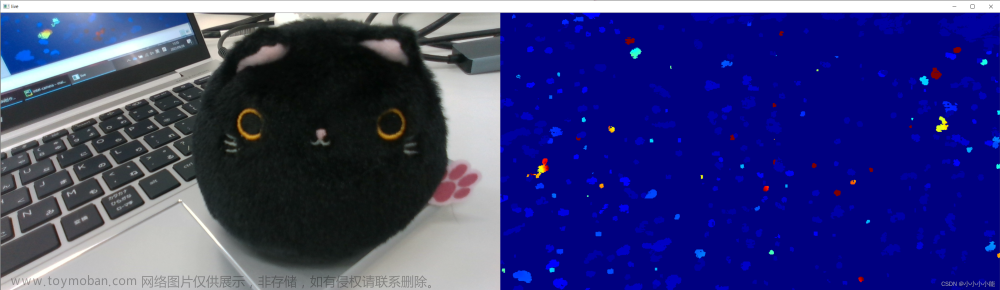
一、效果演示
- Colorimage:

- Colorimage and depthimage:

二、环境配置
1.一个可以运行YOLOv5的python环境
pip install -r requirements.txt
2.一个realsense相机和pyrealsense2库
pip install pyrealsense2
在下面两个环境中测试成功
-
win10 python 3.8 Pytorch 1.10.2+gpu CUDA 11.3 NVIDIA GeForce MX150
-
ubuntu16.04 python 3.6 Pytorch 1.7.1+cpu
三、模型配置
修改模型配置文件,以yolov5s为例。
如果使用自己训练的模型,需要进行相应的修改。
weight: "weights/yolov5s.pt"
# 输入图像的尺寸
input_size: 640
# 类别个数
class_num: 80
# 标签名称
class_name: [ 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush' ]
# 阈值设置
threshold:
iou: 0.45
confidence: 0.6
# 计算设备
# - cpu
# - 0 <- 使用GPU
device: '0'
四、相机配置
分辨率好像只能改特定的参数,不然会报错。d435i可以用 1280x720, 640x480, 848x480。
pipeline = rs.pipeline() # 定义流程pipeline
config = rs.config() # 定义配置config
config.enable_stream(rs.stream.depth, 1280, 720, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 1280, 720, rs.format.bgr8, 30)
profile = pipeline.start(config) # 流程开始
五、部分代码:
下方代码实现从像素坐标系到相机坐标系转换,并且标注中心点以及三维坐标信息。文章来源:https://www.toymoban.com/news/detail-439669.html
for i in range(len(xyxy_list)):
ux = int((xyxy_list[i][0]+xyxy_list[i][2])/2) # 计算像素坐标系的x
uy = int((xyxy_list[i][1]+xyxy_list[i][3])/2) # 计算像素坐标系的y
dis = aligned_depth_frame.get_distance(ux, uy)
camera_xyz = rs.rs2_deproject_pixel_to_point(
depth_intrin, (ux, uy), dis) # 计算相机坐标系xyz
camera_xyz = np.round(np.array(camera_xyz), 3) # 转成3位小数
camera_xyz = camera_xyz.tolist()
cv2.circle(canvas, (ux,uy), 4, (255, 255, 255), 5)#标出中心点
cv2.putText(canvas, str(camera_xyz), (ux+20, uy+10), 0, 1,
[225, 255, 255], thickness=2, lineType=cv2.LINE_AA)#标出坐标
camera_xyz_list.append(camera_xyz)
#print(camera_xyz_list)
六、仓库链接:
代码已上传github:yolov5_d435i_detection
文章来源地址https://www.toymoban.com/news/detail-439669.html
到了这里,关于Realsense D435i Yolov5目标检测实时获得目标三维位置信息的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!