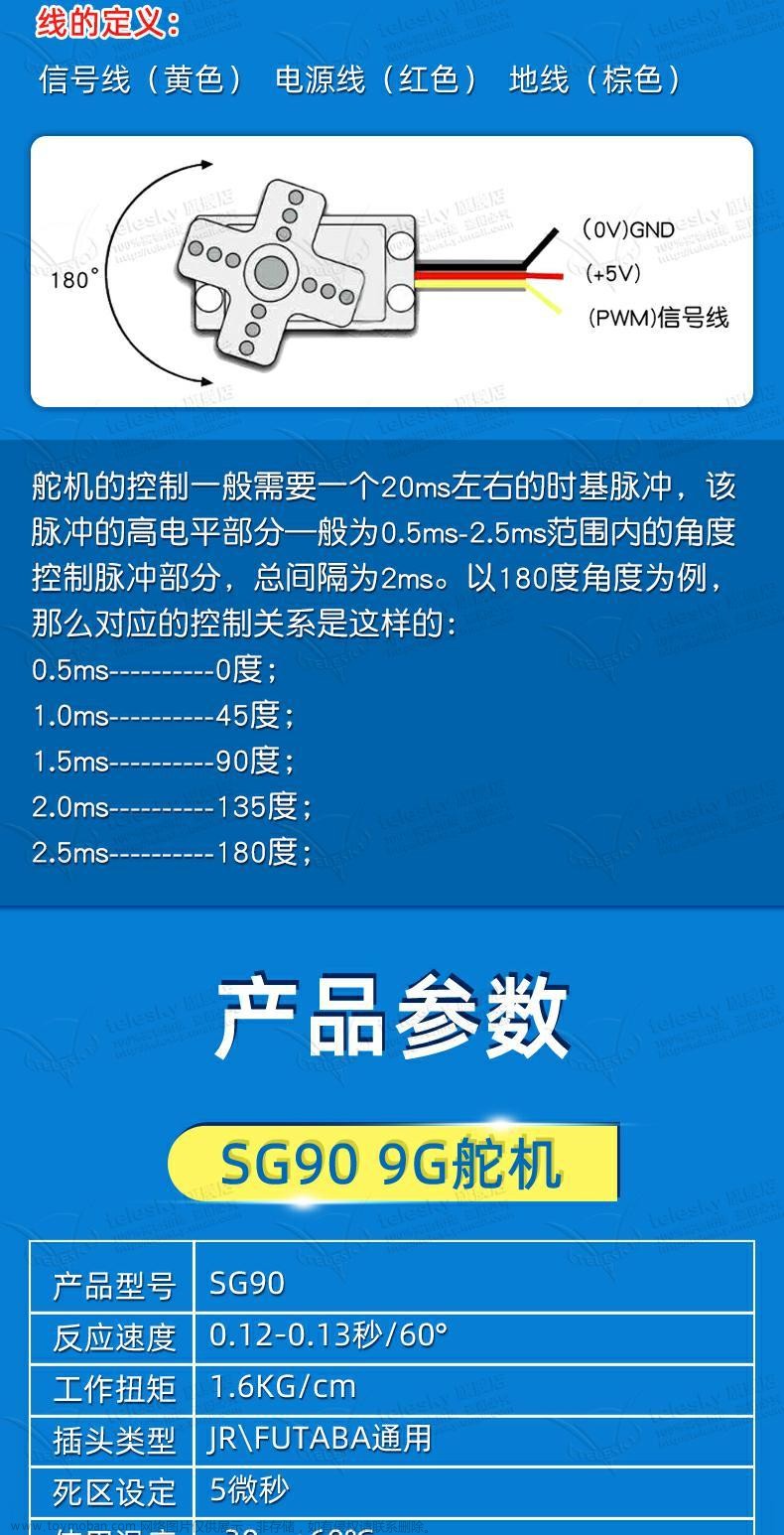
一、SG90舵机介绍
SG90是一种微型舵机,也被称为伺服电机。它是一种小型、低成本的直流电机,通常用于模型和机器人控制等应用中。SG90舵机可以通过电子信号来控制其精确的位置和速度。它具有体积小、重量轻、响应快等特点,因此在各种小型机械设备上得到了广泛应用。
SG90舵机通常用于各种小型机械设备中,例如:
模型控制:SG90舵机可以用于遥控汽车、飞机、船只和其他模型的转向、加速和刹车等控制。
机器人控制:SG90舵机也广泛应用于机器人领域,例如可以控制机器人的头部旋转、臂部移动等。
相机云台:SG90舵机可以用于控制相机的运动,例如实现云台的左右旋转和上下移动。
自动化系统:在一些自动化系统中,SG90舵机可以用来控制小型机械臂或手指的运动。
总之,SG90舵机适用于需要精确定位和紧凑设计的应用场景。

二、普通IO口模拟PWM驱动SG90舵机
以下是一个简单的示例代码,用于通过PB5普通IO口产生模拟PWM信号来控制SG90舵机正向旋转和反向旋转:
#include "stm32f10x.h"
#define PWM_FREQ 50 // 设置PWM信号频率为50Hz
#define SERVO_MIN_PULSE_WIDTH 500 // 舵机最小脉宽500us
#define SERVO_MAX_PULSE_WIDTH 2500 // 舵机最大脉宽2500us
void delay_us(uint32_t us) {
uint32_t count = us * (SystemCoreClock / 1000000) / 9;
while(count--);
}
void servo_rotate(uint16_t pulse_width) {
GPIO_SetBits(GPIOB, GPIO_Pin_5); // 设置PB5输出高电平
delay_us(pulse_width); // 延时等待脉宽结束
GPIO_ResetBits(GPIOB, GPIO_Pin_5); // 设置PB5输出低电平
delay_us(20000 - pulse_width); // 延时保持50Hz的PWM周期
}
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 使能GPIOB时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; // PB5口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 最大输出频率为50Mhz
GPIO_Init(GPIOB, &GPIO_InitStructure);
while(1) {
// 控制舵机正向旋转360°
for (int i = SERVO_MIN_PULSE_WIDTH; i <= SERVO_MAX_PULSE_WIDTH; i += 10) {
servo_rotate(i);
}
for (int i = SERVO_MAX_PULSE_WIDTH; i >= SERVO_MIN_PULSE_WIDTH; i -= 10) {
servo_rotate(i);
}
// 控制舵机反向旋转360°
for (int i = SERVO_MAX_PULSE_WIDTH; i >= SERVO_MIN_PULSE_WIDTH; i -= 10) {
servo_rotate(i);
}
for (int i = SERVO_MIN_PULSE_WIDTH; i <= SERVO_MAX_PULSE_WIDTH; i += 10) {
servo_rotate(i);
}
}
}
在这个代码中,我们首先定义了PWM频率以及舵机的最小和最大脉宽。然后,我们实现了一个延时函数delay_us(),用于产生指定微秒数的延时。接下来,我们实现了一个servo_rotate()函数,用于控制舵机的旋转。
在servo_rotate()函数中,我们将PB5口设置为高电平,并延时等待一段时间,使得舵机旋转到相应的角度;然后将PB5口设置为低电平,延时保持PWM周期的长度,以达到模拟PWM信号的效果。
在主函数中,我们通过循环控制舵机旋转360度,并在正向和反向旋转之间进行切换。具体来说,我们通过循环执行servo_rotate()函数,并改变脉宽的值,实现舵机的旋转。
需要注意的是,这个示例代码只是一个简单的演示,实际使用中可能需要根据舵机的具体型号和应用场景进行调整。同时,由于使用的是延时产生模拟PWM信号,因此控制的精度可能会受到其他因素的影响,如果需要更高的控制精度,可以考虑使用硬件定时器来产生PWM信号。
三、通过定时器输出PWM控制SG90舵机
(1)配置定时器4的通道1为PWM模式,并且设置频率为50Hz,占空比为5%~10%。
代码如下:
// 开启TIM4时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
// 定时器4 PWM模式配置
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 1999; // 72M / (2*2000) = 18KHz
TIM_TimeBaseStructure.TIM_Prescaler = 35; // 分频系数36
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
// 定时器4通道1 PWM输出配置
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 100; // 初始值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
// 开启定时器4
TIM_Cmd(TIM4, ENABLE);
(2)使用定时器4的通道1输出PWM信号,使舵机正向旋转360°,即将占空比由5%10%逐渐增加至12.5%2.5%。代码如下:
for (int i = 100; i <= 250; i += 10) {
TIM_SetCompare1(TIM4, i);
delay_ms(50);
}
(3)使用定时器4的通道1输出PWM信号,使舵机反向旋转360°,即将占空比由12.5%2.5%逐渐减小至5%10%。代码如下:
for (int i = 250; i >= 100; i -= 10) {
TIM_SetCompare1(TIM4, i);
delay_ms(50);
}
在上面的代码中,delay_ms()函数是一个简单的延时函数,用于控制每次占空比变化后等待一段时间再进行下一步操作。需要自己实现这个函数。文章来源:https://www.toymoban.com/news/detail-439005.html
另外,SG90舵机正向旋转和反向旋转的具体占空比可能有所不同,需要根据实际情况调整代码中的占空比值。文章来源地址https://www.toymoban.com/news/detail-439005.html
到了这里,关于STM32F103RCT6驱动SG90舵机-完成正反转角度控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!