文章来源:https://www.toymoban.com/news/detail-439044.html
文章来源:https://www.toymoban.com/news/detail-439044.html
- 🚀 个人简介:CSDN「博客新星」TOP 10 , C/C++ 领域新星创作者
- 💟 作 者:锡兰_CC ❣️
- 📝 专 栏:【OpenCV • c++】计算机视觉
- 🌈 若有帮助,还请关注➕点赞➕收藏,不行的话我再努努力💪💪💪
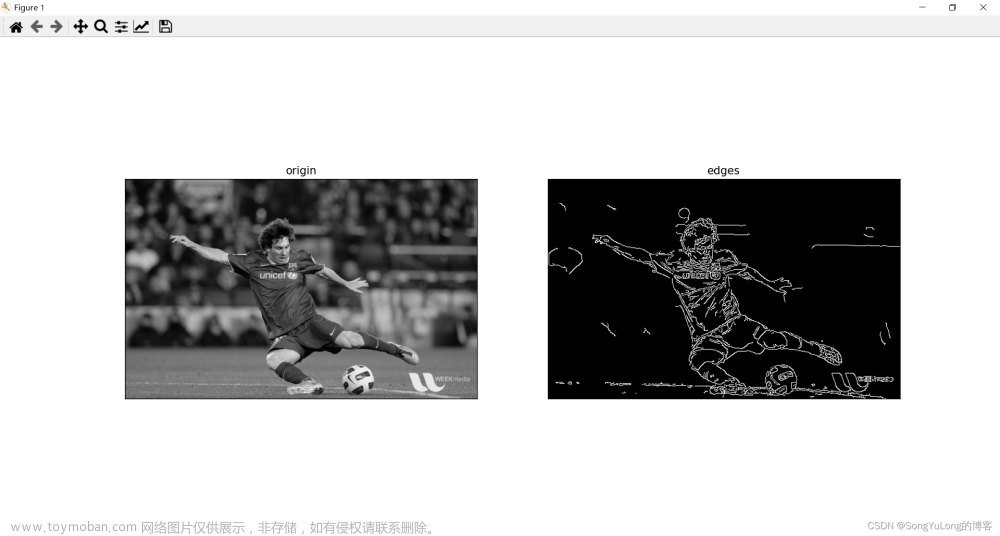
什么是边缘检测
边缘检测是图像处理与计算机视觉中最重要的技术之一,其目的是检测识别出图像中亮度变化剧烈的像素点文章来源地址https://www.toymoban.com/news/detail-439044.html
到了这里,关于【OpenCv • c++】图像识别边缘检测 图像差分运算的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!