一,定时器
1)定时器概念
能够对内部时钟信号或外部输入信号进行计数,数值达到设定要求时,向CPU发起中断请求,完成外部程序的运行。
本质就是进行计数,选择内部时钟脉冲,作为计数器时,技术信号的来源选择非周期脉冲信号。
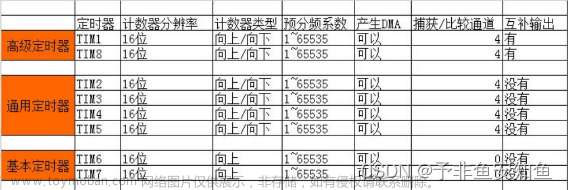
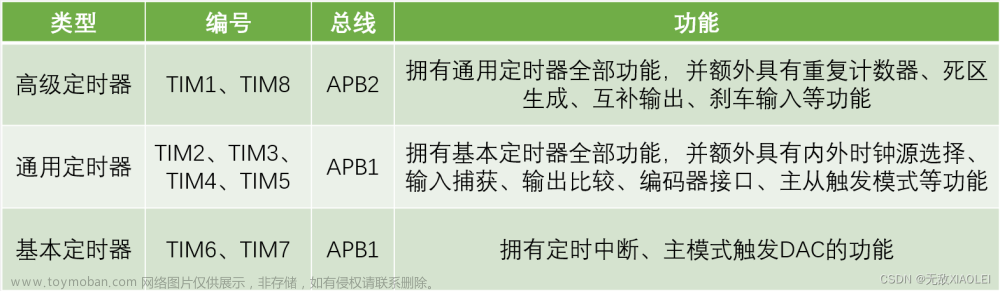
STM32中定时器可分为高级定时器、通用定时器、基本定时器三类,他们都是由一个可编程的16位预分频器(TIMX_PSC)驱动的16位。
2)计数器模式
向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
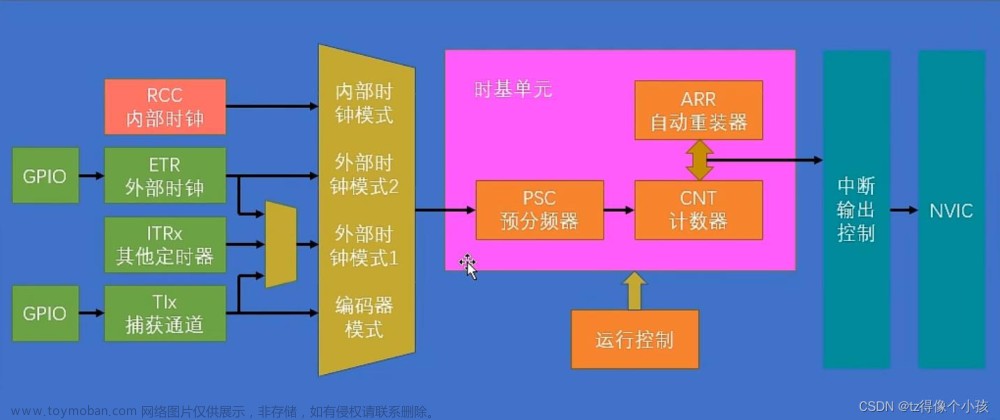
3)工作过程
在选定的时钟源(可以是内部的也可以是外部的)和预分频器TIMX_PSC的驱动下,根据设置的计数模式(向上、向下、中央对齐)自动。
装载计数器TIMX_CNT开始计数;如果使能了相应的事件(更新事件、触发事件、输入捕获、输出比较)则会产生相应的中断。
- 如果没有开启输入和输出,只使能了计数器计数溢出后自动装载,可以做为一个简单定时器使用,计数器自己开始周期计数
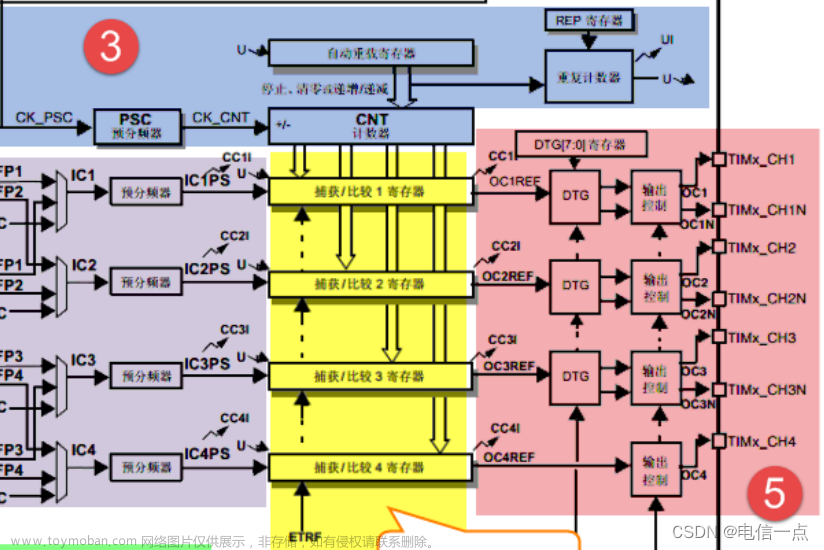
- 如果开启了通道输入捕获,当检测到ICx信号上相应的边沿后,计数器(CNT)的当前值被锁存到捕获/比较寄存器(TIMx_CCRx)中,通过中断的方式可以读取出来假设为
n1,然后更改输入捕获的信号级性(上升沿或下降沿),当再次检测到ICx信号上相应的边沿后,计数器(CNT)的当前值再次被锁存到捕获/比较寄存器(TIMx_CCRx)中假设为
n2;n2 -n1节可算出电平的持续时间 - 如果开启了输出控制,可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的PWM信号。
- 如果选择外部的同步时钟信号(TI1F_ED、TI1FP1、TI2FP2)作为计数器的时钟源,可以用来统计脉冲,实现脉冲频率采集功能
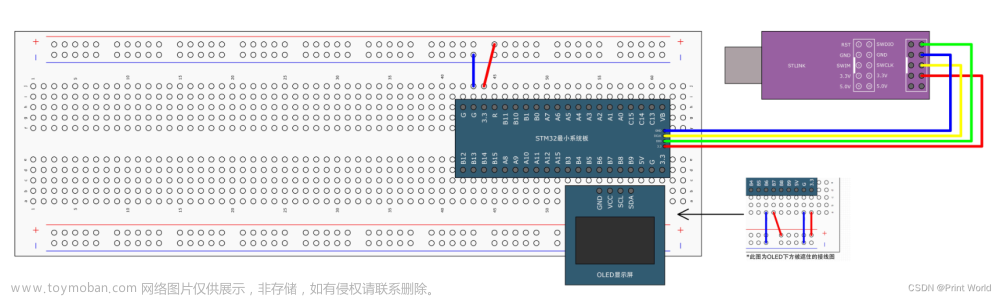
二,串口通信与点灯
1)创建新项目
2)选择芯片
3)配置RCC
4)配置SYS
5)配置IO口输出
6)配置定时器2和定时器3
使用定时器2和定时器3来实现定时的功能。选中定时器2,配置定时器2的时钟源为内部时钟,分频系数为71,向上计数模式,计数周期为5000,使能自动重载模式。

分频系数那里虽然写的是71,但系统处理的时候会自动加上1,所以实际进行的是72分频。由于时钟我们一般会配置为72MHZ,所以72分频后得到1MHZ的时钟。1MHZ的时钟,计数5000次,得到时间5000/1000000=0.005秒。也就是每隔0.005秒定时器2会产生一次定时中断。
7)配置中断
开启定时器2和定时器3的中断。
生成定时器2和定时器3中断优先级配置代码。
8)配置USART
波特率为115200,1位停止位,无校验位
9)时钟配置
10)配置项目
11)生成项目

12)代码
启动定时器
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);

在main.c中定义STM32需要给上位机发送的消息
uint8_t hello[20]="hello windows!\r\n";

定时器中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint32_t time_cnt =0;
static uint32_t time_cnt3 =0;
if(htim->Instance == TIM2)
{
if(++time_cnt >= 400)
{
time_cnt =0;
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_1);
}
}
if(htim->Instance == TIM3)
{
if(++time_cnt3 >= 1000)
{
time_cnt3 =0;
HAL_UART_Transmit(&huart1,hello,20,100000);
}
}
}

13)烧录
引脚:A1–LED灯
三,PWM
1)关于PWM
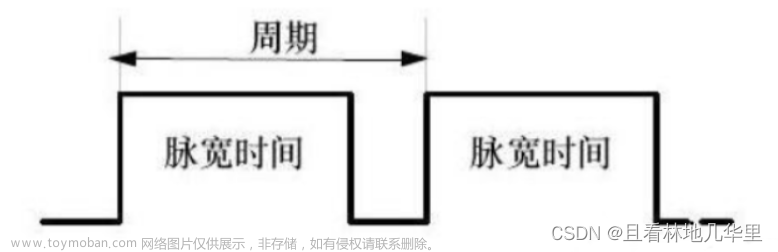
- 含义 PWM(Pulse Width
Modulation)即脉冲宽度调制,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术;它是一种模拟控制方式,根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变。 - 基本原理
PWM就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也可以这样理解,PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。只要带宽足够,任何模拟值都可以使用PWM 进行编码。 - 优点及应用范围
由于其控制简单、灵活和动态响应好等优点而成为电力电子技术应用最广泛的控制方式,其应用领域包括测量,通信,
功率控制与变换,电动机控制、伺服控制、调光、开关电源,甚至某些音频放大器,因此学习PWM具有十分重要的现实意义。
2)PWM产生
STM32的定时器除了TIM6和7,其他的定时器都可以用来产生PWM输出。其中高级定时器TIM1和TIM8可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4路的 PWM 输出,这样,STM32 最多可以同时产生 30 路 PWM 输出。
脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。
3)PWM相关寄存器
包含三个寄存器:
捕获/比较模式寄存器(TIMx_CCMR1/2)
捕获/比较使能寄存器(TIMx_CCER)
捕获/比较寄存器(TIMx_CCR1~4)
设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,最后还要设置TIMx_CR1寄存器的ARPE位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。在TIMx_CCMRx寄存器中的OCxM位写入110(PWM模式1)或111(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。
四,STM32配置PWM输出
1)新建工程
2)选择芯片
3)RCC配置
4)SYS配置
5)配置定时器
我们选择定时器3和定时器4两个定时器
定时器3和定时器4我们的设置一样:通道1选择“PWM Generation CH1”,分频系数为71,计数周期为500,其它默认。设置占空比初始值为10

6)配置中断
开启定时器3和4的中断。生成定时器3和4中断优先级配置代码。

7)设置时钟
8)生成文件
9)代码
uint16_t duty_num3 = 10;
uint16_t duty_num4 = 10;
定义定时器3和4的占空比初始值
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1);
开启定时器3和4并输出PWM
HAL_Delay(50);
duty_num3 = duty_num3 + 10;
duty_num4 = duty_num4 + 10;
if(duty_num3 > 500)
{
duty_num3 = 0;
}
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,duty_num3);
if(duty_num4 > 500)
{
duty_num4 = 0;
}
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_1,duty_num4);
在while函数中设置每隔50毫秒,占空比加10,如果超过500(也就是PWM周期),自动变成0。(即灯会从亮倒暗,逐渐变化)定时中断回调函数。
10)编译烧录
引脚
A6–LED
PB6 – PC13
五,总结
前几次作业中的延时功能都是通过循环、delay/Hal_delay函数等实现的,这一次学习了通过定时器Timer方式实现时间的精准控制,STM32上进行PWM的配置,通过这次学习,对PWM原理及应用有了深入的学习了解。文章来源:https://www.toymoban.com/news/detail-448407.html
六,参考
STM32使用定时器进行串口通信和点灯
使用STM32输出PWM波形
添加链接描述
添加链接描述文章来源地址https://www.toymoban.com/news/detail-448407.html
到了这里,关于定时器&PWM的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!