目录
一、开环运动控制方法
二、运动轴概述
三、配置运动控制向导
一、开环运动控制方法
S7-200 SMART CPU提供三种开环运动控制的方法:
1、脉冲宽度调制(PWM):内置于CPU中,用于速度、位置或占空比的控制
2、脉冲串输出(PTO):内置于CPU中,用于指定长度脉冲或指定距离的控制
3、运动轴:内置于CPU总,用于速度和位置的控制。本文所讲的就是通过运动轴实现步进电机的运动控制。
SR20和ST20 CPU提供了两个脉冲输出(Q0.0和Q0.1),其他CPU均提供了三个脉冲输出(Q0.0、Q0.1和Q0.3),但需要注意的是高速脉冲输出操作只能在晶体管输出的CPU上进行,不可以在继电器输出的CPU上进行,也就是说需要高速脉冲输出时不能使用CR40、CR60、SR20、SR30、SR40和SR60。(如图1所示)

图1 S7-200 SMART CPU
二、运动轴概述
前面提高大部分的S7-200 SMART PLC能提高3个运动轴用于步进电机和伺服电机的速度和位置控制,其功能和性能如下:
1、提供高速控制,速度从每秒2个脉冲到每秒100,000个脉冲(2HZ到100KHZ);
2、提供可组态的测量系统,既可以使用工程单位(例如英寸和厘米)也可以使用脉冲数;
3、提供可组态的反冲补偿;
4、支持绝对、相对和手动位控方式;
5、提供连续操作;
6、提供多达32组移动曲线,每组最多可有16步;
7、提供4种不同的参考点寻找模式,每种模式都可对起始的寻找方向和最终的接近方向进行选择。
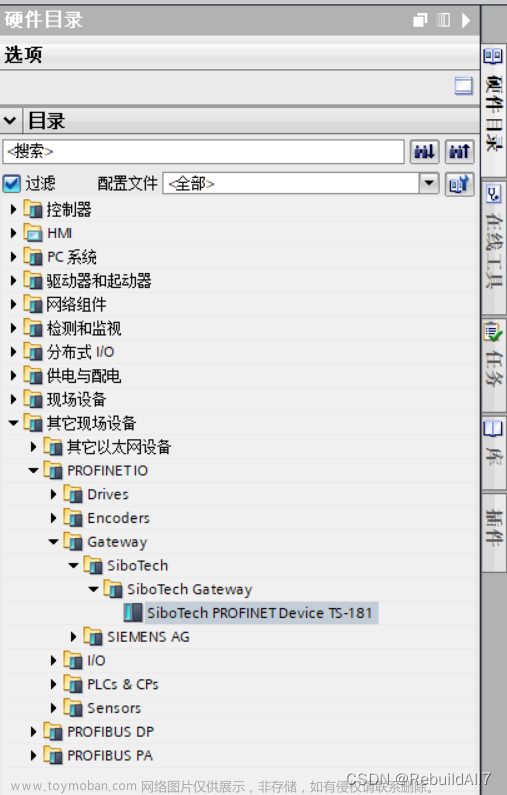
S7-200 SMART CPU运动控制输入/输出定义见图2。
 图2 运动控制输入/输出定义
图2 运动控制输入/输出定义
需要注意的是,Axis0的脉冲和方向输出分别分配到Q0.0和Q0.2,Axis1的脉冲和方向输出分别分配到Q0.1和Q0.7,Axis2的脉冲和方向输出分别分配到Q0.3和Q1.0。如果Axis1组态为脉冲加方向,则P1分配到Q0.7。如果Axis1组态为双向输出或者A/B相输出,则P1被分配到Q0.3,但此时Axis2将不能使用。
三、配置运动控制向导
STEP7-MicroWIN SMART软件提高的运动控制向导工具能帮助我们很快配置好运动轴,接下来要讲的就是配置运动控制向导的步骤。
1、选择工具中的“运动”

2、选择需要组态的轴
不同的运动轴对应的脉冲和方向控制输出口固定且不可更改,需要根据输出口接线进行选择。

3、为所选择的轴命名

4、 设置测量系统的参数

a选择工程单位或者是脉冲数
b选择电机一次选择所需的脉冲数(与电机驱动器上拨码的细分设定所对应)
c选择测量的基本单位(为了更好观察效果,这里选择了度作为测量单位)
d输入电机一次旋转产生多少‘度’的运动(这里输入360.0)
5、设置方向控制

a设置有几路脉冲输出(单相:1路;双相:2路;正交:2路)
b设置脉冲输出极性和方向控制
6、分配输入点(没有输入可以默认不启用)

a正限位使能;
b正限位输入点;
c指定相应输入点有效时的响应方式;
d指定输入信号有效电平(低电平有效或者高电平有效)。

a负限位使能;
b负限位输入点;
c指定相应输入点有效时的响应方式;
d指定输入信号有效电平(低电平有效或者高电平有效)。

a使能参考点;
b参考点输入点;
c指定输入信号有效电平(低电平有效或者高电平有效)。

a使能零脉冲:
b零脉冲输入点。

a使能停止点;
b停止输入点;
c指定相应输入点有效时的响应方式;
d指定输入信号的触发方式,可以选择电平触发或者边沿触发。
e指定输入信号有效电平(低电平有效或者高电平有效)。
7、定义用于禁用或启用电机驱动器/放大器的输出

a使能输出点
b每个轴的输出点都是固定的,Axis0对应Q0.4,Axis1对应Q0.5,Axis2对应Q0.6,用户无法对其进行修改。
8、定义电机的速度

a定义电机运动的最大速度“MAX_SPEED”;
b根据定义的最大速度,在运动曲线中可以指定的最小速度;
c定义电机运动的启动/停止速度“SS_SPEED” 。
9、定义点动参数

a定义点动速度“JOG_SPEED”(电机的点动速度是点动命令有效时能够得到的最大速度);
b定义点动增量“JOG_INCREMENT”(点动增量是瞬间的点动命令能够将电机旋转的角度)。
10、加/减速时间设置(一般默认即可)

a设置从启动/停止速度“SS_SPEED”到最大速度“MAX_SPEED"的加速度时间“ACCEL_TIME”;
b设置从最大速度“MAX_SPEED”到启动/停止速度“SS_SPEED”的减速度时间“DECEL_TIME ”。
11、定义急停时间

a指定应用补偿的时间量
12、定义反冲补偿

反冲补偿为当方向发生变化时,为消除系统中因机械磨损而产生的误差,电机必须运动的距离。反冲补偿总是正值。(缺省=0)
13、使能参考点

若需要从一个绝对位置处开始运动或以绝对位置作为参考,必须建立一个参考点(RP)或零点位置,该点将位置测量固定到物理系统的一个已知点上。
14、设置寻找参考点位置参数

a定义快速寻找速度“RP_FAST”(快速寻找速度是模块执行RP寻找命令的初始速度,通常RP_FAST是MAX_SPEED的2/3左右);
b定义慢速寻找速度“RP_SLOW”(慢速寻找速度是接近RP的最终速度,通常使用一个较慢的速度去接近RP以免错过,RP_SLOW的典型值为SS_SPEED);
c定义初始寻找方向“RP_SEEK_DIR”(初始寻找方向是RP寻找操作的初始方向。通常,这个方向是从工作区到RP附近。限位开关在确定RP的寻找区域时扮演重要角色。当执行RP寻找操作时,遇到限位开关会引起方向反转,使寻找能够继续下去,默认方向=反向);
d定义最终参考点接近方向“RP_APPR_DIR”,(最终参考点接近方向是为了减小反冲和提供更高的精度,应该按照从RP移动到工作区所使用的方向来接近参考点,默认方向=正向)。
15、设置参考点偏移量
参考点偏移量“RP_OFFSET是”在物理的测量系统中RP到零位置之间的距离,缺省=0。
16、设置参考点搜索顺序

S7-200 SMART 提供4中寻找参考点顺序模式,每种模式定义如下:
RP寻找模式1:RP位于RPS输入有效区接近工作区的一边开始有效的位置上;
RP寻找模式2:RP位于RPS输入有效区的中央;
RP寻找模式3:RP位于RPS输入有效区之外,需要指定在RPS失效之后应接收多少个ZP(零脉冲)输入;
RP寻找模式4:RP通常位于RPS输入的有效区内,需要指定在RPS激活后应接收多少个ZP(零脉冲)输入。
17、从驱动器中读取绝对位置

18、新建运动曲线并命名

通过点击“添加(Add)”按钮添加移动曲线并命名。
注意:S7-200 SMART 支持最多32组移动曲线。运动控制向导提供移动曲线定义,在这里,可以为程序定义每一个移动曲线。运动控制向导中可以为每个移动曲线定义一个符号名,其做法是在定义曲线时输入一个符号名即可。
19、定义运动曲线

a选择移动曲线的操作模式(支持四种操作模式:绝对位置、相对位置、单速连续旋转、两速连续转动,当选择绝对位置或相对位置运行模式时,S7-200 SMART每组移动曲线支持最多16步);
b指定单速连续旋转的目标速度
c指定曲线的旋转方向
d选择是否是否RPS输入发出停止信号
20、为配置分配存储区

通过点击“建议”按钮分配存储区,程序中其他部分不能占用该向导分配的存储区。
21、完成组态

当完成对运动控制向导的组态时,只需点击生成(Generate),然后运动控制向导会执行以下任务:
a. 将组态和曲线表插入到 S7-200 SMART CPU 的数据块(AXISx_DATA)中;
b. 为运动控制参数生成一个全局符号表(AXISx_SYM);
c. 在项目的程序块中增加运动控制指令子程序,可在应用中使用这些指令;
要修改任何组态或曲线信息,可以再次运行运动控制向导。
注意:由于运动控制向导修改了程序块、数据块和系统块,要确保这三种块都下载到 S7-200 SMART CPU 中。否则,CPU 可能会无法得到操作所需的所有程序组件。
22、查看输入输出点分配

最后点击“生成”按钮即完成了运动控制向导的配置。文章来源:https://www.toymoban.com/news/detail-443540.html
在下一篇文章中,将会讲解运动控制面板的使用方法及运动控制向导为运动轴创建的指令的使用方法。文章来源地址https://www.toymoban.com/news/detail-443540.html
到了这里,关于西门子S7-200 SMART控制步进电机(二)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!