文章发布于博客园,主页:https://www.cnblogs.com/-fcy-/。转载请注明出处!
由于需要在stm32上使用USB Host CDC-ECM,连接EC20发送数据到服务器,接触到了ThreadX实时操作系统。
在调研过程中,发现stm32官方USB库内只有Device ECM类,无法作为host连接网卡;
电脑上经常使用的tinyusb,对stm设备的device支持较差;
此外还有lrndis、TeenyUSB,提供了host ecm类的支持,但使用并不方便,且有的已很少有人维护(小开源项目难免如此)。
最终决定使用微软的Azure RTOS ThreadX全家桶,利用NetX Duo+USBX实现对ECM网卡的支持。ThreadX的性能和存储占用都优化得很好,且中间件齐全,免去了很多自己配置的麻烦。目前ThreadX已经开源,并加入CubeMX,直接使用可视化界面就可完成配置,解决一些小坑之后十分方便,遂写此随笔以作记录、分享。
本文使用的工具包括CubeMX、MDK,内容假设阅读者已基本掌握这两个软件的使用。在学习过程中,参考了另两篇教程,附上链接:
https://juejin.cn/post/7099829592713592840
https://blog.csdn.net/wallace89/article/details/114941859
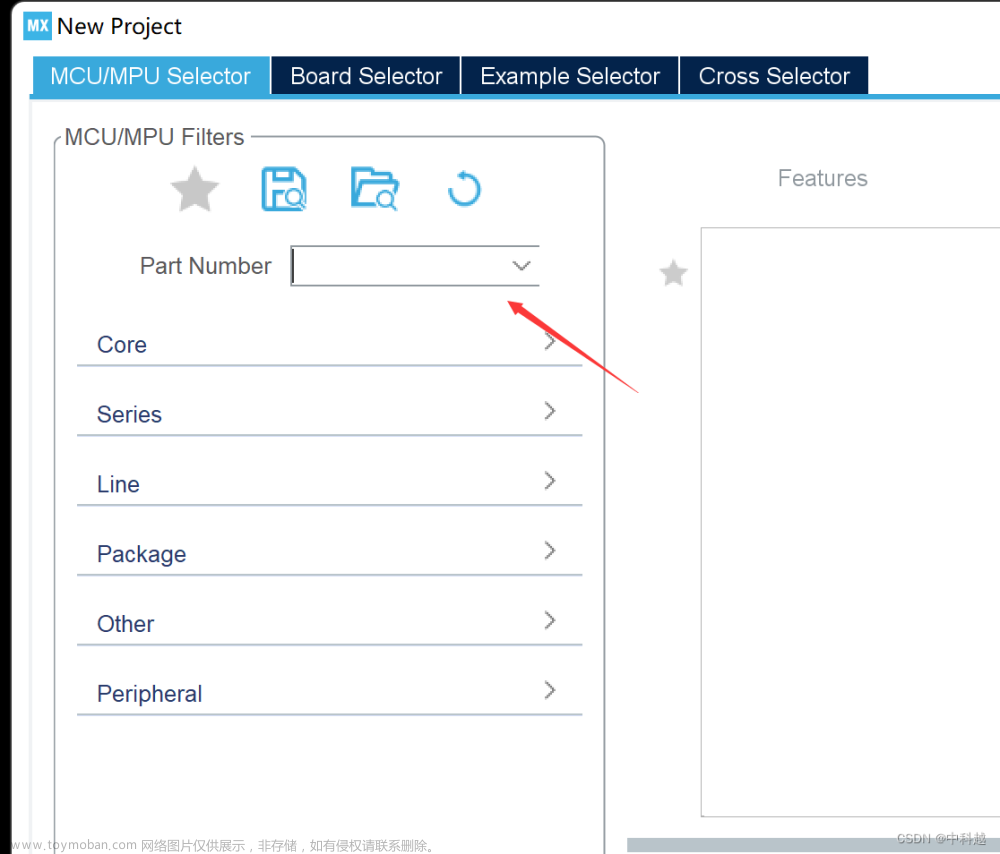
一、CubeMX生成模板
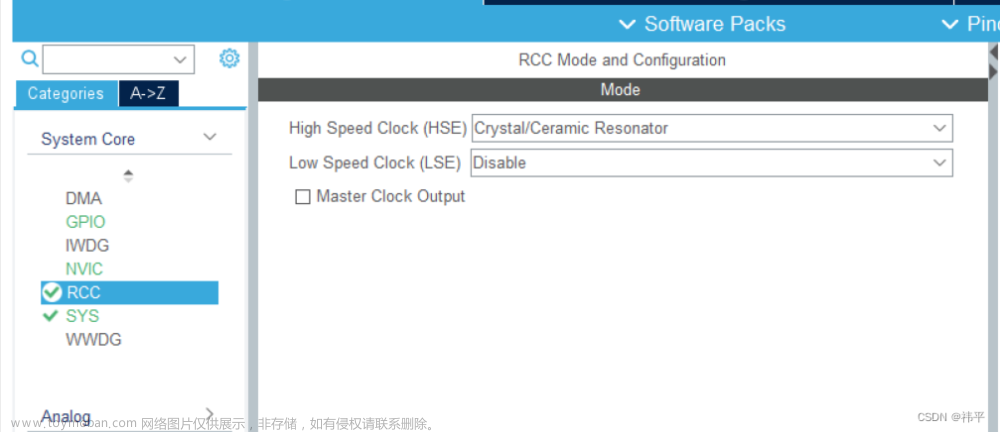
1. 配置RCC、时钟、SYS、GPIO
RCC设置外部晶振,这个根据板子情况调整,我这里高低速都是外部晶振

时钟配置,和平时一样,可以输入HCLK让cubemx自动设置,也可手动调,48MHz时钟一定要有

系统设置内,debug根据板子设置,我使用的是jlink的SW调试口,所以选择serial wire。时基源选择任意一个没用到的TIM。

最后配置板子上三个LED灯的GPIO,根据自己板子上情况修改。

2. 配置串口和USB
根据板子,配置串口用于调试

配置USB FS,用于和EC20通信

3. 重头戏:配置Azure RTOS
首先安装所需软件包

我用的MCU是stm32f4系列,因此找到AZRTOS-F4。勾选Core以及需要使用的USBX-UX Host Class CDC ECM,会提示所选的包还有依赖项没选上,根据提示补齐。如果不需要USB和网络,只选择threadx core就行。注意,这里需要勾选上USBX下面的UX Host Controllers,否则以后移植代码会缺失控制器相关函数。

回到主界面,可以看到左边X-CUBE-AZRTOS-F4变得可选,点击打开配置。
可以根据需要修改配置,我这里基本保持默认,后面有需求再修改。

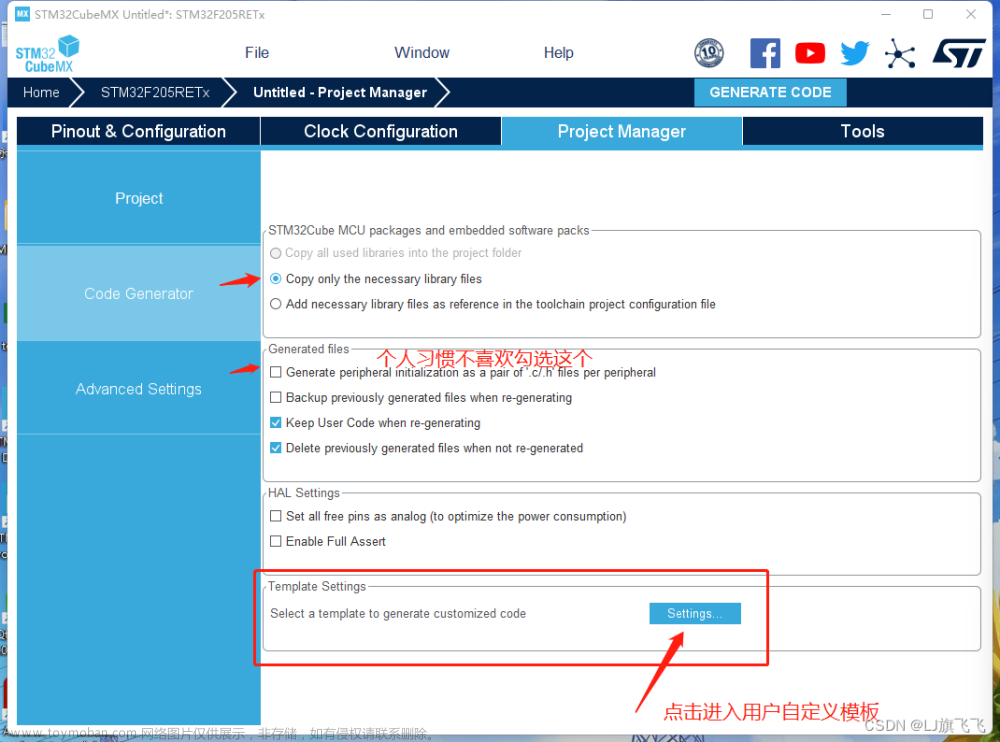
4. 生成项目模板
常规操作,注意:1. IDE选用自己使用的;2. 增大堆栈,我均改为0x2000;3. .c/.h分开
二、Keil内编写跑马灯代码
1. 编辑app_azure_rtos.h
增加对GPIO、串口、printf的支持,代码:
/* USER CODE BEGIN Includes */
#include "main.h"
#include "stdio.h"
#include "usart.h"
#if 1
__asm__(".global __use_no_semihosting");
FILE __stdout;
//define function _sys_exit() to avoid using semi-hosting mode
void _sys_exit(int x)
{
x = x;
}
//redefine function fputc to redirect output
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart6, (uint8_t *)&ch, 1, 0x10);
return ch;
}
#endif
/* USER CODE END Includes */增加线程函数申明
/* USER CODE BEGIN EFP */
void app1_LED123(ULONG thread_input);
/* USER CODE END EFP */2. 编辑app_azure_rtos.h
文件前面增加线程参数设置
/* USER CODE BEGIN PD */
//defination of app1
#define APP1_PRIO 15u //优先级,越大越不优先
#define APP1_STACKSIZE 1024u //堆栈大小,注意大于cubemx内设置的最低大小
static TX_THREAD app1_TCB; //线程控制块
static uint8_t app1_STACK[APP1_STACKSIZE]; //堆栈
/* USER CODE END PD */在 tx_application_define函数内,增加创建线程的操作,并串口显示创建状态。
/* USER CODE BEGIN tx_application_define */
printf("tx_application_define\n");
UINT status = tx_thread_create(&app1_TCB,
"app1_led123",
app1_led123,
0,
&app1_STACK[0],
APP1_STACKSIZE,
APP1_PRIO,
APP1_PRIO,
TX_NO_TIME_SLICE,
TX_AUTO_START);
printf("thread create status:%d\n", status);
/* USER CODE END tx_application_define */这里遇到一个坑,我的堆栈大小起初设置得低于cubemx中指定的400B,因此线程创建失败。可通过status的值判断是否是线程创建失败导致的问题。

最后,在文件末尾编写跑马灯线程代码:
/* USER CODE BEGIN 0 */
void app1_led123(ULONG thread_input)
{
printf("app1_led123 start\n");
while(1) {
HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);
tx_thread_sleep(10);
HAL_GPIO_TogglePin(LED2_GPIO_Port, LED2_Pin);
tx_thread_sleep(10);
HAL_GPIO_TogglePin(LED3_GPIO_Port, LED3_Pin);
tx_thread_sleep(10);
}
}
/* USER CODE END 0 */3. 设置编译和调试参数
在魔法棒内设置使用v6编译器、勾选上microlib。debug选项卡内也选择自己使用的调试器。
v6编译器的速度快了相当多,尤其是在带RTOS的项目里,需要选上。

设置完成,即可编译下载,运行自己的程序!
——————THE END——————文章来源:https://www.toymoban.com/news/detail-440762.html
博客主页:链接。转载请注明出处!文章来源地址https://www.toymoban.com/news/detail-440762.html
到了这里,关于使用STM32CubeMX生成ThreadX实时操作系统工程模板的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!