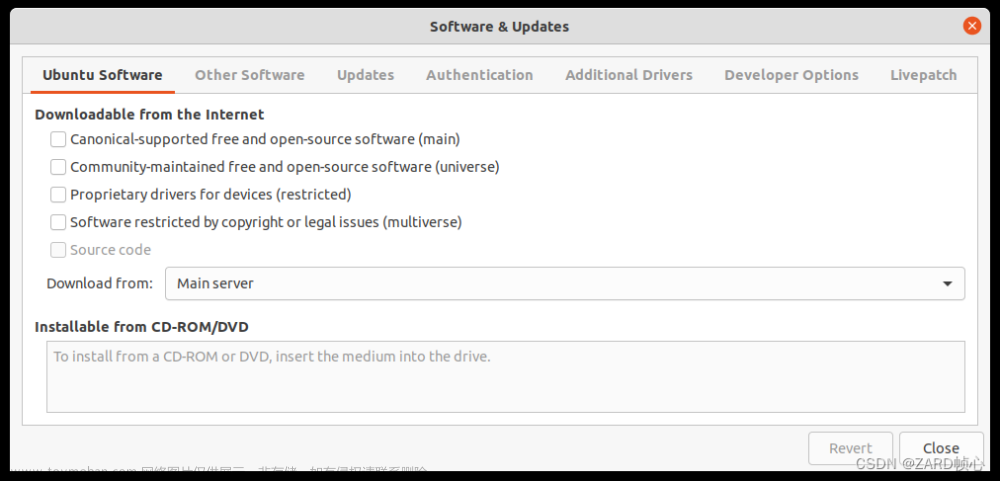
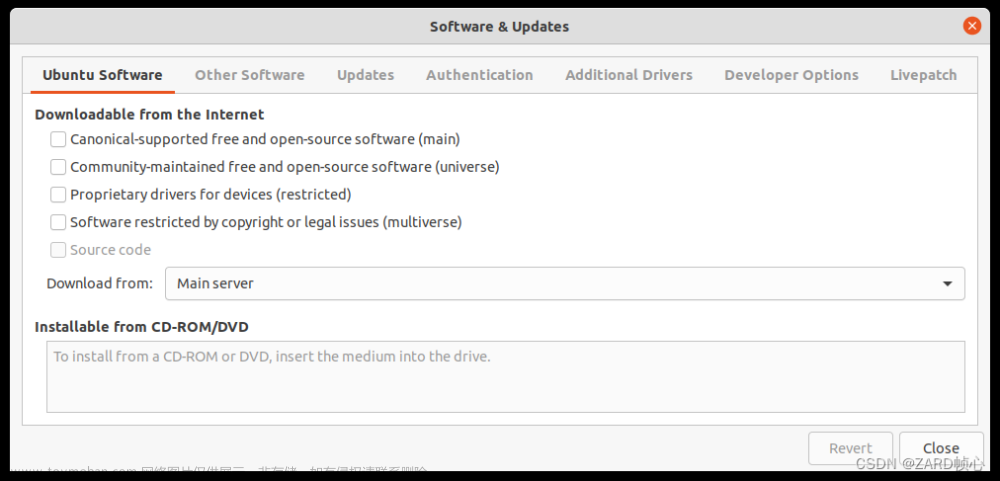
一、ROS的安装
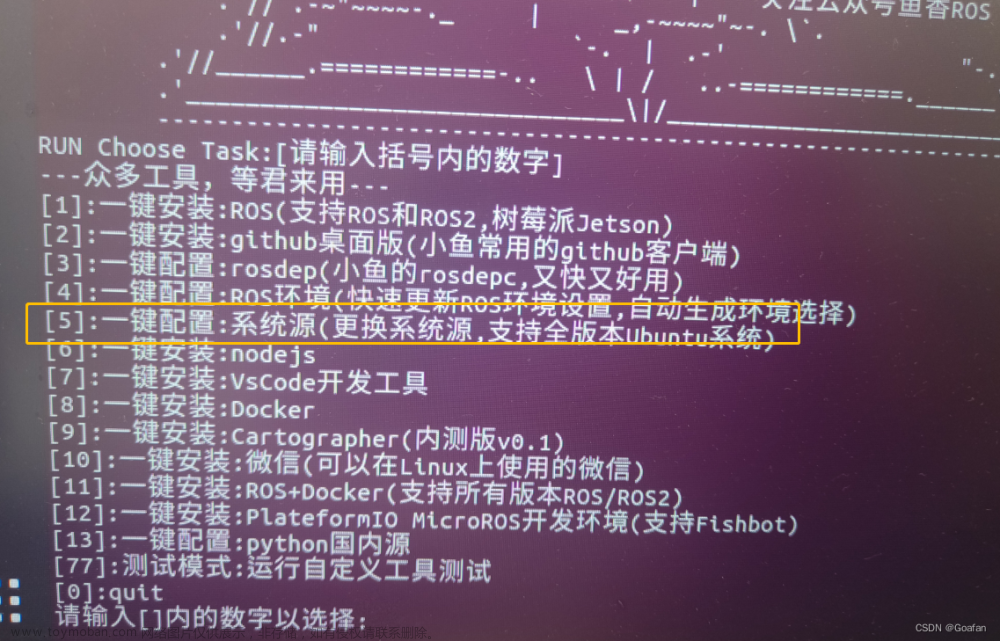
鱼香ROS提供了一个全面且方便的脚本,可以直接运行来安装系统对应版本的ROS,同时也可以使用该命令来安装许多有趣的东西
wget http://fishros.com/install -O fishros && . fishros

二、OpenCV编译安装
本文安装的为无contrib版本的OpenCV
GitHub OpenCV 项目地址
mkdir build
cd build
cmake ..
make -j
sudo make install
在源代码的目录下依次执行上方的命令,第四步cmake的过程中可以增加相关的参数来自定义OpenCV
三、cv_bridge编译安装
cv_bridge 包含在 vision_opencv 当中,需下载对应版本的源码压缩包
mkdir catkin_ws && cd catkin_ws
mkdir src && cd src
catkin_init_workspace
在合适的目录执行上述命令创建相关的catkin 工作目录,将下载的vision_opencv的源代码解压在创建的src目录之下
打开cv_bridge目录下的CMakeLists.txt 文件 修改成自己安装的OpenCV

修改完毕之后回到catkin_ws 目录之下,执行catkin_make操作进行编译
这样就根据我们指定的OpenCV版本编译出了ROS中cv_bridge依赖,往后在通过自己的OpenCV编译项目的时候,先source一下刚编译出来的cv_bridge所在的工作目录或者指定,即可避免出现使用到的OpenCV库与cv_bridge所使用的版本不一样的问题文章来源:https://www.toymoban.com/news/detail-447619.html
四、温馨提示
在下载vision_opencv 的时候一定要选择自己的ROS版本号对应的branch,防止导致编译不兼容的问题。
编译出来的cv_bridge可以直接写在.bashrc当中,下次编译项目的时候找到的默认库即为自己定义的版本文章来源地址https://www.toymoban.com/news/detail-447619.html
到了这里,关于ROS Neotic(Ubuntu 20.04)如何正确安装OpenCV的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!