1 FOC原理
1.1 FOC控制流程
FOC又称矢量控制,是通过控制变频器输出电压的幅值和频率控制三相直流无刷电机的一种变频驱动控制方法。FOC的实质是运用坐标变换将三相静止坐标系下的电机相电流转换到相对于转子磁极轴线静止的旋转坐标系上,通过控制旋转坐标系下的矢量大小和方向达到控制电机目的。由于定子上的电压量、电流量、电动势等都是交流量,并都以同步转速在空间上不断旋转,控制算法难以实现控制。通过坐标变换之后,旋转同步矢量转换成静止矢量,电压量和电流量均变为直流量。再根据转矩公式,找出转矩与旋转坐标系上的被控制量之间关系,实时计算和控制转矩所需的直流给定量,从而间接控制电机达到其性能。由于各直流量是虚构的,在物理上并没有实际意义,因而还需通过逆变换变为实际的交流给定值。结合矢量控制框图,系统的控制过程分析如图1-1所示。

图1-1 FOC控制方框图
1、测量电机运行时三相定子电流,可得到Ia、Ib、Ic。将三相电流通过 Clark 变换至两相电流Iα和Iβ,其是相互正交的时变电流信号。
2、Iα和Iβ通过Park变换得到旋转坐标系下的电流Id和Iq 。在电机达到稳定状态时,Id和Iq 是常量。此时所使用的转子位置为上一次迭代计算出来的角度值。
3、Id的参考值决定了电机转子磁通量,Iq 的参考值决定了电机的转矩输出大小,二者各自的实际值与参考值进行比较得到的误差,作为电流环 PI 控制器的输入。通过PI控制计算输出得到Vd和Vq, 即要施加到电机绕组上的电压矢量[6]。
4、有传感器FOC根据Hall信号或者通过无感估算计算出转子位置和电机转速。新的转子角度可告知 FOC算法下一个电压矢量在何处。计算出的电机转速将用于电机状态的切换,环路切换,堵转保护等子功能模块的数据支持。
5、利用新的电机角度,Vd和Vq 经过 Park 逆变换到两相静止坐标系上。该计算将产生下一个正交电压值 Vα、 Vβ。再采用 SVPWM 算法判定其合成的电压矢量位于哪个扇区,计算出三相各桥臂开关管的导通时间。最后经过三相逆变器驱动模块输出电机所需的三相电压。
1.2 坐标变换
从定子的角度来观察电机的运行电流,会看到在定子上施加了一个正弦输入电流。该时变信号产生了旋转的磁通,转子的速度是旋转磁通矢量的函数。从静止坐标系的角度来看,定子电流和旋转磁通矢量为交流量。
电机内部,转子随着定子电流所产生的选择磁通矢量以相同的速度同步旋转。如果从这个角度观察稳态条件下的电机,那定子电流看似常量,且磁通矢量是静止的。这样通过参考坐标变换,可使用标准控制环,如同控制直流量一样实现对定子电流的控制。这就是FOC坐标变换的基本思想。
1 Clark变换
为了方便计算,Clark变换将三相定子坐标系变换到两相静止坐标系中。

图1-2三相电流示意图
在三相定子坐标系中,电机三相电流相位差120°如图2-2所示。

图2-3Clarke变换示意图
等幅值变换:

等功率变换:

2 Park变换
Park变换是将两相静止坐标系变换到转子侧的旋转坐标系。将Iα 与Iβ 进行坐标Park变换(如图2-4所示)得到直流量Id 与Iq 。Id 控制电机的磁通,Iq 控制电机的转矩。

图2-4Park变换示意图
变换公式如下:

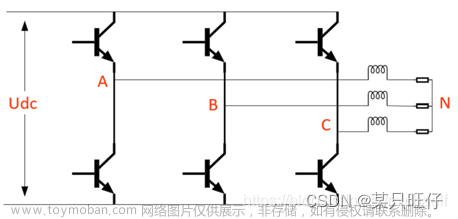
1.3 单电阻电流采样
单电阻采样方式通过在不同的时刻采集母线电流的方式来区分相电流,并对三相电流进行重构。其原理如下:在SVPWM调制的过程中,合成一个矢量是由相邻的两个基矢量与零矢量在一个周期内分别运行不同比例的时间组成。在每一个基矢量独立运行时,逆变桥的开关状态是固定的。在这一段时间内,母线上流过的电流与电机某一相上流过的电流是一致的,因此在不同的基矢量独立运行的过程对母线电流进行采样,就可以得到相应的相电流。如3-4图所示,在基矢量U(001)运行期间,W 相与V相的上桥臂断开,下桥臂闭合。U相的上桥臂闭合,下桥臂断开,此时母线电流的为流过U相的电流,对应为Ia。如图3-5所示,在基矢量U(010)运行期间,W 相与U相的上桥臂断开,下桥臂闭合。V相的上桥臂闭合,下桥臂断开,此时母线电流的为流过V相的电流,对应为Ib。

图3-4 U(001)矢量独立运行电流采样示意图

图3-5 U(010)矢量独立运行电流采样示意图
所有基矢量单独运行的时间内,母线上电流情况如表3-1所示。
表3-1单电阻采样时序表
| 矢量类型 |
U相桥臂状态 |
V相桥臂状态 |
W相桥臂状态 |
母线电流 |
| U(000) |
0文章来源:https://www.toymoban.com/news/detail-446769.html |
0 |
0 |
0 |
| U(001) |
0 |
0 |
1 |
Ia |
| U(010) |
0 |
1 |
0 |
Ib |
| U(011) |
0 |
1 |
1 |
-Ic |
| U(100) |
1 |
0 |
0 |
Ic |
| U(101) |
1 |
0 |
1 |
-Ib |
| U(110) |
1 |
1 |
0 |
-Ia |
| U(111) |
1 |
1 |
1 |
0 |
(注:桥臂状态0,表示上桥断开,下桥闭合;桥臂状态1,表示上桥闭合,下桥断开;Ia为流过U相的电流,Ib表示流过V相的电流,Ic表示流程W相的电流)文章来源地址https://www.toymoban.com/news/detail-446769.html
到了这里,关于永磁同步电机控制笔记:FOC控制原理笔记整理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!