由比例、积分、微分三部分组成。
1.2 基本公式
PID控制是一种线性控制,它是将给定值与实际值构成的控制偏差:
的比例(P)、积分(I)、微分(D)进行线性组合构成控制量,将被控对象进行控制。其模拟表达式为:
其中:
一控制器的输出。
一控制器输入,它是给定值和被控对象输出值的差,称偏差信号。
一控制器的比例系数。
一控制器的积分时间。
一控制器的微分时间。
传递函数形式为:
上式中,为比例系数,为积分时间常数,为微分时间常数。
1.3 PID控制系统原理图

2、在simulink中搭建PID控制器模型及调参
小罗哥将在simulink中使用两种不同的方法来搭建一个PID控制器来控制一个简单的二阶系统。
在没有添加任何控制器时,我们可以看到这个系统的调节时间较慢,且峰值较高。

(1) 第一种方法是使用simulink提供的Gain、Integrator和Derivative模块,构成PID控制器,再使用Transfer Fcn模块提供传递函数,最终结果使用Scope模块就行观察,在系统中我们输入信号1。
在图中上部分传递函数未使用PID进行控制,在结果中明显可以看出PID控制对整个控制而言改善了很多,达到我们对控制系统快、稳、准的要求。


使用这种方法搭建控制器是比较原始的,其在调节参数时也是需要一定的青经验和时间,在调节参数时我一般先使积分和微分环节为零,先调整比例环节,再使微分环节为零调整积分,将微分放在最后。
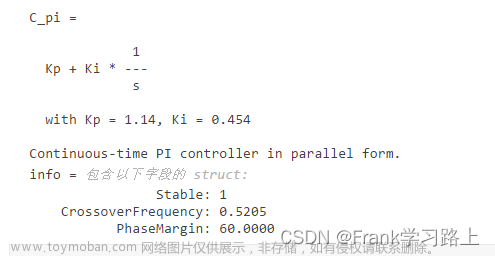
(2) 使用simulink自带的PID 控制模块。
方法(1)对于刚接触PID的大佬来说还是比较麻烦的,所以在simulink中我们可以使用PID模块进行控制,这个模块的唯一好处是可以自动调参。在图中上部分的传递函数是未使用任何控制器的控制系统,而在下部分中我们用到了PID Controller控制器。

我们可以看到,蓝线部分为我们使用PID模块但未进行任何调参处理的图形。

在这里我们可以双击PID模块,选择点击自动调节里的调节按钮 ,MATLAB在打开调节界面使可能会有些慢,请耐心等待。


在这里,我们可以点击重置设计对参数进行自动调节,可以看到,虚线部分为我们原系统未进行任何调节的曲线,而实线部分为使用PID算法得到的曲线,在这个界面我们还可以对响应时间和瞬态特性进行直观地调整,在调整完成之后只需要点击更新模块即可

返回PID模块设置界面我们可以对P、I或者D进行微调,文章最后是我调节参数的一点新得体会。如有不足之处还请各位大佬批评指正。

3、调参
在调节参数时我一般先使积分和微分环节为零,先调整比例环节,再使微分环节为零调整积分,将微分放在最后。
(1)比例环节:成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即有控制作用,使控制量朝着减小偏差的方向变化,控制作用强弱取决于比例系数,越大,则过渡过程越短,控制结果的稳态误差也越小:但越大,超调量也越大,越容易产生振满,导致动态性能变坏,甚至会使闭环系统不稳定。故而,比例系数,选择必须适当,才能取得过渡时间少、稳态误差小而又稳定的效果。
(2)积分环节:主要用于消除偏差,只要存在偏差,则它的控制作用就会不断地积累,输出控制量以消除偏差。可见,积分部分的作用可以消除系统的偏差。可是积分作用具有滞后特性,积分控制作用太强会使系统超调加大,控制的动态性能变差,甚至会使闭环系统不稳定。积分时间对积分部分的作用影响极大。当较大时,则积分作用较弱,这时,有利于系统减小超调,过渡过程不易产生振荡。但是消除误差所需时间较长。较小时,则积分作用较强。这时系统过渡过程中有可能产生振荡,消除误差所需的时间较短。文章来源:https://www.toymoban.com/news/detail-438940.html
(3)微分环节:反映偏差信号的变化趋势,微分控制得出偏差的变化趋势,增大微分控制作用可加快系统响应,减小超调量,克服振荡,提高系统的稳定性,但使系统抑制干扰的能力降低。微分部分的作用强弱由微分时间决定。越大,则它抑制变化的作用越强,越小,它反抗变化的作用越弱。它对系统的稳定性有很大的影响。文章来源地址https://www.toymoban.com/news/detail-438940.html
到了这里,关于基于simulink的PID控制器设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!