1.中断模式编程控制LED
采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。单片机除了基本的连线外,我们另外只接一只LED灯。
使用外部中断的基本步骤如下:
1.设置对应时钟
2.设置中断
3.初始化IO
4. 把特定IO口设置为中断线路进行初始化
5. 在中断通道的响应函数中中断函数
我们这里使用HAL库,在使用CubeMX时,注意需要配置NVIC选项
在这里插入图片描述
设置PA5、PB5引脚输出低电位,PA6引脚输出高电位。PA5和PA6用来模拟按钮,PB6为GPIO_EXTI6.
各个引脚作用:
PA5:输出低电平
PA6:输出高电平
PB5:输出控制灯亮灭
PB6:模拟开关
A4输出控制灯的亮灭,设置为GPIO_Output
A1持续输出高电平,设置同上
A7持续输出低电平,设置同上
C13个人习惯开启做测试用,设置同上
B5模拟开关,设置为GPIO_EXTI5
在stm32f7xx_it.c中断服务函数文件中,找到EXTI2 和EXTI15_10中断的服务函数。找到EXTI9_5_IRQHandler,它负责EXTI5——EXTI9的中断
在EXTI9_5_IRQHandler函数中调用了 HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_6),HAL_GPIO_EXTI_IRQHandler调用了HAL_GPIO_EXTI_Callback函数。
我们需要修改下 HAL_GPIO_EXTI_Callback函数内部
把它修改成下面这样:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin == GPIO_PIN_6){
GPIO_PinState pinState = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_6);
//低电位
if(pinState==GPIO_PIN_RESET)
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_RESET);
//高电位
else
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_SET);
}
}
烧录运行效果如下:
VID_20221022_121302
串口中断方式进行通信
我们还需要在CubeMx中进行串口中断测试。
中断模式可以提高cpu的使用效率,在等待数据接收和发送时,cpu可以取做别的运算,只需在发送/接收完的一点时间进入中断做一些处理。我们下面主要用到HAL_UART_Transmit_IT函数(填入发送的数据和长度,让程序可以执行后面的任务,系统会自动使用中断模式将数据发完)以及HAL_UART_Receive_IT函数(将要接收的数据和长度填入,然后程序可以执行后面的任务,系统会自动使用中断模式接收数据,当接收完指定长度的数据后,会产生一个中断)
还有两个比较类似它们的函数:HAL_UART_Transmit();串口发送数据,使用超时管理机制
HAL_UART_Receive();串口接收数据,使用超时管理机制。
我们可以现在keil上面模拟打开端口,使用如下命令:
MODE COM1 115200,0, 8, 1
ASSIGN COM1 S1OUT
main函数编写如下:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
}
/* USER CODE END 3 */
}
在main函数下方添加HAL_UART_RxCpltCallback函数:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='t'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='s'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//HAL_Delay(100);
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
仿真运行正常
上板烧录重新运行:
我们还要使用其他的开始和停止符,当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”
这里思路如下:
让单片机一次性接收足够多的字符,不足的补上空格,再进行比较。这种较为简单,我只需要一次接收50个字节,再用字符串比较就行。
main.c代码:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <string.h>
#include <stdio.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
char c[15];//指令 t:停止 s:开始
char c1[15]="hello windows!";
char c2[15]="stop windows! ";
char message[]="hello Windows\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start\n";//提示2
char tips2[]="Stop\n";//提示3
int flag=0;//标志 0:停止发送 1.开始发送
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
HAL_UART_Receive_IT(&huart1, (uint8_t *)c, 14);
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
int strCom(char a1[],char b1[],int num){
int s=1;
for(int i=0;i<num;i++)
if(a1[i]!=b1[i])
s=0;
return s;
}
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(strCom(c,c2,14)){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(strCom(c,c1,14)){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&c, strlen(c),0xFFFF);
HAL_UART_Transmit(&huart1, (uint8_t *)&c1, strlen(c1),0xFFFF);
HAL_UART_Transmit(&huart1, (uint8_t *)&c2, strlen(c2),0xFFFF);
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//HAL_Delay(100);
HAL_UART_Receive_IT(&huart1, (uint8_t *)c, 14);
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
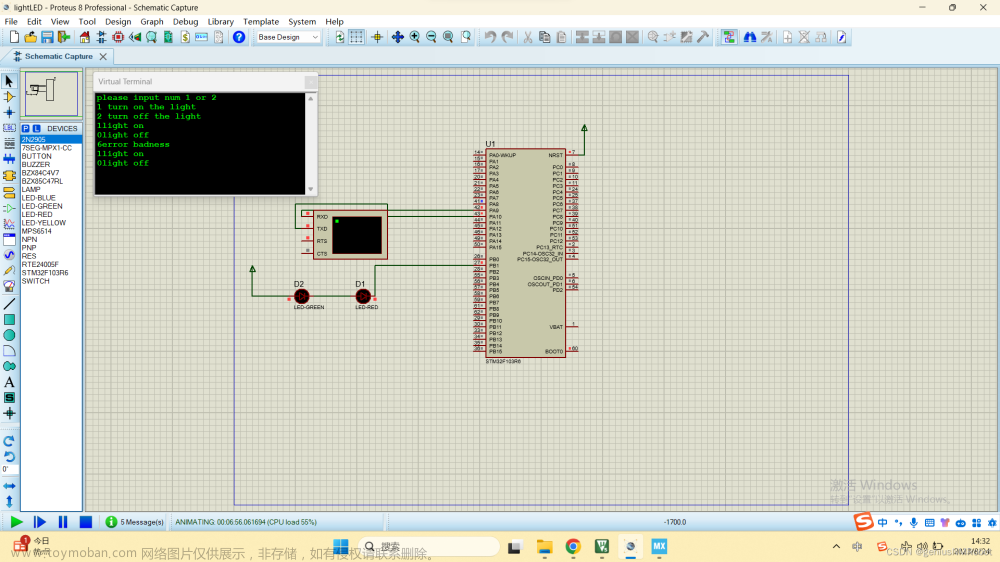
效果图:


STM32采用串口DMA方式,用115200bps或更高速率连续发送数据。
通常,数据传输由CPU执行,而在装有DMA的微型计算机中,DMA代表CPU传输数据。DMA用来提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。无须CPU的干预,通过DMA数据可以快速地移动。这就节省了CPU的资源来做其他操作。
当用户将参数设置好,主要涉及源地址、目标地址、传输数据量这三个,DMA控制器就会启动数据传输,当剩余传输数据量为0时 达到传输终点,结束DMA传输 ,当然,DMA 还有循环传输模式 当到达传输终点时会重新启动DMA传输。
也就是说只要剩余传输数据量不是0,而且DMA是启动状态,那么就会发生数据传输。
每个DMA通道在DMA传输过半、传输完成、传输错误时都会有相应的标志位,如果使能相关的中断后还会产生中断。一次数据传输完成后还分俩种模式:是一次传输还是循环传输。
一次传输: 传输一次后就停止,要想再传的话,必须关闭DMA使能后重新配置后方能继续传输。
循环传输: 一次传输完成后又恢复第一次传输时的配置循环传输,不断重复。
USART1设置如下:
在USART1的DMA Settings里面添加原有USART1_RX,USART1_TX并把优先级设置为high和very high.
在DMA选项里面添加
串口接收完数据是要处理的,那么处理的步骤是怎么样呢?
暂时关闭串口接收DMA通道,有两个原因:1.防止后面又有数据接收到,产生干扰,因为此时的数据还未处理。2.DMA需要重新配置。
清DMA标志位。
从DMA寄存器中获取接收到的数据字节数(可有可无)。
重新设置DMA下次要接收的数据字节数,注意,数据传输数量范围为0至65535。这个寄存器只能在通道不工作(DMA_CCRx的EN=0)时写入。通道开启后该寄存器变为只读,指示剩余的待传输字节数目。寄存器内容在每次DMA传输后递减。数据传输结束后,寄存器的内容或者变为0;或者当该通道配置为自动重加载模式时,寄存器的内容将被自动重新加载为之前配置时的数值。当寄存器的内容为0时,无论通道是否开启,都不会发生任何数据传输。
给出信号量,发送接收到新数据标志,供前台程序查询。
开启DMA通道,等待下一次的数据接收,注意,对DMA的相关寄存器配置写入,如重置DMA接收数据长度,必须要在关闭DMA的条件进行,否则操作无效。
这里因为开发板不接入其他外设,所以接线仅按照最基本的四个接口连接。
注意,如果输入数据间距大于1个字节会自动触发中断。并且必须要有一个字节的空格才会触发。
main.c中int main函数代码:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(recv_end_flag == 1) //接收完成标志
{
DMA_Usart_Send(rx_buffer, rx_len);
rx_len = 0;//清除计数
recv_end_flag = 0;
memset(rx_buffer,0,rx_len);
}
HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE);//重新打开DMA接收
}
stm32f1xx_it.c中USART1_IRQHandler代码:
void USART1_IRQHandler(void)
{
uint32_t tmp_flag = 0;
uint32_t temp;
tmp_flag =__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE); //获取IDLE标志位
if((tmp_flag != RESET))//idle标志被置位
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1);//清除标志位
//temp = huart1.Instance->SR; //清除状态寄存器SR,读取SR寄存器可以实现清除SR寄存器的功能
//temp = huart1.Instance->DR; //读取数据寄存器中的数据
//这两句和上面那句等效
HAL_UART_DMAStop(&huart1); //
temp = __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);// 获取DMA中未传输的数据个数
//temp = hdma_usart1_rx.Instance->NDTR;//读取NDTR寄存器 获取DMA中未传输的数据个数,
//这句和上面那句等效
rx_len = BUFFER_SIZE - temp; //总计数减去未传输的数据个数,得到已经接收的数据个数
recv_end_flag = 1; // 接受完成标志位置1
}
HAL_UART_IRQHandler(&huart1);
}
usart.c中MX_USART1_UART_Init函数文章来源:https://www.toymoban.com/news/detail-442062.html
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE);
/* USER CODE END USART1_Init 2 */
}
这就是DMA项目中主要需要手动编写的三个函数。
运行效果: 文章来源地址https://www.toymoban.com/news/detail-442062.html
文章来源地址https://www.toymoban.com/news/detail-442062.html
到了这里,关于STM32使用中断及串口通信的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!