yolov5+deepsort 多目标跟踪算法实践
评价指标总览:
一、MOTA (MOT Accuracy)准确率

这种指标可以衡量算法跟踪目标的准确性。IDsw (ID switches)度量用于统计MOT算法在对象之间切换的次数。多目标跟踪精度(MOTA)指标将假阳性率、假阴性率和错配率组合成一个数字,为整体跟踪性能提供一个相当合理的数量。尽管有一些缺点和批评,这是目前为止最广泛接受的评价措施的MOT。
t 是时间帧的索引GT是真实框的物体。
FN(false negative):即该方法未检测到的ground truth对象的数量。(漏检)
FP(false positive): 即被该方法错误检测到但在ground truth中不存在的物体数量。
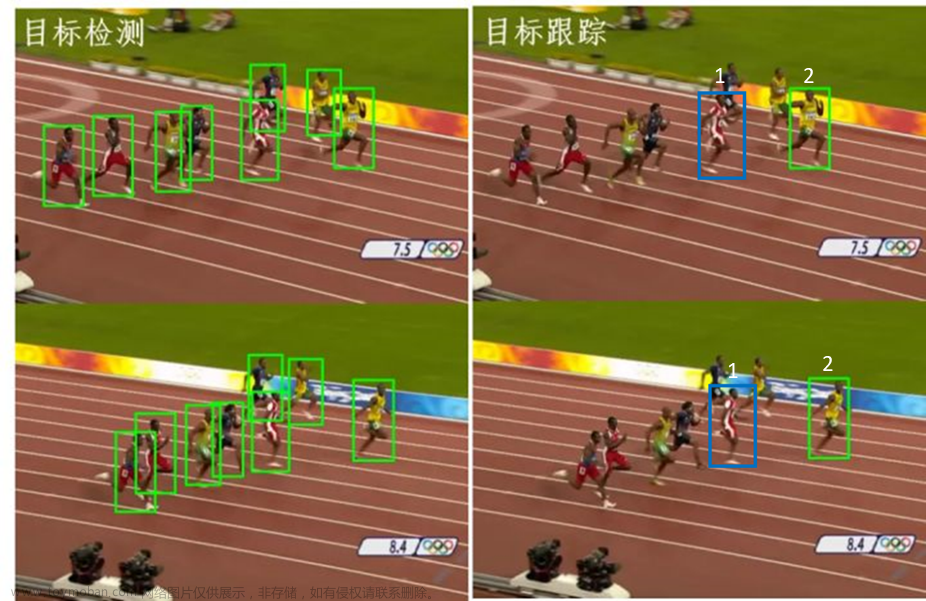
IDSW:在目标检测中,一个物体发生遮挡再重新出现在视野中,若网络重新赋给了一个序号,则定义为发生一次IDsw。
注意,MOTA也可以是负的情况下,由跟踪犯的错误数量超过了场景中所有对象的数量。
二、MOTP (MOT Precision)精度

多目标跟踪精度(MOTP)、跟踪距离误差(TDE)和OSPA属于该子集。它们描述了如何精确地跟踪对象,测量边界框重叠和 / 或距离。具体地说,还考虑了基数错误和标签错误。
多目标跟踪精度是所有真正与它们对应的地面真目标之间的平均差异。对于边框重叠,计算如下:
其中 Ct 表示第 t 帧中匹配的次数,dti 表示第 t 帧中目标 i 与其指定的 ground-truth 对象的 IOU。
因此,MOTP给出了所有正确匹配的假设和它们各自的对象之间td的平均重叠,以及td:= 50%和100%之间的范围。
需要指出的是,MOTP是定位精度的一种度量,不要与使用的 precision / recall 曲线的阳性预测值或相关性相混淆。
在实践中,它量化了检测器的定位精度,因此,它提供了很少的关于跟踪器实际性能的信息。
三、Detection检测指标

四、识别精准率、召回率和F1 score
通过解决时间重叠最大的配对配对问题,建立预测到 ground-truth 映射。在匹配建立后,我们可以计算真阳性id (IDTP) 、假阴性id (IDFN) 和假阳性id (IDFP) 的数量,这将每帧TPs、FNs和FPs的概念推广到轨迹。根据这些量,我们可以将识别精度 (IDP) 和召回率 (recall) 表示为:


五、MT (Mostly Tracked)&ML (Mostly Lost)
MT:对于所有的GT里面的轨迹来说,满足高于80%时间都能成功匹配的轨迹占比。这里不关心中途id是否发生改变,只要能有检测框和他匹配上即可。
MT越大就表明GT中被成功匹配时间占比很长的轨迹越多,跟踪效果越好。


完整性指标表示ground truth轨迹被跟踪的完整程度。主要跟踪(MT)、部分跟踪(PT)、大部分丢失(ML)和碎片(FM)属于这个集合。文章来源:https://www.toymoban.com/news/detail-444238.html
挖个坑:后续结合代码实战分析文章来源地址https://www.toymoban.com/news/detail-444238.html
到了这里,关于【多目标追踪算法】多目标跟踪评价指标的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



![[MOT Challenge]官方生成多目标跟踪算法性能评价指标结果,解决test数据集没有gt文件和官网注册问题](https://imgs.yssmx.com/Uploads/2024/02/773757-1.png)