目录
1、IoU
1.1 什么是IOU
1.2 IOU代码
2、GIOU
2.1 为什么提出GIOU
2.2 GIoU代码
3 DIoU
3.1 为什么提出DIOU
3.2 DIOU代码
4 CIOU
4.1 为什么提出CIOU
4.2 CIOU代码
5 EIOU
5.1 为什么提出EIOU
5.2 EIOU代码
6 Wise-IoU
7 YOLOv5中添加GIoU、DIoU、CIoU、EIoU、Wise-IoU损失函数
1、IoU
1.1 什么是IOU
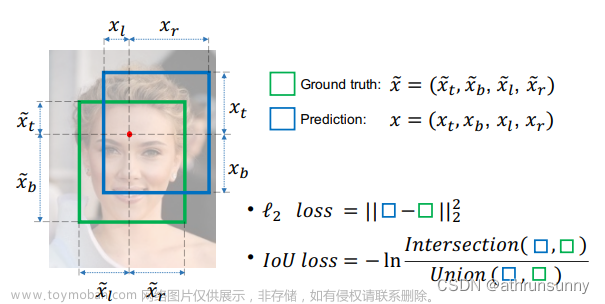
论文链接为:UnitBox: An Advanced Object Detection Network
IoU 的全称为交并比(Intersection over Union),通过这个名称我们大概可以猜到 IoU 的计算方法。IoU 计算的是 “预测的边框” 和 “真实的边框” 的交集和并集的比值。计算过程如下:

其中,绿色面积代表预测框B与真实框A的交集;则
显而易见,IOU的值越高也说明预测框与真实框重合程度越高,代表模型预测越准确,反之,IOU越低模型性能越差。

但是,IOU作为损失函数会出现以下问题:
- 如果两个框没有相交,根据定义,IoU=0,不能度量IoU为零距离远近的程度。同时因为loss=0,没有梯度回传,无法进行学习训练。
- IoU无法精确的反映两者的重合度大小。如下图所示,三种情况IoU都相等,但看得出来他们的重合度是不一样的,左边的图回归的效果最好,右边的最差。

1.2 IOU代码
import numpy as np
def Iou(box1, box2, wh=False):
if wh == False:
xmin1, ymin1, xmax1, ymax1 = box1
xmin2, ymin2, xmax2, ymax2 = box2
else:
xmin1, ymin1 = int(box1[0]-box1[2]/2.0), int(box1[1]-box1[3]/2.0)
xmax1, ymax1 = int(box1[0]+box1[2]/2.0), int(box1[1]+box1[3]/2.0)
xmin2, ymin2 = int(box2[0]-box2[2]/2.0), int(box2[1]-box2[3]/2.0)
xmax2, ymax2 = int(box2[0]+box2[2]/2.0), int(box2[1]+box2[3]/2.0)
# 获取矩形框交集对应的左上角和右下角的坐标(intersection)
xx1 = np.max([xmin1, xmin2])
yy1 = np.max([ymin1, ymin2])
xx2 = np.min([xmax1, xmax2])
yy2 = np.min([ymax1, ymax2])
# 计算两个矩形框面积
area1 = (xmax1-xmin1) * (ymax1-ymin1)
area2 = (xmax2-xmin2) * (ymax2-ymin2)
inter_area = (np.max([0, xx2-xx1])) * (np.max([0, yy2-yy1])) #计算交集面积
iou = inter_area / (area1+area2-inter_area+1e-6) #计算交并比
return iou2、GIOU
论文链接:Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression
2.1 为什么提出GIOU
为了解决上面两个问题,这篇论文提出了GIOU。由于IoU是比值的概念,对目标物体的scale是不敏感的。然而目标检测任务中的BBox的回归损失(MSE loss, l1-smooth loss等)优化和IoU优化不是完全等价的,而且 Ln 范数对物体的scale也比较敏感,IoU无法直接优化没有重叠的部分。这篇论文提出可以直接把IoU设为回归的loss。
GIOU的计算很简单,对于两个bounding box A和B。我们可以算出其最小凸集(同时包含了预测框和真实框的最小框的面积)C,有了最小凸集,就可以计算GIOU,如下所示

从公式可以看出,GIOU有几个优点:
- GIOU是IOU的下界,且取值范围为(-1, 1]。当两个框不重合时,IOU始终为0,不论A、B相隔多远,但是对于GIOU来说,A,B不重合度越高(离的越远),GIOU越趋近于-1。
- GIOU其实就是在IOU的基础上减掉了一个东西,这个减掉的东西,避免了两个bbox不重合时Loss为0的情况;
- 可导:这一点需要强调下,由于max,min,分段函数(比如ReLU)这些都是可导的,所以用1-GIOU作为Loss是可导的。
- 与IoU只关注重叠区域不同,GIoU不仅关注重叠区域,还关注其他的非重合区域,能更好的反映两者的重合度。

但是GIOU同样存在一些问题,主要有:
- 状态1、2、3都是预测框在目标框内部且预测框大小一致的情况,这时预测框和目标框的差集都是相同的,因此这三种状态的GIOU值也都是相同的,这时GIOU退化成了IOU,无法区分相对位置关系;
- GIOU收敛较慢、回归不够准确。

2.2 GIoU代码
import numpy as np
def Giou_np(bbox_p, bbox_g):
"""
:param bbox_p: predict of bbox(N,4)(x1,y1,x2,y2)
:param bbox_g: groundtruth of bbox(N,4)(x1,y1,x2,y2)
:return:
"""
# for details should go to https://arxiv.org/pdf/1902.09630.pdf
# ensure predict's bbox form
x1p = np.minimum(bbox_p[:, 0], bbox_p[:, 2]).reshape(-1,1)
x2p = np.maximum(bbox_p[:, 0], bbox_p[:, 2]).reshape(-1,1)
y1p = np.minimum(bbox_p[:, 1], bbox_p[:, 3]).reshape(-1,1)
y2p = np.maximum(bbox_p[:, 1], bbox_p[:, 3]).reshape(-1,1)
bbox_p = np.concatenate([x1p, y1p, x2p, y2p], axis=1)
# calc area of Bg
area_p = (bbox_p[:, 2] - bbox_p[:, 0]) * (bbox_p[:, 3] - bbox_p[:, 1])
# calc area of Bp
area_g = (bbox_g[:, 2] - bbox_g[:, 0]) * (bbox_g[:, 3] - bbox_g[:, 1])
# cal intersection
x1I = np.maximum(bbox_p[:, 0], bbox_g[:, 0])
y1I = np.maximum(bbox_p[:, 1], bbox_g[:, 1])
x2I = np.minimum(bbox_p[:, 2], bbox_g[:, 2])
y2I = np.minimum(bbox_p[:, 3], bbox_g[:, 3])
I = np.maximum((y2I - y1I), 0) * np.maximum((x2I - x1I), 0)
# find enclosing box
x1C = np.minimum(bbox_p[:, 0], bbox_g[:, 0])
y1C = np.minimum(bbox_p[:, 1], bbox_g[:, 1])
x2C = np.maximum(bbox_p[:, 2], bbox_g[:, 2])
y2C = np.maximum(bbox_p[:, 3], bbox_g[:, 3])
# calc area of Bc
area_c = (x2C - x1C) * (y2C - y1C)
U = area_p + area_g - I
iou = 1.0 * I / U
# Giou
giou = iou - (area_c - U) / area_c
# loss_iou = 1 - iou loss_giou = 1 - giou
loss_iou = 1.0 - iou
loss_giou = 1.0 - giou
return giou, loss_iou, loss_giou
# def giou_tf
if __name__ == '__main__':
p = np.array([[21,45,103,172],
[34,283,155,406],
[202,174,271,255]])
g = np.array([[59,106,154,230],
[71,272,191,419],
[257,244,329,351]])
Giou_np(p, g)3 DIoU
论文连接:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
3.1 为什么提出DIOU
一个好的目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比。
针对IOU和GIOU存在的问题,作者从两个方面进行考虑
- 如何最小化预测框和目标框之间的归一化距离?
- 如何在预测框和目标框重叠时,回归的更准确?

针对第一个问题,提出了DIOU_Loss(Distance_IOU_Loss)

DIOU_Loss考虑了重叠面积和中心点距离,当目标框包裹预测框的时候,直接度量2个框的距离,因此DIOU_Loss收敛的更快。DIOU损失的优点有:
- 与GIoU loss类似,DIoU loss在与目标框不重叠时,仍然可以为边界框提供移动方向。
- DIoU loss可以直接最小化两个目标框的距离,因此比GIoU loss收敛快得多。
- 对于包含两个框在水平方向和垂直方向上这种情况,DIoU损失可以使回归非常快,而GIoU损失几乎退化为IoU损失。
- DIoU还可以替换普通的IoU评价策略,应用于NMS中,使得NMS得到的结果更加合理和有效。
但DIOU同样存在缺点,那就是没有考虑到长宽比。比如下面三种情况,目标框包裹预测框,本来DIOU_Loss可以起作用。但预测框的中心点的位置都是一样的,因此按照DIOU_Loss的计算公式,三者的值都是相同的。

3.2 DIOU代码
def Diou(bboxes1, bboxes2):
rows = bboxes1.shape[0]
cols = bboxes2.shape[0]
dious = torch.zeros((rows, cols))
if rows * cols == 0:#
return dious
exchange = False
if bboxes1.shape[0] > bboxes2.shape[0]:
bboxes1, bboxes2 = bboxes2, bboxes1
dious = torch.zeros((cols, rows))
exchange = True
# #xmin,ymin,xmax,ymax->[:,0],[:,1],[:,2],[:,3]
w1 = bboxes1[:, 2] - bboxes1[:, 0]
h1 = bboxes1[:, 3] - bboxes1[:, 1]
w2 = bboxes2[:, 2] - bboxes2[:, 0]
h2 = bboxes2[:, 3] - bboxes2[:, 1]
area1 = w1 * h1
area2 = w2 * h2
center_x1 = (bboxes1[:, 2] + bboxes1[:, 0]) / 2
center_y1 = (bboxes1[:, 3] + bboxes1[:, 1]) / 2
center_x2 = (bboxes2[:, 2] + bboxes2[:, 0]) / 2
center_y2 = (bboxes2[:, 3] + bboxes2[:, 1]) / 2
inter_max_xy = torch.min(bboxes1[:, 2:],bboxes2[:, 2:])
inter_min_xy = torch.max(bboxes1[:, :2],bboxes2[:, :2])
out_max_xy = torch.max(bboxes1[:, 2:],bboxes2[:, 2:])
out_min_xy = torch.min(bboxes1[:, :2],bboxes2[:, :2])
inter = torch.clamp((inter_max_xy - inter_min_xy), min=0)
inter_area = inter[:, 0] * inter[:, 1]
inter_diag = (center_x2 - center_x1)**2 + (center_y2 - center_y1)**2
outer = torch.clamp((out_max_xy - out_min_xy), min=0)
outer_diag = (outer[:, 0] ** 2) + (outer[:, 1] ** 2)
union = area1+area2-inter_area
dious = inter_area / union - (inter_diag) / outer_diag
dious = torch.clamp(dious,min=-1.0,max = 1.0)
if exchange:
dious = dious.T
return dious4 CIOU
论文链接:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
4.1 为什么提出CIOU
CIOU论文考虑到bbox回归三要素中的长宽比还没被考虑到计算中,因此,进一步在DIoU的基础上提出了CIoU。其惩罚项如下面公式:

其中是权重函数,而用来度量长宽比的相似性,定义为

完整的CIOU损失函数定义:

4.2 CIOU代码
def bbox_overlaps_ciou(bboxes1, bboxes2):
rows = bboxes1.shape[0]
cols = bboxes2.shape[0]
cious = torch.zeros((rows, cols))
if rows * cols == 0:
return cious
exchange = False
if bboxes1.shape[0] > bboxes2.shape[0]:
bboxes1, bboxes2 = bboxes2, bboxes1
cious = torch.zeros((cols, rows))
exchange = True
w1 = bboxes1[:, 2] - bboxes1[:, 0]
h1 = bboxes1[:, 3] - bboxes1[:, 1]
w2 = bboxes2[:, 2] - bboxes2[:, 0]
h2 = bboxes2[:, 3] - bboxes2[:, 1]
area1 = w1 * h1
area2 = w2 * h2
center_x1 = (bboxes1[:, 2] + bboxes1[:, 0]) / 2
center_y1 = (bboxes1[:, 3] + bboxes1[:, 1]) / 2
center_x2 = (bboxes2[:, 2] + bboxes2[:, 0]) / 2
center_y2 = (bboxes2[:, 3] + bboxes2[:, 1]) / 2
inter_max_xy = torch.min(bboxes1[:, 2:],bboxes2[:, 2:])
inter_min_xy = torch.max(bboxes1[:, :2],bboxes2[:, :2])
out_max_xy = torch.max(bboxes1[:, 2:],bboxes2[:, 2:])
out_min_xy = torch.min(bboxes1[:, :2],bboxes2[:, :2])
inter = torch.clamp((inter_max_xy - inter_min_xy), min=0)
inter_area = inter[:, 0] * inter[:, 1]
inter_diag = (center_x2 - center_x1)**2 + (center_y2 - center_y1)**2
outer = torch.clamp((out_max_xy - out_min_xy), min=0)
outer_diag = (outer[:, 0] ** 2) + (outer[:, 1] ** 2)
union = area1+area2-inter_area
u = (inter_diag) / outer_diag
iou = inter_area / union
with torch.no_grad():
arctan = torch.atan(w2 / h2) - torch.atan(w1 / h1)
v = (4 / (math.pi ** 2)) * torch.pow((torch.atan(w2 / h2) - torch.atan(w1 / h1)), 2)
S = 1 - iou
alpha = v / (S + v)
w_temp = 2 * w1
ar = (8 / (math.pi ** 2)) * arctan * ((w1 - w_temp) * h1)
cious = iou - (u + alpha * ar)
cious = torch.clamp(cious,min=-1.0,max = 1.0)
if exchange:
cious = cious.T
return cious5 EIOU
论文链接:Focal and Efficient IOU Loss for Accurate Bounding Box Regression
5.1 为什么提出EIOU
CIOU Loss虽然考虑了边界框回归的重叠面积、中心点距离、纵横比。但是通过其公式中的v反映的纵横比的差异,而不是宽高分别与其置信度的真实差异,所以有时会阻碍模型有效的优化相似性,于是提出EIOU,它的主要思想是:
- 一是认为CIoU loss对于长宽比加入loss的设计不太合理,于是将CIoU loss中反应长宽比一致性的部分替换成了分别对于长和宽的一致性loss,形成了EIoU loss。
- 二是认为不太好的回归样本对回归loss产生了比较大的影响,回归质量相对较好的样本则难以进一步优化,所以论文提出Focal EIoU loss进行回归质量较好和质量较差的样本之间的平衡。

EIOU Loss优点:
- 1)将纵横比的损失项拆分成预测的宽高分别与最小外接框宽高的差值,加速了收敛提高了回归精度。
- 2)引入了Focal Loss优化了边界框回归任务中的样本不平衡问题,即减少与目标框重叠较少的大量锚框对BBox 回归的优化贡献,使回归过程专注于高质量锚框。
5.2 EIOU代码
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, EIoU=False, eps=1e-7):
# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
# Get the coordinates of bounding boxes
if x1y1x2y2: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
else: # transform from xywh to xyxy
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
# Intersection area
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
iou = inter / union
if GIoU or DIoU or CIoU or EIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU or EIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
(b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
if DIoU:
return iou - rho2 / c2 # DIoU
elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
elif EIoU:
rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
cw2 = cw ** 2 + eps
ch2 = ch ** 2 + eps
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2)
else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU
else:
return iou # IoU
6 Wise-IoU
论文链接:Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
具体关于Wise-IoU损失的介绍请参考前期博客
优化改进YOLOv5算法之Wise-IOU损失函数_yolov5算法优化_AI追随者的博客-CSDN博客
7 YOLOv5中添加GIoU、DIoU、CIoU、EIoU、Wise-IoU损失函数
yolov5-6.1版本中的iou损失函数是在utils/metrics.py文件定义的,在该文件添加以下关于GIoU、DIoU、CIoU、EIoU、Wise-IoU函数的代码,如下所示
import numpy as np
import torch, math
class WIoU_Scale:
''' monotonous: {
None: origin v1
True: monotonic FM v2
False: non-monotonic FM v3
}
momentum: The momentum of running mean'''
iou_mean = 1.
monotonous = False
_momentum = 1 - 0.5 ** (1 / 7000)
_is_train = True
def __init__(self, iou):
self.iou = iou
self._update(self)
@classmethod
def _update(cls, self):
if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \
cls._momentum * self.iou.detach().mean().item()
@classmethod
def _scaled_loss(cls, self, gamma=1.9, delta=3):
if isinstance(self.monotonous, bool):
if self.monotonous:
return (self.iou.detach() / self.iou_mean).sqrt()
else:
beta = self.iou.detach() / self.iou_mean
alpha = delta * torch.pow(gamma, beta - delta)
return beta / alpha
return 1
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False, Focal=False, alpha=1, gamma=0.5, scale=False, eps=1e-7):
# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
if scale:
self = WIoU_Scale(1 - (inter / union))
# IoU
# iou = inter / union # ori iou
iou = torch.pow(inter/(union + eps), alpha) # alpha iou
if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared
rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha_ciou = v / (v - iou + (1 + eps))
if Focal:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter/(union + eps), gamma) # Focal_CIoU
else:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
elif EIoU:
rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
cw2 = torch.pow(cw ** 2 + eps, alpha)
ch2 = torch.pow(ch ** 2 + eps, alpha)
if Focal:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter/(union + eps), gamma) # Focal_EIou
else:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou
elif SIoU:
# SIoU Loss https://arxiv.org/pdf/2205.12740.pdf
s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps
s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps
sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
sin_alpha_1 = torch.abs(s_cw) / sigma
sin_alpha_2 = torch.abs(s_ch) / sigma
threshold = pow(2, 0.5) / 2
sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
rho_x = (s_cw / cw) ** 2
rho_y = (s_ch / ch) ** 2
gamma = angle_cost - 2
distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
if Focal:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_SIou
else:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou
elif WIoU:
if Focal:
raise RuntimeError("WIoU do not support Focal.")
elif scale:
return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp((rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051
else:
return iou, torch.exp((rho2 / c2)) # WIoU v1
if Focal:
return iou - rho2 / c2, torch.pow(inter/(union + eps), gamma) # Focal_DIoU
else:
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
if Focal:
return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf
else:
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf
if Focal:
return iou, torch.pow(inter/(union + eps), gamma) # Focal_IoU
else:
return iou # IoU然后在utils/loss.py文件中调用bbox_iou损失函数时,将对应的IOU设置为True即可。

参考文章:【深度学习小知识】目标检测中的IOU、GIOU、DIOU、CIOU、EIOU等理论解析_你好啊:)的博客-CSDN博客 深入浅出Yolo系列之Yolov3&Yolov4&Yolov5&Yolox核心基础知识完整讲解 - 知乎文章来源:https://www.toymoban.com/news/detail-443691.html
详解IoU、GIoU、DIoU、CIoU、EIoU和DIoU-NMS_小Aer的博客-CSDN博客文章来源地址https://www.toymoban.com/news/detail-443691.html
到了这里,关于优化改进YOLOv5算法之添加GIoU、DIoU、CIoU、EIoU、Wise-IoU模块(超详细)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!