ε-约束算法
TIME:2022/07/30
Author:雾雨霜星
Web:雾雨霜星的小站
小站原文链接:https://www.shuangxing.top/#/post?id=27
参考
[1]Nima Amjady and Jamshid Aghaei and Heidar Ali Shayanfar. Stochastic Multiobjective Market Clearing of Joint Energy and Reserves Auctions Ensuring Power System Security[J]. IEEE Transactions on Power Systems, 2009, 24(4) : 1841-1854.
[2]J. Aghaei and N. Amjady and H.A. Shayanfar. Multi-objective electricity market clearing considering dynamic security by lexicographic optimization and augmented epsilon constraint method[J]. Applied Soft Computing Journal, 2011, 11(4) : 3846-3858.
简介
用于计算多目标数学问题的一种计算方法。
选取一个主目标函数,将其余目标函数转化为约束,从而计算每个子优化目标,得到帕累托解集。
方法
原多目标优化问题如下:
min
{
f
1
(
x
)
,
f
2
(
x
)
,
.
.
.
,
f
n
(
x
)
}
h
(
x
)
=
0
g
(
x
)
≤
0
\min \{f_{1}(x),f_{2}(x),...,f_{n}(x)\}\\ h(x)=0\\ g(x)\leq0
min{f1(x),f2(x),...,fn(x)}h(x)=0g(x)≤0
使用ε约束算法转化问题为:
min
f
1
(
x
)
f
2
(
x
)
≤
ϵ
2
,
.
.
.
,
f
n
(
x
)
≤
ϵ
n
h
(
x
)
=
0
g
(
x
)
≤
0
\min f_{1}(x)\\ f_{2}(x)\leq \epsilon_{2} ,...,f_{n}(x)\leq \epsilon_{n}\\ h(x)=0\\ g(x)\leq0
minf1(x)f2(x)≤ϵ2,...,fn(x)≤ϵnh(x)=0g(x)≤0
得到多个待优化的子问题,每个子问题得到一个解加入帕累托解集,最终从帕累托解集中选取一个最优解。
其中的参数 ϵ 2 \epsilon_{2} ϵ2,…, ϵ n \epsilon_{n} ϵn通过计算payoff table后得到。
payoff table的计算:
-
求解出第 i i i个目标函数的最优值 f i ( x i ∗ ) f_{i}(x_{i}^{*}) fi(xi∗),得到其最优解 x i ∗ x_{i}^{*} xi∗。
-
将 x i ∗ x_{i}^{*} xi∗代入其他目标函数得到 { f 1 ( x i ∗ ) , f 2 ( x i ∗ ) , . . . , f n ( x i ∗ ) } \{f_{1}(x_{i}^{*}),f_{2}(x_{i}^{*}),...,f_{n}(x_{i}^{*})\} {f1(xi∗),f2(xi∗),...,fn(xi∗)}。
-
对全部目标函数按照上述流程求解,得到payoff table矩阵如下:
( f 1 ( x 1 ∗ ) . . . f i ( x 1 ∗ ) . . . f n ( x 1 ∗ ) ⋮ ⋱ ⋮ f 1 ( x i ∗ ) . . . f i ( x i ∗ ) . . . f n ( x i ∗ ) ⋮ ⋱ ⋮ f 1 ( x n ∗ ) . . . f i ( x n ∗ ) . . . f n ( x n ∗ ) ) \begin{pmatrix} f_{1}(x_{1}^{*})&...&f_{i}(x_{1}^{*})...&f_{n}(x_{1}^{*})\\ \vdots&\ddots&&\vdots\\ f_{1}(x_{i}^{*})&...&f_{i}(x_{i}^{*})...&f_{n}(x_{i}^{*})\\ \vdots&\ddots&&\vdots\\ f_{1}(x_{n}^{*})&...&f_{i}(x_{n}^{*})...&f_{n}(x_{n}^{*}) \end{pmatrix} f1(x1∗)⋮f1(xi∗)⋮f1(xn∗)...⋱...⋱...fi(x1∗)...fi(xi∗)...fi(xn∗)...fn(x1∗)⋮fn(xi∗)⋮fn(xn∗)
优化过程:
-
此时可从payoff table矩阵中对每个目标函数得到最优解(U)和最劣解(SN): f i U = f i ( x i ∗ ) , f i S N = f i ( x j ∗ ) f_{i}^{U}=f_{i}(x_{i}^{*}),f_{i}^{SN}=f_{i}(x_{j}^{*}) fiU=fi(xi∗),fiSN=fi(xj∗)。
-
根据决策者的偏好,选取一个主目标函数 f k ( x ) f_{k}(x) fk(x)。
-
对于主目标函数外的目标函数 f i ( x ) f_{i}(x) fi(x),设置一个网格化分数 q i j ∈ { 1 , 2 , . . . , q i , m a x } q_{ij}\in\{1,2,...,q_{i,max}\} qij∈{1,2,...,qi,max}。与网格搜索法本质相同。
-
由此计算除了主目标函数外的其余目标函数的ε约束如下:
ϵ i j = f i S N − ( f i S N − f i U q i j ) ⋅ j j = 1 , 2 , . . . , q i , m a x \epsilon_{ij}=f_{i}^{SN}-(\frac{f_{i}^{SN}-f_{i}^{U}}{q_{ij}})\cdot j\quad j=1,2,...,q_{i,max} ϵij=fiSN−(qijfiSN−fiU)⋅jj=1,2,...,qi,max
因此每个目标函数 f i ( x ) f_{i}(x) fi(x)会存在 q i , m a x q_{i,max} qi,max个约束,由此得到优化子问题共计 ∏ i = 0 , i ≠ k n q i , m a x \prod_{i=0,i\neq k}^{n}q_{i,max} ∏i=0,i=knqi,max个。 -
得到每个优化子问题如下:
min f k ( x ) subject to f 1 ( x ) ≤ ϵ 1 j , f 2 ( x ) ≤ ϵ 1 l , . . . , f n ( x ) ≤ ϵ 1 m , h ( x ) = 0 , g ( x ) ≤ 0 \min f_{k}(x)\\ \text{subject to}\quad f_{1}(x)\leq\epsilon_{1j},f_{2}(x)\leq\epsilon_{1l},...,f_{n}(x)\leq\epsilon_{1m},h(x)=0,g(x)\leq0 minfk(x)subject tof1(x)≤ϵ1j,f2(x)≤ϵ1l,...,fn(x)≤ϵ1m,h(x)=0,g(x)≤0
其中, j = 1 , 2 , . . , q 1 , m a x ; l = 1 , 2 , . . , q 2 , m a x ; . . . ; m = 1 , 2 , . . , q n , m a x ; j=1,2,..,q_{1,max};l=1,2,..,q_{2,max};...;m=1,2,..,q_{n,max}; j=1,2,..,q1,max;l=1,2,..,q2,max;...;m=1,2,..,qn,max; -
每次求出一个最优解,若在可行域内则加入帕累托解集,若不在可行域内则丢弃。
特点:
约束方法的一个理想特征是,我们可以通过适当地将值分配给 q i j q_{ij} qij来控制有效集表示的密度。网格点的数量越高,有效集的表示越密集,但计算时间越长。在有效集的密度和计算时间之间进行权衡总是可取的。
============================================================================
2023-08-29更新:
由于该文较为热门,很多人私信询问我的代码,因此我将自己的代码加入了文章中,方便各位学习,如有引用和转载此文章,请在文中进行说明标注此文出处。文章来源:https://www.toymoban.com/news/detail-450101.html
# 说明:
# 1. 进行多目标优化,目标函数为:综合投资成本(ainv)、投资回收期(pb)、系统不确定适应度(a)。
# 2. 此处ε-约束法所得的每个子优化问采用Gurobi进行求解。
# 3. 默认系统不确定适应度a目标函数最劣为0,最优为1。
# 4. 由于此处我的Gurobi进行计算需要提供系统不确定适应度,因此默认以a=0的最劣来求其余目标函数的最优情况。
# 5. 选取不确定适应度a作为ε-约束算法的主目标函数。
# ----------------- 主程序 ----------------
# 记录开始时间
time_start = time.time()
# 非主目标函数的目标函数网格化参数(即上文所说的网格化分数qij)
ainv_Q = 10
pb_Q = 10
# 所求解的集合
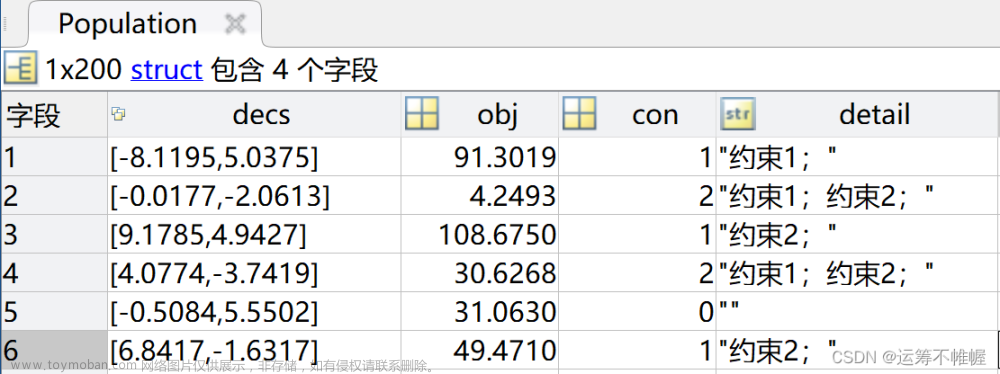
solution_pool = []
# 初始化 ξ约束法的payoff矩阵
ainv_targetValue = []
pb_targetValue = []
a_targetValue = []
# ε-约束算法首先需要得到各个目标函数的最优和最劣,最劣从其他目标函数最优时将变量代入计算该目标得到
# ainv最优
td = ainv_gbm(a=0) # ainv_gbm是计算ainv单目标优化的Gurobi函数
ainv_targetValue.append(td['annual_inv']) # td['annual_inv']是ainv_gbm函数Gurobi优化结果中ainv的值
pb_targetValue.append(td['pb']) # td['pb']是ainv_gbm函数Gurobi优化结果中pb的值
a_targetValue.append(0)
# pb最优
td = pb_gbm(a=0) # pb_gbm是计算pb单目标优化的Gurobi函数
ainv_targetValue.append(td['annual_inv'])
pb_targetValue.append(td['pb'])
a_targetValue.append(0)
# a最优(此处是为了得到a最优下的ainv和pb的值用于构建payoff矩阵)
td, o_flag = igdt_gbm() # igdt_gbm是计算a单目标优化的Gurobi函数
ainv_targetValue.append(td['annual_inv'])
pb_targetValue.append(td['pb'])
a_targetValue.append(td['a']) # td['a']是igdt_gbm函数Gurobi优化结果中a的值
# 获取最优值与最劣值
annualInv_U = min(ainv_targetValue)
annualInv_SN = max(ainv_targetValue)
paybackPeriod_U = min(pb_targetValue)
paybackPeriod_SN = max(pb_targetValue)
print("=======================================")
print("annualInv_U:", annualInv_U)
print("annualInv_SN:", annualInv_SN)
print("paybackPeriod_U:", paybackPeriod_U)
print("paybackPeriod_SN:", paybackPeriod_SN)
print("=======================================")
# ξ约束模型求解开始
for q1 in range(ainv_Q):
for q2 in range(pb_Q):
# 指示程序进展
print('the ξ gens:', q1, q2)
# 获取本轮ξ约束
annualInv_target_c = annualInv_SN - (annualInv_SN - annualInv_U) / ainv_Q * q1
paybackPeriod_target_c = paybackPeriod_SN - (paybackPeriod_SN - paybackPeriod_U) / pb_Q * q2
# 子优化问题的求解
# 通过传入annualInv_target_c与paybackPeriod_target_c在Gurobi内构建约束
td_e, flag_e = igdt_gbm(ainv_c=annualInv_target_c, pb_c=paybackPeriod_target_c)
# flag_e 是标志Gurobi求解是否有解的变量
if not flag_e: continue
# 更新所求解集合
else: solution_pool.append([td_e['annual_inv'], td_e['pb'], 1 - td_e['a']])
# 记录结束时间
time_end = time.time()
time_sum = time_end - time_start
后续对所得解集合进行非支配排序即可得到帕累托解集。
具体帕累托解集中选取最优解,可参考模糊决策方法:
https://www.shuangxing.top/#/post?id=29文章来源地址https://www.toymoban.com/news/detail-450101.html
到了这里,关于【多目标规划问题求解】ε-约束算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!