基于方波信号注入的永磁同步电机无传感器控制仿真及其原理介绍
注入的高频方波信号为:
可以得到估计轴的高频响应电流为:
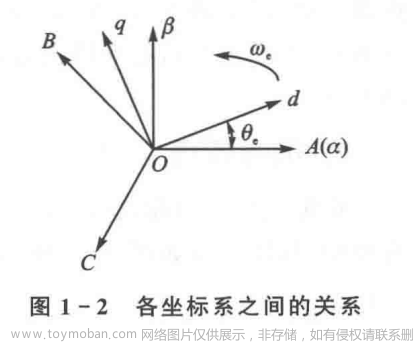
当向定子绕组注入高频电压信号时,所注入的高频信号频率远高于基波信号频率。因此,IPMSM 在a-β轴的电压模型可以表示为:
假定在一个采样周期内,电流线性变化,di/dt等于△i/△t,则可整理为:
转子位置估计框图:


原理就那么多,那么我们放上高频方波电压信号注入的无感仿真框图:


主要是上面圈住的三个点,那么这个simulink我为了简化并没有加MTPA,感兴趣的可以加一下。
下面放上参数以及搭建的模型:
给定转速:

转速环:

function y = fcn(u)
if (abs(u)>300)
y=0;
else
y=1;
end



电流环:


方波注入模块:

逆变器:
电机:
meaument模块:
提取基频信号模型:
位置和转速观测器:
上面那个图的左边的模块:

其中的PI: 文章来源:https://www.toymoban.com/news/detail-439854.html
文章来源:https://www.toymoban.com/news/detail-439854.html
两相静止坐标系提取高频信号(右边模块):
波形结果:
实际转速与估计转速波形:
实际角度与估计角度波形:
给个点赞和关注谢谢!!!!
还有就是模型参数已经给出,除了变换模块和SVPWM模块,你们用你们自己的模型试一下,不行再评论找我要,一般当天就会回复。文章来源地址https://www.toymoban.com/news/detail-439854.html
到了这里,关于基于高频方波电压信号注入的永磁同步电机无传感器控制仿真及其原理介绍的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[FOC-Simulink]使用Simulink代码生成工具基于STM32开发板对永磁同步电机进行开环控制](https://imgs.yssmx.com/Uploads/2024/02/648307-1.png)