注:这是我上班第一次学习串口通信,此文章基于STM32F4系列单片机。
一:什么是软件模拟串口通信:
1、平常所用串口通信都是用的单片机外设,是单片机内部自带的模块,只需要配置好初始化就可以使用,在这里老师为了更好的让我们理解其原理所以让我们模拟串口通信;
2、软件模拟串口通信就是用普通IO口作为串口通信的输出端(TX)和接收端(RX),通过写IO口的电平变化来模拟串口通信的TTL协议,以此达成数据通信。
二:串口(串行接口)通信概念:
1、串口不同于普通IO口,它是用来数据传输的接口,串口通信就是串口按位(bit)发送和接收字节,它在接收和发送的时候各只需要一根数据线,而并行通信则需要八根数据线,串口通信同时具有传输距离远的优点,长度可达上千米,而并行通信则很短不能超过20米。
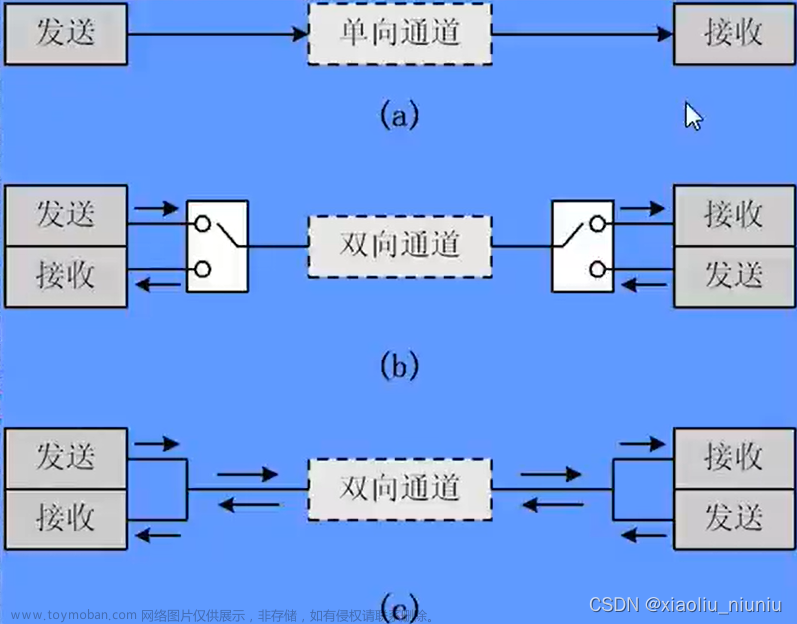
2、串口通信属于异步全双工模式,即可以在发送的同时进行接收,需要两根数据线(发送和接收),同时没有时钟线。

三:串口通信TTL协议:

这是一种规定好的协议,规定:
1、在空闲状态下,电平为高电平;
2、起始位:当电平从空闲的高电平拉低,视为起始位,为协议的开始;
3、数据位:紧接着起始位之后的八位为数据位,每一次传输一个数据,这里指的是二进制位(注意:这是数据传输是倒序传输,例如传输0x01,它的二进制表示为0000 0001,那么这里数据位显示为1000 0000);
4、校验位:数据位之后可能会有校验位,校验位是为了校验此数据发送是否正确,校验方法有奇偶检验、CS和校验等;
5、停止位:当数据发送结束之后,会把电平拉高,此时表示一个数据发送完毕,为停止位。
四、keil软件里配置GPIO、写代码模拟协议(代码附下)
这里配置发送端(TX)的IO口:模式选择输出模式,其他就是GPIO配置的结构体
因为是模拟串口的,所以可以使用任意一个IO口作为发送和接收端
void GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);//使能GPIOD时钟
//GPIOD9初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//发送端TX对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化GPIO
GPIO_SetBits(GPIOD,GPIO_Pin_9);//GPIOD9设置高,灯灭
}
再配置接收端(RX)的IO口:模式要选择输入模式
void GPIO2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);//使能GPIOD时钟
//GPIOD12初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//接收端RX对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化GPIO
GPIO_SetBits(GPIOD,GPIO_Pin_12);//GPIOD12设置高,灯灭
}
在.c文件里写的函数要在.h文件里面声明
开始写函数模拟协议:
#define TX_H GPIO_SetBits(GPIOD,GPIO_Pin_9)
#define TX_L GPIO_ResetBits(GPIOD,GPIO_Pin_9)
//发送一个字节的函数//
void Uart_tx_one_byte (u8 date)
{
int i;
TX_L;
delay_us(104);
for(i=0;i<8;i++)
{
if(date&(0x01<<i))
{
TX_H;
}
else
{
TX_L;
}
delay_us(104);
}
TX_H;
delay_us(104);
}
//发送多个字节//
void Uart_tx_bytes(u8 *pdata ,u8 len)
{
u8 i;
for(i=0;i<len;i++)
{
Uart_tx_one_byte(*(pdata+i));
}
}
主函数里发送一个字节:
int main(void)
{
delay_init();//延时函数初始化//
GPIO_Init();
uart_init(9600);//波特率设置为9600//
while(1)
{
delay_ms(1000);
Uart_tx_one_byte(0x01);//发送0x01//
}
}
发送多个字节:
u8 txbuf[7] = {0x68,0x11,0x00,0x01,0x01,0x13,0x16};
int main(void)
{
delay_init();
GPIO_Init();
uart_init(9600);
while(1)
{
delay_ms(1000);
Uart_tx_bytes (txbuf,7);//将数组中的七个数发送出去//
}
}
接下来是接收部分:
上面我们已经将接收端的IO口配置好了,所以我们直接写代码模拟接收:
#define READ_LEVEL (GPIO_ReadInputDataBit(GPIOD,GPIO_Pin_12))
u8 ret;
u8 revdata,i;
u8 uart_rx(void)
{
ret = READ_LEVEL;
if(ret == 0)
{
delay_us(10);//这里做个小延时,判断以免受到静电或者其他干扰,确保是起始位//
if(!READ_LEVEL)
{
for(i=0;i<8;i++)
{
delay_us(104);
revdata = revdata|(READ_LEVEL<<i);
}
delay_us(104);
if(READ_LEVEL)
{
return 0;//接收成功返回0,其他情况返回0xff//
}
else
{
return 0xff;
}
}
else
{
return 0xff;
}
}
else
{
return 0xff;
}
}
主函数:
int main(void)
{
delay_init();
GPIO_Init();//TX端IO口初始化//
GPIO2_Init();//RX端IO口初始化//
uart_init(9600);
while(1)
{
delay_us(50);
if(uart_rx()==0)
{
Uart_tx_one_byte (0x10);//接收成功之后用TX端发送0x01,以供串口助手观察结果//
}
}
}
最后提醒:所谓串口通信发送指的是单片机发出,而接收指的是外部发送过来,单片机接收,这里是串口助手发送,也叫作上位机。
以上仅为个人学习总结,如有错误、不妥的地方望各位大佬指正,一起学习。
文章来源地址https://www.toymoban.com/news/detail-450001.html
文章来源:https://www.toymoban.com/news/detail-450001.html
到了这里,关于【基于STM32的串口通信----用软件模拟】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!