三轴机械臂逆运动学解算(附代码)
机械臂运动位姿的求解有两种方式
一、正运动学
通过控制已知的连轴(舵机或电机)的旋转角度,求出机械臂终端的空间坐标
二、逆运动学
通过已知的抓取点的空间坐标,求解出三个舵机所需要转动的角度,这里主要讲解逆运动学解法

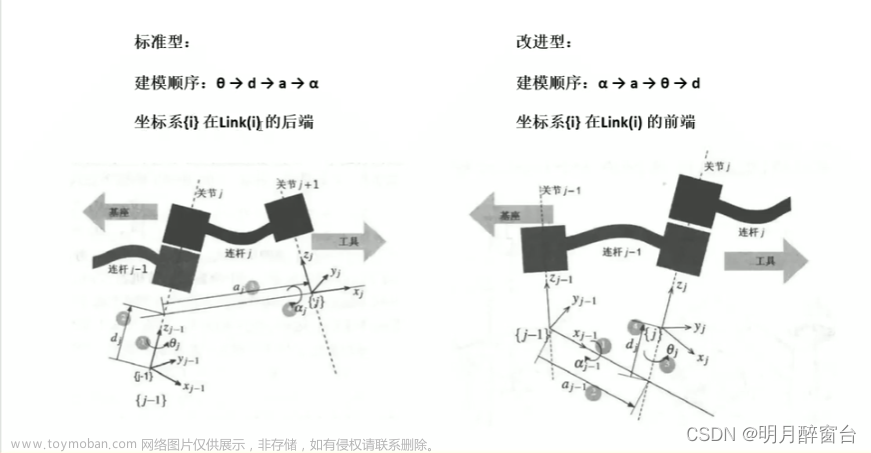
此处θ1 ,θ2, θ3是三个舵机所需转动的角度 ,γ是杆3相对于x轴的夹角,根据刚体旋转,逆运动学求解,会得到两个解,即有两种姿态,相对于前一个杆逆时针旋转的夹角为正,顺时针为负。如上图第一种姿态(上折线),θ1<0,θ2<0,θ3>0
三、求解
(这里就第一种姿态求解)
①求B点坐标
已知空间点A坐标x,y。(因为三杆必然处于同于平面,若涉及z坐标,则机械臂下方云台的解算应考虑在内。
Bx = x - L3*cos(γ);
By = y - L3*sin(γ);
②求出θ1
cosβ = (Bx^2+ By^2 + L1^2 -L2^2) / (2* L1 *sqrt(Bx^2 +By^2));
β = acos(cosβ)*180/pi;
α = atan2(By,Bx)*180/pi;
θ1=-(pi/2-α-β); //数学上θ1为正,但应用上应为负值
③求出θ2
cosθ2 = (Bx^2 + By^2 - L1^2 - L2^2)/(2* L1 *L2);
θ2 = - acos(cosθ2 )*180/pi; //同理θ2改为负值
④求出θ3(这里的γ需预先定好)
通过γ = θ1 + θ2 + θ3
求出θ3 = γ- θ1- θ2
至此三个角度结算完毕
四、代码实现
#include “stdio.h”
#include “math.h”
float theta[3];
#define pi 3.1415
void caculate(float x, float y, float z, float * ptheta)
{
float L1 = 0.14; //杆长
float L2 = 0.11;
float L3 = 0.04;
Bx=x-L3; //这里设置γ为-90
By=y;
lp=Bx* Bx+By* By;
if (sqrt(lp)>=L1+L2 || sqrt(lp)<=fabs(L1-L2))
printf(“unreached”);
alpha = atan2(By,Bx);
beta = acos((L1* L1+lp-L2* L2)/(2* L1* sqrt(lp))); //这里使用弧度制
ptheta[0] = -(pi/2.0-alpha-beta);
ptheta[1] = acos((L1* L1+L2* L2-lp)/(2* L1 *L2))-pi;
ptheta[2] = -ptheta[0] -ptheta[1]- pi/2;
}
caculate(0.14, 0.09, 0.1, theta);
ROS moveit仿真效果

参考博客
(https://blog.csdn.net/xinglucao/article/details/86534402?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522164432010116780261924975%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=164432010116780261924975&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2blogfirst_rank_ecpm_v1~hot_rank-1-86534402.nonecase&utm_term=%E4%B8%89%E8%BD%B4%E6%9C%BA%E6%A2%B0%E8%87%82%E6%8E%A7%E5%88%B6%E7%AE%97%E6%B3%95&spm=1018.2226.3001.4450)文章来源:https://www.toymoban.com/news/detail-440794.html
修改:代码中部分 * 没有打出来文章来源地址https://www.toymoban.com/news/detail-440794.html
void caculate(float x, float y, float z, float *ptheta)
{
float L1 = 0.14; //杆长
float L2 = 0.11;
float L3 = 0.04;
float alpha, beta, lp, Bx, By;
Bx=x-L3; //这里设置γ为-90
By=y;
lp=Bx*Bx+By*By;
if (sqrt(lp)>=L1+L2 || sqrt(lp)<=fabs(L1-L2))
return 1;
alpha = atan2(By,Bx);
beta = acos((L1*L1+lp-L2*L2)/(2*L1*sqrt(lp))); //这里使用弧度制
ptheta[0] = -(pi/2.0-alpha-beta);
ptheta[1] = acos((L1*L1+L2*L2-lp)/(2*L1*L2))-pi;
ptheta[2] = -ptheta[0] -ptheta[1]- pi/2.0;
return 0;
}
到了这里,关于三轴机械臂逆运动学解算(附代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!