一、turtlebot3依赖安装
1、安装turtlebot3sudo apt-get install ros-noetic-turtlebot3-*
//安装gmapping建图算法依赖apt-get install ros-noetic-gmapping
//安装dwa局部路径规划算法apt-get install ros-noetic-dwa-local-planner
2、安装键盘依赖sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-controlturtlebot3键盘控制依赖
建议使用rosrun teleop_twist_keyboard teleop_twist_keyboard.py更方便
二、slam建图与nav导航
slam建图与保存
1、启动roscoreroscore
2、开启仿真环境export TURTLEBOT3_MODEL=waffle_piroslaunch turtlebot3_gazebo turtlebot3_house.launch
3、开启SLAM功能,建图算法选择gmappingexport TURTLEBOT3_MODEL=waffle_piroslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
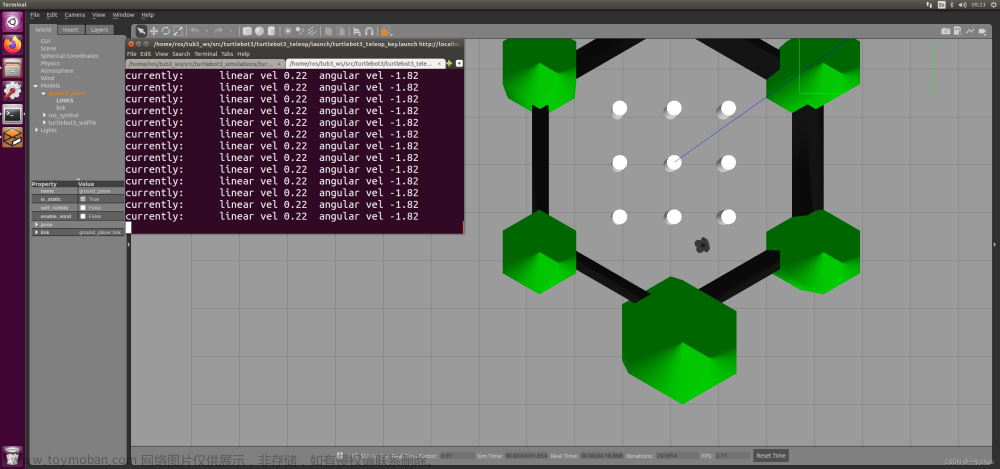
4、启动键盘控制节点,控制小车在环境内转一圈,尽可能扫出完整封闭的地图export TURTLEBOT3_MODEL=waffle_piroslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
5、使用map_server保存地图:rosrun map_server map_saver -f /home/$用户名$/$MapName$

地图读取与nav导航
6、加载保存好的地图rosrun map_server map_server $MapName$.yaml
7、打开gazebo仿真环境export TURTLEBOT3_MODEL=waffle_piroslaunch turtlebot3_gazebo turtlebot3_house.launch
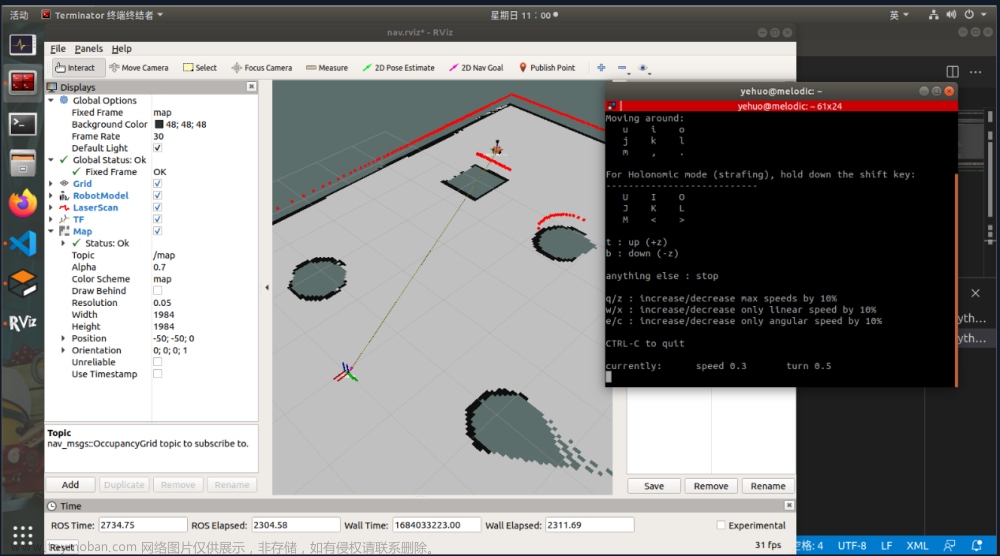
8、打开自主导航功能export TURTLEBOT3_MODEL=waffle_piroslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/$用户名$/$MapName$.yaml

使用2D Nav Goal设置导航目标点,进行自主导航:

 文章来源:https://www.toymoban.com/news/detail-441485.html
文章来源:https://www.toymoban.com/news/detail-441485.html
 文章来源地址https://www.toymoban.com/news/detail-441485.html
文章来源地址https://www.toymoban.com/news/detail-441485.html
到了这里,关于基于turtlebot3实现SLAM建图及自主导航仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!