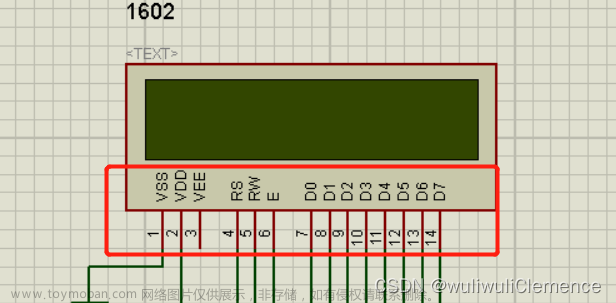
LCD1602(Liquid Crystal Display)是一种工业字符型液晶,能够同时显示 16×02 即 32 字符(16列两行)
第 1 脚: VSS 为电源地
第 2 脚: VDD 接 5V 正电源
第 3 脚: VL 为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度 过高时会产生“鬼影”,使用时可以通过一个
10K 的电位器调整对比度。第 4 脚:RS 为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
第 5 脚:R/W 为读写信号线,高电平时进行读操作,低电平时进行写操作。当 RS 和 R/W 共 同为低电平时可以写入指令或者显示地址,当RS 为低电平 R/W 为高电平时可以读忙信号, 当 RS 为高电平 R/W 为低电平时可以写入数据。
第 6 脚:E 端为使能端,当 E 端由高电平跳变成低电平时,液晶模块执行命令。
第 7-14 脚:D0~D7 为 8 位双向数据线。
第 15 脚:背光源正极。
第 16 脚:背光源负极。


开发逻辑
- 在哪显示

例如第二行第一个字符的地址是 40H,那么是否直接写入 40H 就可以将光标定位在第二行第一个字符的位置呢?这样不行,因为写入显示地址时要求最高位 D7 恒定为高电平 1 所以实际写入的数据应该是 01000000B(40H) +10000000B(80H)=11000000B(C0H)
- 显示什么

读写操作时序
读操作
检测忙信号的时候需要读时序
/*当 RS 为低电平 R/W 为高电平时可以读忙信号读忙信号和光标地址。
BF(bit7):为忙标志位,高电平表示忙,此时模块不能接收命令或者数据,
如果为低电平表示不忙。
*/
void check_busy()//检测忙信号
{
char tmp = 0x80;
dataBuff = 0x80;
while(tmp & 0x80){//检测BF,1忙 0闲
RS = 0;
RW = 1;
EN = 0;
_nop_();
EN = 1;
_nop_();
_nop_();
tmp = dataBuff;
_nop_();
EN = 0;
_nop_();
}
}
写操作
数序参数
/*
RS 为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
*/
void Write_Cmd_Func(char cmd)
{
check_busy();
RS = 0;
RW = 0;
EN = 0;
_nop_();
dataBuff = cmd;
_nop_();
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Write_Data_Func(char dataShow)
{
check_busy();
RS = 1;
RW = 0;
EN = 0;
_nop_();
dataBuff = dataShow;
_nop_();
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
LCD1602的初始化函数
void LCD1602_INIT()
{
//(1)延时 15ms
Delay15ms();
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
Delay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
check_busy();
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
C51实验显示:hello world
#include "reg52.h"
#include "intrins.h"
#define dataBuff P0
sbit RS = P2^6;
sbit RW = P2^5;
sbit EN = P2^7;
/*当 RS 为低电平 R/W 为高电平时可以读忙信号读忙信号和光标地址。
BF(bit7):为忙标志位,高电平表示忙,此时模块不能接收命令或者数据,
如果为低电平表示不忙。
*/
void check_busy()//检测忙信号
{
char tmp = 0x80;
dataBuff = 0x80;
while(tmp & 0x80){//检测BF,1忙 0闲
RS = 0;
RW = 1;
EN = 0;
_nop_();
EN = 1;
_nop_();
_nop_();
tmp = dataBuff;
_nop_();
EN = 0;
_nop_();
}
}
/*
RS 为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
*/
void Write_Cmd_Func(char cmd)
{
check_busy();
RS = 0;
RW = 0;
EN = 0;
_nop_();
dataBuff = cmd;
_nop_();
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Write_Data_Func(char dataShow)
{
check_busy();
RS = 1;
RW = 0;
EN = 0;
_nop_();
dataBuff = dataShow;
_nop_();
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 9;
j = 244;
do
{
while (--j);
} while (--i);
}
void Delay15ms() //@11.0592MHz
{
unsigned char i, j;
i = 27;
j = 226;
do
{
while (--j);
} while (--i);
}
void LCD1602_INIT()
{
//(1)延时 15ms
Delay15ms();
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
Delay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
check_busy();
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void lcd1602_Show_line(int row,int col,char *SendData)
{
switch(row){
case 1:
Write_Cmd_Func(0x80+col);
while(*SendData){
Write_Data_Func(*SendData);
SendData++;
}
break;
case 2:
Write_Cmd_Func(0x80+0x40+col);
while(*SendData){
Write_Data_Func(*SendData);
SendData++;
}
break;
}
}
void main()
{
LCD1602_INIT();
lcd1602_Show_line(1,3,"hello world");
}
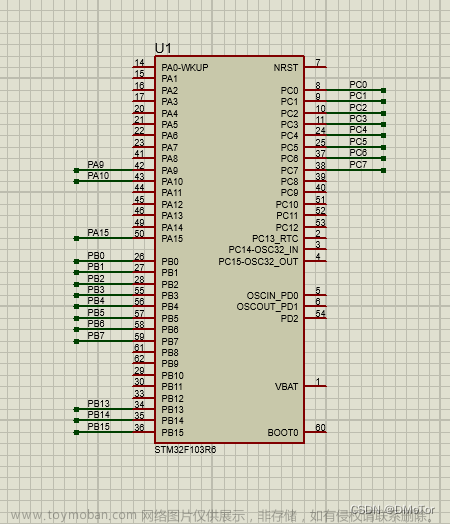
STM32HAL库
RS、RW、EN三根信号线经常需要进行拉高/拉低操作,可以进行封装
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_Pin GPIO_PIN_1
#define RW_Pin GPIO_PIN_2
#define EN_Pin GPIO_PIN_10#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_SET)
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_SET)
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_SET)
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_RESET)
如何将一个字节的数据按位一次性发送到GPIOA的8个管脚?文章来源:https://www.toymoban.com/news/detail-440070.html
GPIOA->ODR = cmd;文章来源地址https://www.toymoban.com/news/detail-440070.html
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_Pin GPIO_PIN_1
#define RW_Pin GPIO_PIN_2
#define EN_Pin GPIO_PIN_10
#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_SET)
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_SET)
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_SET)
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_RESET)
void Write_Cmd_Func(uint8_t cmd)
{
RS_LOW;
RW_LOW;
EN_LOW;
GPIOA->ODR = cmd;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void Write_Data_Func(uint8_t dataShow)
{
RS_HIGH;
RW_LOW;
EN_LOW;
GPIOA->ODR = dataShow;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void LCD1602_INIT(void)
{
//(1)延时 15ms
HAL_Delay(15);
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
HAL_Delay(5);
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)
{
switch(row){
case 1:
Write_Cmd_Func(0x80+col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
case 2:
Write_Cmd_Func(0x80+0x40+col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
}
}
main函数里:
//char position = 0x80 + 0x05;
//char dataShow = 'C';
LCD1602_INIT();
//Write_Cmd_Func(position);//选择要显示的地址
//Write_Data_Func(dataShow);//发送要显示的字符
LCD1602_showLine(1,5,"hello world");
到了这里,关于STM32—LCD1602的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!