引言
海康机器人官网链接:https://www.hikrobotics.com/cn
根据购买设备的型号下载用户说明书
笔者实验室购买了两款,一款GigE网口接口的,一款USB接口
GigE网口接口
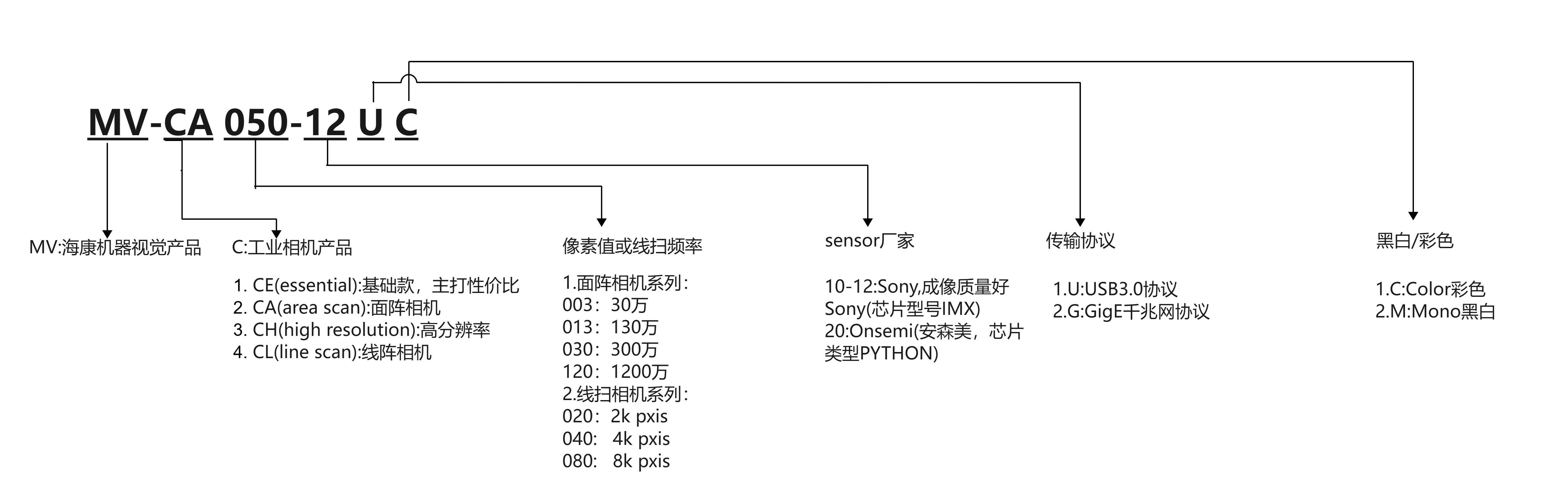
USB接口:MV-CA050-20UC

1 软件安装步骤
1.1 SDK安装
服务支持”>“下载中心”>“机器视觉”中下载MVS客户端安装包及SDK开发包。
1.1.1 Ubuntu18.04系统安装

下载安装压缩包,并解压
查看README如下:
安装包对应的操作系统
arm架构64位系统:
MVS-2.1.2_aarch64_20221024.deb
MVS-2.1.2_aarch64_20221024.tar.gz
arm架构32位系统:
MVS-2.1.2_armhf_20221024.deb
MVS-2.1.2_armhf_20221024.tar.gz
MVS-2.1.2_arm-none_20221024.tar.gz
x86架构64位系统:
MVS-2.1.2_i386_20221024.deb
MVS-2.1.2_i386_20221024.tar.gz
x86架构32位系统:
MVS-2.1.2_x86_64_20221024.deb
MVS-2.1.2_x86_64_20221024.tar.gz
说明:
树莓派选armhf架构,jetson选aarch64,pc机选x86_64,i386是32位pc。
armhf和aarch64区别就是armhf是armv7架构,如树莓派。aarch64是armv8架构,如jetson nano。
arm-none只有Samples,没有编译好的bin,也没有dpkg包,海康也没有提供源码,所以用不上。
1. 根据系统名称选择相对应的安装包:在终端中输入“uname -a”命令,根据输出的信息选择安装包,例如:输出的信息包含aarch64就选择aarch64的安装包;
2. .deb安装包通过dpkg命令安装,主要应用于ubuntu等系统;
3. .tar.gz安装包是一个压缩包,通tar命令解压后,再执行setup.sh脚本进行安装。

实际安装:
方法1:
根据自己的系统选择解压相应的压缩包,打开INSTALL查看安装步骤
To install the MVS Camera Software Suite in /opt/MVS # 软件安装目录
follow these steps:
1. Gaining root privileges and input password:
sudo su or su root # 进入root权限进行安装
2. Change to the directory which contains this INSTALL file, e.g.:
cd ~/MVS-1.0.0_x86_64 # 进入文件夹
3. Running the configuration scripts source
./setup.sh # 执行安装
方法2:
或者使用deb的方式安装,方便卸载。tar和deb安装都可以
sudo dpkg -i MVS-2.1.2_x86_64_20221208.deb
# 删除用以下命令
sudo dpkg -r mvs
如下图所示:
编译demo1
source ~/.bashrc
cd /opt/MVS/Samples/64/GrabImage
make
./GrabImage

编译demo2
source ~/.bashrc
cd /opt/MVS/Samples/64/ImageProcess
make
./ImageProcess


打开当前目录的image.bmp照片,说明sdk的开发环境测试成功。
开启网络巨帧
# 查看网卡名
ifconfig

# 开启网络巨帧
sudo ifconfig enp0s31f6 mtu 9000
# 再次使用ifconfig查看,mtu等于9000,即设置成功
ifconfig
# 永久设置网卡开启巨帧
sudo vim /etc/network/interfaces
# 将sudo ifconfig enp0s31f6 mtu 9000写入文件


1.1.2 Windows 11 系统安装

解压并运行.exe文件进行安装,安装后打开软件,如图所示:
Windows下设置静态ip和打开网络巨帧设置
参考链接🔗关于海康工业相机连接电脑时出现链接速度低于1Ggps解决办法
1.2 打开软件
Ubuntu 系统
sudo su # 须进入root权限才能打开软件
# Execute /opt/MVS/bin/MVSPlayer to test your cameras.
cd /opt/MVS/bin # 进入软件安装目录
./MVS # 执行软件

GigE相机
USB相机
1.3 软件功能说明



2 python+opencv:二次开发SDK
项目目录结构
其中MVImport从安装目录中拷贝,如下图所示,GrabImage_opencv.py:自定义代码(基于python+OpenCV实现取流,显示、保存视频等),util用于放入自定义的其他功能性脚本 文章来源:https://www.toymoban.com/news/detail-446773.html
文章来源:https://www.toymoban.com/news/detail-446773.html
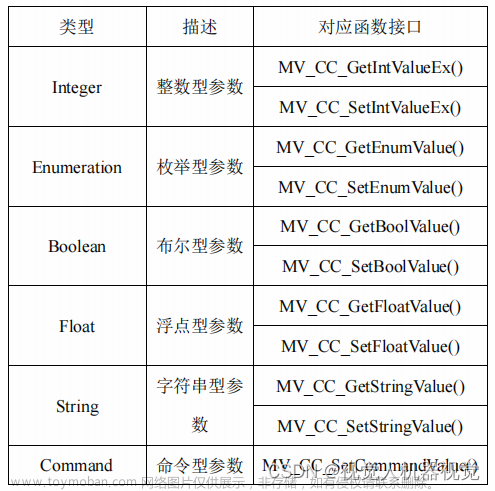
2.1 相机控制步骤
相机控制分成枚举、打开、参数设置、关闭,销毁句柄五个步骤
参考链接:https://blog.csdn.net/qq_23107577/article/details/113984935文章来源地址https://www.toymoban.com/news/detail-446773.html
2.1 主代码GrabImage_opencv.py
# -- coding: utf-8 --
"""
2023.03.14
author:alian
function 海康威视摄像头取流
总结海康相机的取流步骤如下:
1 枚举
2 打开
3 参数设置
4 取流
5 关闭
6 销毁句柄
"""
import sys
import threading
import os
import termios
import time
import cv2
import numpy as np
from ctypes import *
sys.path.append("/opt/MVS/Samples/64/Python/MvImport") # 导入相应SDK的库,实际安装位置绝对路径
from MvImport.MvCameraControl_class import *
def creat_video(): # 创建视频
time_stamp = time.time()
video_name = time.strftime("%Y%m%d%H%M%S", time.localtime(time_stamp))
writer = cv2.VideoWriter("%s.mp4" % video_name, cv2.VideoWriter_fourcc(*"mp4v"), 30, (img_w, img_h))
return writer,time_stamp
# opencv转换显示
def work_thread_opencv(cam=0, pData=0, nDataSize=0,video_length=None):
img_w = 1920
img_h = 1080
stFrameInfo = MV_FRAME_OUT_INFO_EX()
memset(byref(stFrameInfo), 0, sizeof(stFrameInfo))
# 定义视频对象输出,自定义一段时间后新建视频文件,时间间隔设置为video_length
writer, time_stamp = creat_video()
while True:
ret = cam.MV_CC_GetOneFrameTimeout(pData, nDataSize, stFrameInfo, 1000)
if ret == 0:
print("get one frame: Width[%d], Height[%d], PixelType[0x%x], nFrameNum[%d]" % (
stFrameInfo.nWidth, stFrameInfo.nHeight, stFrameInfo.enPixelType, stFrameInfo.nFrameNum))
print(time.time()-time_stamp)
# 设置视频采集时长不大于video_length(以小时为单位)
if video_length!=None and time.time()-time_stamp > video_length*3600:
writer.release()
writer, time_stamp = creat_video()
# 设置相机输出像素格式,用OpenCV显示和保存视频数据
img = np.asarray(pData) # 读取帧
img = img.reshape(stFrameInfo.nHeight, stFrameInfo.nWidth, -1)
img = cv2.resize(img,(img_w,img_h))
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
import tkinter as tk # 获取屏幕尺寸,用于随屏幕分辨率自适应显示
root = tk.Tk()
width = root.winfo_screenwidth()
height = root.winfo_screenheight()
root.destroy()
cv2.imshow('View', cv2.resize(img, (width, height)))
writer.write(img) # 写入视频数据
# 按Q退出
if cv2.waitKey(24) & 0xFF == ord('q'):
break
else:
print("no data[0x%x]" % ret)
cv2.destroyAllWindows() # 释放所有显示图像窗口
sys.exit()
def press_any_key_exit(): # 任意按键退出程序
fd = sys.stdin.fileno()
old_ttyinfo = termios.tcgetattr(fd)
new_ttyinfo = old_ttyinfo[:]
new_ttyinfo[3] &= ~termios.ICANON
new_ttyinfo[3] &= ~termios.ECHO
termios.tcsetattr(fd, termios.TCSANOW, new_ttyinfo)
try:
os.read(fd, 7)
except:
pass
finally:
termios.tcsetattr(fd, termios.TCSANOW, old_ttyinfo)
if __name__ == "__main__":
deviceList = MV_CC_DEVICE_INFO_LIST()
tlayerType = MV_GIGE_DEVICE | MV_USB_DEVICE
# 1 枚举设备 | en:Enum device
ret = MvCamera.MV_CC_EnumDevices(tlayerType, deviceList)
if ret != 0:
print("enum devices fail! ret[0x%x]" % ret)
sys.exit()
if deviceList.nDeviceNum == 0:
print("find no device!")
sys.exit()
print("Find %d devices!" % deviceList.nDeviceNum)
nConnectionNum = 0
# 2 打开
# 2.1 创建相机实例 | en:Creat Camera Object
cam = MvCamera()
# ch:选择设备并创建句柄| en:Select device and create handle
stDeviceList = cast(deviceList.pDeviceInfo[int(nConnectionNum)], POINTER(MV_CC_DEVICE_INFO)).contents
ret = cam.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
print("create handle fail! ret[0x%x]" % ret)
sys.exit()
# 2.2 打开设备 | en:Open device
ret = cam.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
print("open device fail! ret[0x%x]" % ret)
sys.exit()
# 3 参数设置
# 3.1 设置触发模式为off | en:Set trigger mode as off
ret = cam.MV_CC_SetEnumValue("TriggerMode", MV_TRIGGER_MODE_OFF)
if ret != 0:
print("set trigger mode fail! ret[0x%x]" % ret)
sys.exit()
# 3.2 获取数据包大小 | en:Get payload size
stParam = MVCC_INTVALUE()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE))
ret = cam.MV_CC_GetIntValue("PayloadSize", stParam)
if ret != 0:
print("get payload size fail! ret[0x%x]" % ret)
sys.exit()
nPayloadSize = stParam.nCurValue
# 4 开始取流 | en:Start grab image
ret = cam.MV_CC_StartGrabbing()
if ret != 0:
print("start grabbing fail! ret[0x%x]" % ret)
sys.exit()
# 将PayloadSize的uint数据转为可供numpy处理的数据,后面就可以用numpy将其转化为numpy数组格式。
data_buf = (c_ubyte * nPayloadSize)()
try:
hThreadHandle = threading.Thread(target=work_thread_opencv, args=(cam, data_buf, nPayloadSize))
hThreadHandle.start()
hThreadHandle.join()
except:
print("error: unable to start thread")
# 5 关闭
# 5.1 停止取流 | en:Stop grab image
ret = cam.MV_CC_StopGrabbing()
if ret != 0:
print("stop grabbing fail! ret[0x%x]" % ret)
del data_buf
sys.exit()
# 5.2 关闭设备 | Close device
ret = cam.MV_CC_CloseDevice()
if ret != 0:
print("close deivce fail! ret[0x%x]" % ret)
del data_buf
sys.exit()
# 6 销毁句柄 | Destroy handle
ret = cam.MV_CC_DestroyHandle()
if ret != 0:
print("destroy handle fail! ret[0x%x]" % ret)
del data_buf
sys.exit()
del data_buf
到了这里,关于【HIKROBOT】海康机器人:工业相机SDK二次开发的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!