PWM

输出比较通道
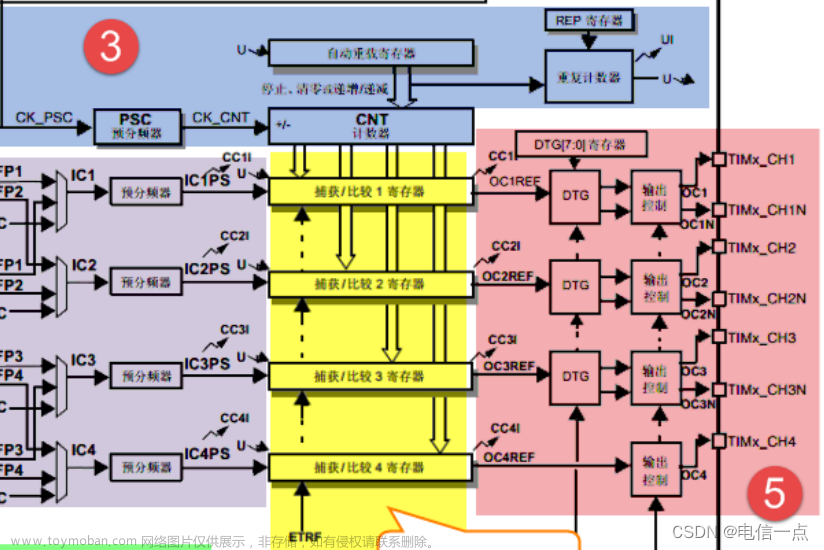
在这里以通用定时器的通道1作为介绍。
如图,左边就是CNT计数器和CCR1第一路的捕获/比较寄存器,它俩进行比较,当CNT>CCR1,
或者CNT=CCR1时,就会给输出模式控制器传送一个信号,然后输出模式控制器就会改变它的
输出OC1ref的高低电平(这里ref是referencel的缩写,意思是参考信号)。
上面还有个ETRF输入,这个是定时器的一个小功能,一般不用。
接着这个ref信号有两条路可以走,一路可以前往主模式控制器,把这个ref信号映射到主模式的
TRGO输出上去。而另一路先到达极性选择模块,由寄存器TIMx_CCER控制,给TIMx_CCER的
CC1P写0,信号往上走,输入信号不反相;写1,信号就会往下走,信号会通过一个非门取反,
那输出的信号就是输入信号高低电平反转的信号。
接着就是输出使能电路,选择要不要输出,由寄存器TIMx_CCER的CC1E控制。
最后就是0C1引脚,这个引脚就是CH1通道的引脚。
输出比较模式
输出比较模式的选择是通过改变输出模式控制器的执行逻辑实现的,由寄存器TIMx_CCMR1的OC1M控制。
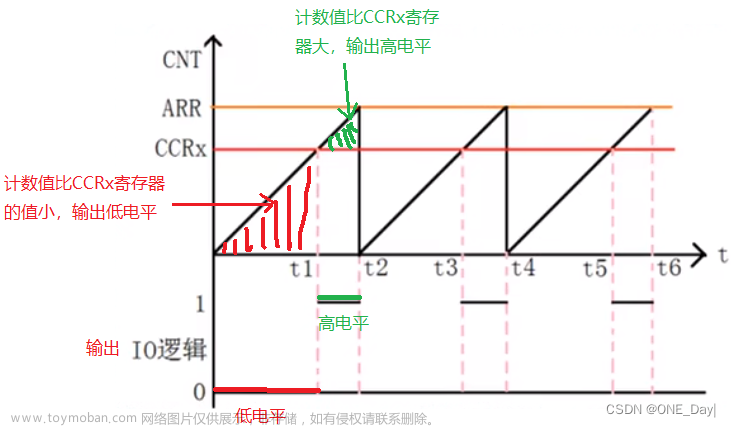
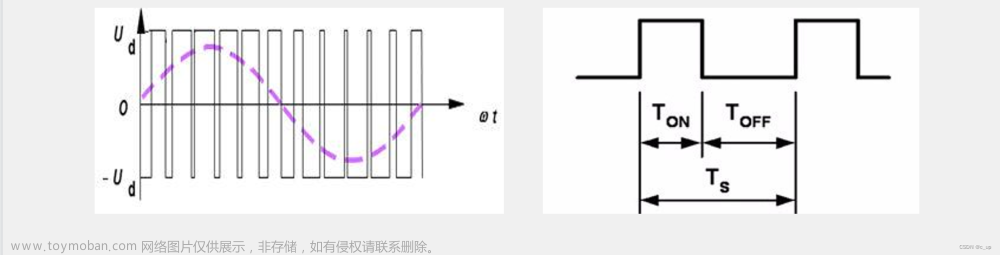
输出比较模式总共有8种,我们这里只介绍最常用的PWM模式。PWM输出就是对外输出脉宽(即占空比)可调的方波信号,信号频率由自动重装寄存器ARR的值决定,占空比由比较寄存器CCR的值决定。PWM模式分为两种,PWM1和PWM2,总得来说是差不多的。
配置好了时基单元,CNT就开始不断地自增运行了。然后就是输出比较单元,总共有四路。输出比较单元的最开始是CCR,它的值由我们自己设定,CNT不断自增运行,同时与CCR进行比较。后面就是输出模式控制器,以PWM模式1向上计数为例,CNT小于CCR时,REF置有效电平,CNT大于等于CCR时,REF置无效电平。再经过极性选择,使能输出,最终通向GPIO口,输出波形。
PWM波的实现:
如上图右上角所示,CNT从O开始自增,一直增到ARR(这里值为99),之后清零继续自增。设定下面绿色线为输出状态,在这个过程中,CNT小于CCR(这里值为30),输出置高电平,反之,置低电平。这样一直持续下去,REF的电平就会不断变化,
PWM参数计算:
1.PWM频率:Freq=CK_PSC/(PSC+1)/(ARR+1)
2.PWM占空比:Duty=CCR/(ARR+1)
3.PWM分辨率:Reso=1/(ARR+1)
PWM的周期对应着计数器的溢出更新周期,所以PWM的频率就等于计数器的更新频率。
分辨率就是占空比变化的步距。CCR的值应该设置在O到ARR+1这个范围里,当CCR=ARR+1
时,占空比刚好为100%。如果CCR再大一些,占空比依然为100%,没有意义。所以CCR的变化范围取决于ARR的值,ARR越大,CCR的范围就越大,对应的分辨率就越大。对于同一个定时器的不同通道输出的PWM,因为不同通道是共用一个计数器的,所以它们的频率是一样的。而它们的占空比是由各自的CC决定的,所以占空比可以各自设定它们的相位,由于计数器更新,所有PWM同时跳变,所以它们的相位是同步的.
区别
PWM1中空控制的是高电平的占空比,外接LED的时候灯光是随着TIMx_SetComparex()函数中占空比的增大由最亮逐渐变最暗,当达到100%的占空比的时候最暗。
PWM2中空控制的是低电平的占空比,外接LED的时候灯光是随着TIMx_SetComparex()函数中占空比的增大由最暗逐渐变最亮,当达到100%的占空比的时候最亮
输出极性
PWM模式1-*在向上计数时,*一旦TIMx_CNT<TIMx_CCR1时,通道1为有效电平,否则为无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时,通道Q1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
PWM模式2-*在向上计数时,一旦TIMx_CNT<TIMx_CCR1时,通道1为无效电平,*否则为有效电平;在向下计数时,一旦TIMx CNT>TIMx CCR1时,通道1为有效电平,否则为无效电平
输出比较极性,指的是你在比较匹配之后输出口(比如LED灯)输出的极性。
就是让你设置LED灯有效极性,你可以设置为高电平有效或者低电平有效
理解后,正题开始:
首先只看向上计数,别的都不看。
再看下面的图:
根据上面的图举例,正点原子板子上的LED灯一股都是低电平有效,而我们想达到的效果是随着占空比的增加(向上计数模式),灯的亮
度增加(低电平)。
根据上面的图,能实现的方式有两种:
1.低极性,PWM1
2.高极性,PWM2
如果我们自己画的板子,硬件LED设计是高电平有效,那么就是随着占空比的增加(向上计数模式),灯的亮度增加(高电平)。
根据上面的图,能实现的方式有两种:
1.高极性,PM12.低极性,PWM2
输出极性
http://www.openedv.com/forum.php?mod=viewthread&tid=285008&highlight=%CA%E4%B3%F6%BC%AB%D0%D4文章来源:https://www.toymoban.com/news/detail-439074.html
定义:TIM_OCNPolarity_High为高极性
TIM_OCNPolarity_Low为低极性
110:PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为
无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否
则为有效电平(OC1REF=1)。
111:PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为
有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电
平
首先要先理解好这一句话:
当PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时
通道1为无效电平,否则为有效电平;
TIM_SetCompare2(TIM3,0);
1)为什么在高极性时,灯会灭呢
因为TIMx_CNT<TIMx_CCR1,通道1为无效电平
战舰板的LED是低电平亮,而TIM_SetCompare2(TIM3,0);即TIMx_CCR1的值为0,也就是TIMx_CCR1
<=TIM3_CNT时通道2输出是高电平
不符合LED灯低电平亮,LED灯是不亮的。
2)那么把高极性改为低极性,为什么灯会亮
如TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
因为CC1P=0时:OC1高电平有效 TIM_OCNPolarity_High
CC1P=1时:OC1低电平有效 TIM_OCNPolarity_Low
由于低极性输出的是低电平有效所以灯可以点亮
3)为什么把PWM2改成了PWM1,别的什么都没动,灯就亮了
“PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平”
4)考虑到设置CCR的值设置为300到500效果不是很明显
所以CCR取0和899,可以直接看出效果现象文章来源地址https://www.toymoban.com/news/detail-439074.html
到了这里,关于STM32F4的输出比较极性和PWM1,PWM2的关系的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!