IIC通信协议详解 & PCF8591应用(Verilog实现/FPGA)
该文章结合PCF8591 8-bit AD/DA 模数/数模转换器来详细介绍IIC通信协议,尽量做到条理清晰,通俗易懂。该文图片均从PCF8591手册中截取,一定程度上引导读者学习阅读data sheet。
之后可能会更新如何将IIC的Verilog实现变为一个IP核,并在pynq-Z2板子上使用。
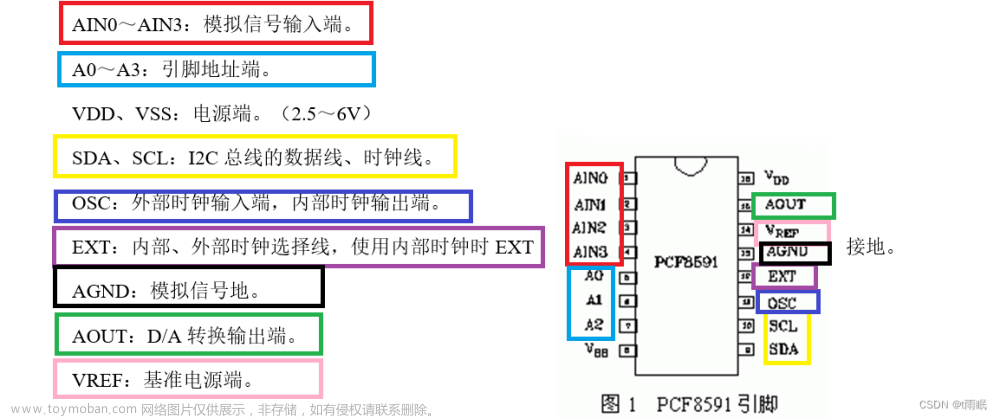
1. PCF8591引脚

2. 功能介绍
2.1 地址位
在I2C总线系统中,每个PCF8591设备都通过发送一个有效地址来激活。地址由固定部分和可编程部分组成。可编程部分必须根据地址引脚A0、A1和A2进行设置。在I2C总线协议中,地址必须始终作为起始条件后的第一个字节发送。地址字节的最后一位是读/写位,它设置了后续数据传输的方向。

在市面上我们所购买到的PCF8591 模数/数模转换器已经被集成到了PCB板上,根据博主的调研,其PCB的原理图绘制如上图所示。
其中A0,A1,A2均接GND,所以在进行DA转换时,发送的写地址位应为8‘h90;在进行AD转换时,先发送的写地址位应为8’h90,再发送读地址位为8‘h91。
2.2 控制位
发送到PCF8591设备的第二个字节将被存储在其控制寄存器中,并用于控制设备功能。
控制寄存器的高四位用于启用模拟输出,并将模拟输入编程为单端或差分输入。低四位选择由高四位定义的一个模拟输入通道。
如果设置了自动递增标志,每次A/D转换后通道号将自动递增。
-
如下图所示,假设我们要进行D/A转换,即将数字信号输入转换为模拟信号输出:
- 我们要允许模拟输出,即把control byte第6位(从0开始,从右往左数)设为1;
- 此时不需要模拟信号输入,所以将第5位和第4位均设为0;
- 第1位和第0位为选择的模拟输出通道,在这里我们选择channel 0通道输出,则第1位和第0位为00;
- 不需要自动递增,则将第2位设为0。
综上所述,我们需要发送的control byte为8‘b0100_0000,即8’h40。
-
假设我们要进行A/D转换,即将模拟信号输入转换为数字信号输出:
- 我们要关闭模拟输出,即把control byte第6位(从0开始,从右往左数)设为0;
- 此时需要模拟信号输入,选择每个信号均为单通道输入,所以将第5位和第4位均设为0;
- 第1位和第0位为选择的模拟输入通道,在这里我们选择channel 0通道输出,则第1位和第0位为00;
- 不需要自动递增,则将第2位设为0。
综上所述,我们需要发送的control byte为8‘b0000_0000,即8’h00。

2.3 D/A 转换
发送到PCF8591设备的第三个字节存储在DAC数据寄存器中,并使用芯片内的D/A转换器将其转换为相应的模拟电压。
D/A转换序列的波形如下图所示。在PCF8591的D/A转换中,我们需要先发送写地址位8’h90,再发送控制位8‘h40,最后再发送想要转换的数字信号数据。

2.4 A/D 转换
A/D转换器采用逐次逼近转换技术。在发送有效的读取模式地址到PCF8591设备后,始终会启动A/D转换周期。 A/D转换周期在应答时钟脉冲的下降沿触发,并在传输上一次转换的结果时执行,详情参见下图所示。
一旦触发了转换周期,所选通道的输入电压样本将存储在芯片上,并转换为相应的8位二进制代码。
转换结果存储在ADC数据寄存器中,并等待传输。如果设置了自动递增标志,则选择下一个通道。
A/D转换序列的波形如下图所示。

3. D/A转换及IIC通信协议波形详解
在有了上面的基本认识后,我们开始详细介绍IIC通信协议中SDA和SCL的波形。
在开始D/A转换时,即IIC通信中主设备向从设备发送信号,我们需要模拟主设备的SDA和SCL信号。
在该例子中主设备可以为包括FPGA在内的任意设备,而从设备为PCF8591,其他从设备也可以类比。
3.1 空闲状态
如下图所示,在总线空闲时,数据线(SDA)和时钟线(SCL)都保持高电平。
3.2 开始状态(START condition)
如下图所示,当D/A转换开始时,时钟线(SCL)仍为高电平,数据线(SDA)从高电平跳变到低电平,这被定义为起始条件。
从设备在检测到起始条件后,会等待主设备发送地址和读/写位,以确定是否需要参与到通信过程中。

3.3 写状态
如2.1部分及2.2部分所说,在PCF8591的D/A转换中,我们需要先发送写地址位8’h90,再发送控制位8‘h40,最后再发送想要转换的数字信号数据。
归根结底,我们向从机发送地址位、控制位和数字信号数据其实都是在向从机写入数据,并且每个数据都是8-bit,所以在这三个阶段时钟线(SCL)和数据线(SDA)所遵循的规则是一样的。


现在详细解释一下,在一个发送8-bit数据时,SDA和SCL的信号变化(数据由高位到低位传输)。
在IIC通信协议中,发送数据过程中,SCL信号为低电平时SDA信号可以发生变化,而在SCL为高电平时,SDA信号有效,应保持不变,所以SDA信号1bit、1bit地传输数据时,SCL信号也对应地由低变高再由低边高。
!!!!!!!!!!!!!!!!!!!以下开始为重点!!!!!!!!!!!!!!!!!!!!
如上图所示,承接开始状态时SDA从高电平跳转为低电平,向从机发送数据,写状态开始。
- 在开始状态SDA变为低电平后,SCL需要至少经过 t H D ; S T A t_{HD;\ STA} tHD; STA μ s \mu s μs,即4.7 μ s \mu s μs后才能下拉为低电平。
- 并且SCL低电平的时间至少要持续 t L O W t_{LOW} tLOW μ s \mu s μs,即4.7 μ s \mu s μs才能再度变为高电平,在这期间,SDA开始传输数据,即这段时间内SDA信号可以发生变化。
- 在 t L o w t_{Low} tLow μ s \mu s μs过去后,SCL变为高电平,此时SDA信号有效(即SDA所表示的0、1数据被写入从机对应的寄存器中),SCL高电平的时间至少维持 t H I G H t_{HIGH} tHIGH μ s \mu s μs,即4.0 μ s \mu s μs。在此期间SDA信号不能发生改变,否则会导致信号传输错误。
- 在 t H I G H t_{HIGH} tHIGH μ s \mu s μs过去后,SCL又变为低电平,此时进入下 1 bit的传输,重复1~4步骤的内容,循环8次,直到传输完8-bit的数据为止(每循环一次代表传输1bit)。
- 在传输完8-bit的数据后,从机会返回一个Acknowledge信号(ACK信号,即应答信号),此时主机应该释放SDA信号线(特别注意,SDA信号线是inout类型,可以由外部传输数据进来,也可以由内部传输信号出去),以便从机控制SDA信号线传输ACK信号(应答信号),即该阶段的SDA信号线表示的是ACK信号。如果ACK信号为低电平时(因为SDA信号线在默认状态下会被拉为高电平,所以将下拉为低电平作为有效信号),说明传输成功,可以继续进行下一个8-bit数据的传输或是结束传输,转为终止状态(STOP condition);如果ACK信号为高电平时,说明传输失败,转为空闲状态。
- 在接收ACK信号时,SCL信号和在发送1 bit的数据时一样,先经过 t L O W t_{LOW} tLOW μ s \mu s μs变为高电平,再经过 t H I G H t_{HIGH} tHIGH μ s \mu s μs后变为低电平,此时ACK信号接收完成。
3.4 终止状态(STOP)
在终止状态时SCL信号先变成高电平,在至少经过 t S U ; S T O t_{SU;\ STO} tSU; STO μ s \mu s μs,即4.0 μ s \mu s μs后SDA才能变为高电平,至此D/A转换结束,IIC通信协议结束。
3.5 D/A转换代码(Verilog实现)
module DAC_I2C
(
input clk_in, //系统时钟
input rst_n_in, //系统复位,低有效
output reg dac_done, //DAC采样完成标志
input [7:0] dac_data, //DAC采样数据
output scl_out, //I2C总线SCL
inout sda_out //I2C总线SDA
);
parameter CNT_NUM = 15;
localparam IDLE = 3'd0;
localparam MAIN = 3'd1;
localparam START = 3'd2;
localparam WRITE = 3'd3;
localparam STOP = 3'd4;
//根据PCF8591的datasheet,I2C的频率最高为100KHz,
//我们准备使用4个节拍完成1bit数据的传输,所以需要400KHz的时钟触发完成该设计
//使用计数器分频产生400KHz时钟信号clk_400khz
//其中CNT_NUM控制分配器的分频,例如如果FPGA的时钟为50MHz,则CNT_NUM = 125,因为400K*125 = 50MHz
reg clk_400khz;
reg [9:0] cnt_400khz;
always@(posedge clk_in or negedge rst_n_in) begin
if(!rst_n_in) begin
cnt_400khz <= 10'd0;
clk_400khz <= 1'b0;
end else if(cnt_400khz >= CNT_NUM-1) begin
cnt_400khz <= 10'd0;
clk_400khz <= ~clk_400khz;
end else begin
cnt_400khz <= cnt_400khz + 1'b1;
end
end
reg [7:0] adc_data_r;
reg scl_out_r;
reg sda_out_r;
reg [2:0] cnt;
reg [2:0] cnt_main;
reg [7:0] data_wr;
reg [2:0] cnt_start;
reg [2:0] cnt_write;
reg [2:0] cnt_stop;
reg [2:0] state;
always@(posedge clk_400khz or negedge rst_n_in) begin
if(!rst_n_in) begin //如果按键复位,将相关数据初始化
scl_out_r <= 1'd1;
sda_out_r <= 1'd1;
cnt <= 1'b0;
cnt_main <= 1'b0;
cnt_start <= 1'b0;
cnt_write <= 3'd0;
cnt_stop <= 1'd0;
dac_done <= 1'b1;
state <= IDLE;
end else begin
case(state)
IDLE:begin //软件自复位,主要用于程序跑飞后的处理
scl_out_r <= 1'd1;
sda_out_r <= 1'd1;
cnt <= 1'b0;
cnt_main <= 1'b0;
cnt_start <= 1'b0;
cnt_write <= 3'd0;
cnt_stop <= 1'd0;
dac_done <= 1'b1;
state <= MAIN;
end
MAIN:begin
if(cnt_main >= 3'd3) cnt_main <= 3'd3; //对MAIN中的子状态执行控制cnt_main
else cnt_main <= cnt_main + 1'b1;
case(cnt_main)
3'd0: begin state <= START; end //I2C通信时序中的START
3'd1: begin data_wr <= 8'h90; state <= WRITE; end //A0,A1,A2都接了GND,写地址为8'h90
3'd2: begin data_wr <= 8'h40; state <= WRITE; end //control byte为8'h40,打开DAC功能
3'd3: begin data_wr <= dac_data; state <= WRITE; dac_done <= 1'b0; end //需要进行DAC转换的数据
3'd4: begin state <= STOP; end //I2C通信时序中的结束STOP
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
START:begin //I2C通信时序中的起始START
if(cnt_start >= 3'd5) cnt_start <= 1'b0; //对START中的子状态执行控制cnt_start
else cnt_start <= cnt_start + 1'b1;
case(cnt_start)
3'd0: begin sda_out_r <= 1'b1; scl_out_r <= 1'b1; end //将SCL和SDA拉高,保持4.7us以上
3'd1: begin sda_out_r <= 1'b1; scl_out_r <= 1'b1; end //clk_400khz每个周期2.5us,需要两个周期
3'd2: begin sda_out_r <= 1'b0; end //SDA拉低到SCL拉低,保持4.0us以上
3'd3: begin sda_out_r <= 1'b0; end //clk_400khz每个周期2.5us,需要两个周期
3'd4: begin scl_out_r <= 1'b0; end //SCL拉低,保持4.7us以上
3'd5: begin scl_out_r <= 1'b0; state <= MAIN; end //clk_400khz每个周期2.5us,需要两个周期,返回MAIN
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
WRITE:begin //I2C通信时序中的写操作WRITE和相应判断操作ACK
if(cnt <= 3'd6) begin //共需要发送8bit的数据,这里控制循环的次数
if(cnt_write >= 3'd3) begin cnt_write <= 1'b0; cnt <= cnt + 1'b1; end
else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end
end else begin
if(cnt_write >= 3'd7) begin cnt_write <= 1'b0; cnt <= 1'b0; end //两个变量都恢复初值
else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end
end
case(cnt_write)
//按照I2C的时序传输数据
3'd0: begin scl_out_r <= 1'b0; sda_out_r <= data_wr[7-cnt]; end //SCL拉低,并控制SDA输出对应的位
3'd1: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上
3'd2: begin scl_out_r <= 1'b1; end //clk_400khz每个周期2.5us,需要两个周期
3'd3: begin scl_out_r <= 1'b0; end //SCL拉低,准备发送下1bit的数据
//获取从设备的响应信号并判断
3'd4: begin sda_out_r <= 1'bz; dac_done <= 1'b1; end //释放SDA线,准备接收从设备的响应信号
3'd5: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上
3'd6: begin if(sda_out) state <= IDLE; else state <= state; end //获取从设备的响应信号并判断
3'd7: begin scl_out_r <= 1'b0; state <= MAIN; end //SCL拉低,返回MAIN状态
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
STOP:begin //I2C通信时序中的结束STOP
if(cnt_stop >= 3'd5) cnt_stop <= 1'b0; //对STOP中的子状态执行控制cnt_stop
else cnt_stop <= cnt_stop + 1'b1;
case(cnt_stop)
3'd0: begin sda_out_r <= 1'b0; end //SDA拉低,准备STOP
3'd1: begin sda_out_r <= 1'b0; end //SDA拉低,准备STOP
3'd2: begin scl_out_r <= 1'b1; end //SCL提前SDA拉高4.0us
3'd3: begin scl_out_r <= 1'b1; end //SCL提前SDA拉高4.0us
3'd4: begin sda_out_r <= 1'b1; end //SDA拉高
3'd5: begin sda_out_r <= 1'b1; state <= MAIN; end //完成STOP操作,返回MAIN状态
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
default:;
endcase
end
end
assign scl_out = scl_out_r; //对SCL端口赋值
assign sda_out = sda_out_r; //对SDA端口赋值
endmodule
4. A/D转换及IIC通信协议波形详解
4.1 A/D转换过程
A/D转换过程与D/A转换类似,只不过A/D转换比D/A多了一个读状态,用来读取由模拟信号转化为数字信号的数据。
- 设置从机工作状态:A/D转换先从空闲状态开始,再进入开始状态,再进入写状态,如2.1部分及2.2部分所说,我们先要发送写地址位8’h90,再发送控制位8‘h00,此时从机(PCF8591)被设置成A/D转换模式,此时模拟输入从channel 0通道进入,再进入终止状态结束此次通信。
- 读取从机返回数据:IIC通信再进入开始状态,再进入写状态,在写状态中如2.1部分所说,将读地址位8’h91写入从机对应的寄存器中,此时SDA信号线的数据即从机信号返回的数字信号的数据,然后IIC通信再进入读状态。
如果读者看到这里觉得很绕,没关系,文章最后的代码将状态转换写得十分清楚,下面我们先来讲解读状态。
4.2 读状态
读状态和写状态类似,一次也是读8-bit的数据,其中SCL信号的变化和写状态一致,SDA信号则要在读状态开始时设为1’bz,即主机释放SDA信号线,使得从机能够控制SDA信号线返回数字信号的数据(返回数据也由高到低返回),并且在每读完一个8-bit的数据后,主机应向从机发送ACK信号,即把SDA信号线拉低,表示传输成功,在这期间需要把SCL信号拉高并且维持 4.7 μ s 4.7 \mu s 4.7μs。文章来源:https://www.toymoban.com/news/detail-441611.html
4.3 A/D转换代码(Verilog实现)
module ADC_I2C
(
input clk_in, //系统时钟
input rst_n_in, //系统复位,低有效
output scl_out, //I2C总线SCL
inout sda_out, //I2C总线SDA
output reg adc_done, //ADC采样完成标志
output reg [7:0] adc_data //ADC采样数据
);
parameter CNT_NUM = 15;
localparam IDLE = 3'd0;
localparam MAIN = 3'd1;
localparam START = 3'd2;
localparam WRITE = 3'd3;
localparam READ = 3'd4;
localparam STOP = 3'd5;
//根据PCF8591的datasheet,I2C的频率最高为100KHz,
//我们准备使用4个节拍完成1bit数据的传输,所以需要400KHz的时钟触发完成该设计
//使用计数器分频产生400KHz时钟信号clk_400khz
//其中CNT_NUM控制分配器的分频,例如如果FPGA的时钟为50MHz,则CNT_NUM = 125,因为400K*125 = 50MHz
reg clk_400khz;
reg [9:0] cnt_400khz;
always@(posedge clk_in or negedge rst_n_in) begin
if(!rst_n_in) begin
cnt_400khz <= 10'd0;
clk_400khz <= 1'b0;
end else if(cnt_400khz >= CNT_NUM-1) begin
cnt_400khz <= 10'd0;
clk_400khz <= ~clk_400khz;
end else begin
cnt_400khz <= cnt_400khz + 1'b1;
end
end
reg [7:0] adc_data_r;
reg scl_out_r;
reg sda_out_r;
reg [2:0] cnt;
reg [3:0] cnt_main;
reg [7:0] data_wr;
reg [2:0] cnt_start;
reg [2:0] cnt_write;
reg [4:0] cnt_read;
reg [2:0] cnt_stop;
reg [2:0] state;
always@(posedge clk_400khz or negedge rst_n_in) begin
if(!rst_n_in) begin //如果按键复位,将相关数据初始化
scl_out_r <= 1'd1;
sda_out_r <= 1'd1;
cnt <= 1'b0;
cnt_main <= 4'd0;
cnt_start <= 3'd0;
cnt_write <= 3'd0;
cnt_read <= 5'd0;
cnt_stop <= 1'd0;
adc_done <= 1'b0;
adc_data <= 1'b0;
state <= IDLE;
end else begin
case(state)
IDLE:begin //软件自复位,主要用于程序跑飞后的处理
scl_out_r <= 1'd1;
sda_out_r <= 1'd1;
cnt <= 1'b0;
cnt_main <= 4'd0;
cnt_start <= 3'd0;
cnt_write <= 3'd0;
cnt_read <= 5'd0;
cnt_stop <= 1'd0;
adc_done <= 1'b0;
state <= MAIN;
end
MAIN:begin
if(cnt_main >= 4'd6) cnt_main <= 4'd6; //对MAIN中的子状态执行控制cnt_main
else cnt_main <= cnt_main + 1'b1;
case(cnt_main)
4'd0: begin state <= START; end //I2C通信时序中的START
4'd1: begin data_wr <= 8'h90; state <= WRITE; end //A0,A1,A2都接了GND,写地址为8'h90
4'd2: begin data_wr <= 8'h00; state <= WRITE; end //control byte为8'h00,采用4通道ADC中的通道0
4'd3: begin state <= STOP; end //I2C通信时序中的START
4'd4: begin state <= START; end //I2C通信时序中的STOP
4'd5: begin data_wr <= 8'h91; state <= WRITE; end //A0 A1 A2都接了GND,读地址为8'h91
4'd6: begin state <= READ; adc_done <= 1'b0; end //读取ADC的采样数据
4'd7: begin state <= STOP; adc_done <= 1'b1; end //I2C通信时序中的STOP,读取完成标志
4'd8: begin state <= MAIN; end //预留状态,不执行
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
START:begin //I2C通信时序中的起始START
if(cnt_start >= 3'd5) cnt_start <= 1'b0; //对START中的子状态执行控制cnt_start
else cnt_start <= cnt_start + 1'b1;
case(cnt_start)
3'd0: begin sda_out_r <= 1'b1; scl_out_r <= 1'b1; end //将SCL和SDA拉高,保持4.7us以上
3'd1: begin sda_out_r <= 1'b1; scl_out_r <= 1'b1; end //clk_400khz每个周期2.5us,需要两个周期
3'd2: begin sda_out_r <= 1'b0; end //SDA拉低到SCL拉低,保持4.0us以上
3'd3: begin sda_out_r <= 1'b0; end //clk_400khz每个周期2.5us,需要两个周期
3'd4: begin scl_out_r <= 1'b0; end //SCL拉低,保持4.7us以上
3'd5: begin scl_out_r <= 1'b0; state <= MAIN; end //clk_400khz每个周期2.5us,需要两个周期,返回MAIN
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
WRITE:begin //I2C通信时序中的写操作WRITE和相应判断操作ACK
if(cnt <= 3'd6) begin //共需要发送8bit的数据,这里控制循环的次数
if(cnt_write >= 3'd3) begin cnt_write <= 1'b0; cnt <= cnt + 1'b1; end
else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end
end else begin
if(cnt_write >= 3'd7) begin cnt_write <= 1'b0; cnt <= 1'b0; end //两个变量都恢复初值
else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end
end
case(cnt_write)
//按照I2C的时序传输数据
3'd0: begin scl_out_r <= 1'b0; sda_out_r <= data_wr[7-cnt]; end //SCL拉低,并控制SDA输出对应的位
3'd1: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上
3'd2: begin scl_out_r <= 1'b1; end //clk_400khz每个周期2.5us,需要两个周期
3'd3: begin scl_out_r <= 1'b0; end //SCL拉低,准备发送下1bit的数据
//获取从设备的响应信号并判断
3'd4: begin sda_out_r <= 1'bz; end //释放SDA线,准备接收从设备的响应信号
3'd5: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上
3'd6: begin if(sda_out) state <= IDLE; else state <= state; end //获取从设备的响应信号并判断
3'd7: begin scl_out_r <= 1'b0; state <= MAIN; end //SCL拉低,返回MAIN状态
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
READ:begin //I2C通信时序中的读操作READ和返回ACK的操作
if(cnt <= 3'd6) begin //共需要接收8bit的数据,这里控制循环的次数
if(cnt_read >= 3'd3) begin cnt_read <= 1'b0; cnt <= cnt + 1'b1; end
else begin cnt_read <= cnt_read + 1'b1; cnt <= cnt; end
end else begin
if(cnt_read >= 3'd7) begin cnt_read <= 1'b0; cnt <= 1'b0; end //两个变量都恢复初值
else begin cnt_read <= cnt_read + 1'b1; cnt <= cnt; end
end
case(cnt_read)
//按照I2C的时序接收数据
3'd0: begin scl_out_r <= 1'b0; sda_out_r <= 1'bz; end //SCL拉低,释放SDA线,准备接收从设备数据
3'd1: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上
3'd2: begin adc_data_r[7-cnt] <= sda_out; end //读取从设备返回的数据
3'd3: begin scl_out_r <= 1'b0; end //SCL拉低,准备接收下1bit的数据
//向从设备发送响应信号
3'd4: begin sda_out_r <= 1'b0; adc_done <= 1'b1; adc_data <= adc_data_r; end //发送响应信号,将前面接收的数据锁存
3'd5: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上
3'd6: begin scl_out_r <= 1'b1; adc_done <= 1'b0; end //SCL拉高,保持4.0us以上
3'd7: begin scl_out_r <= 1'b0; state <= MAIN; end //SCL拉低,返回MAIN状态
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
STOP:begin //I2C通信时序中的结束STOP
if(cnt_stop >= 3'd5) cnt_stop <= 1'b0; //对STOP中的子状态执行控制cnt_stop
else cnt_stop <= cnt_stop + 1'b1;
case(cnt_stop)
3'd0: begin sda_out_r <= 1'b0; end //SDA拉低,准备STOP
3'd1: begin sda_out_r <= 1'b0; end //SDA拉低,准备STOP
3'd2: begin scl_out_r <= 1'b1; end //SCL提前SDA拉高4.0us
3'd3: begin scl_out_r <= 1'b1; end //SCL提前SDA拉高4.0us
3'd4: begin sda_out_r <= 1'b1; end //SDA拉高
3'd5: begin sda_out_r <= 1'b1; state <= MAIN; end //完成STOP操作,返回MAIN状态
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
default:;
endcase
end
end
assign scl_out = scl_out_r; //对SCL端口赋值
assign sda_out = sda_out_r; //对SDA端口赋值
endmodule
5.总结
如果读者有何疑问欢迎在评论区下面评论,或者博主有哪些写错的地方也欢迎指正。文章来源地址https://www.toymoban.com/news/detail-441611.html
到了这里,关于IIC通信协议详解 & PCF8591应用(Verilog实现FPGA)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!