要点
- 公式:

- 公式:

一、电子齿轮比
1.什么是电子齿轮比?
电子齿轮比一般是利用旋转轴装配的角度编码器或旋转编码器的分度功能,使用数控或驱动装置中的计数功能,使两轴按一定比例旋转,这就是电子齿轮比。伺服受到上位机的脉冲频率进行放大/缩小。分子大于分母就是放大,相反就是缩小。分子为电机编码器反馈脉冲。分母为上位机指令脉冲。
2.作用
1)可以任意地设置每单位指令脉冲对应的电机的速度和位移量 (脉冲当量);
2)当上位控制器的脉冲发生能力 (最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能 (指令脉冲倍频)来对指令脉冲进行×N倍频。
二、脉冲当量
编码器发送一个脉冲机械结构移动多少距离(即移动精度),也称1指令单位。例如输出一个脉冲移动0.001毫米。
注意:脉冲当量只与丝杠的螺距、减速比、电子齿轮比有关。编码器的脉冲只是反馈最用,与当量无关。
三、减速比
减速器输入转速与输出转速的比值,简单说就是从动轮与主动轮的比值。
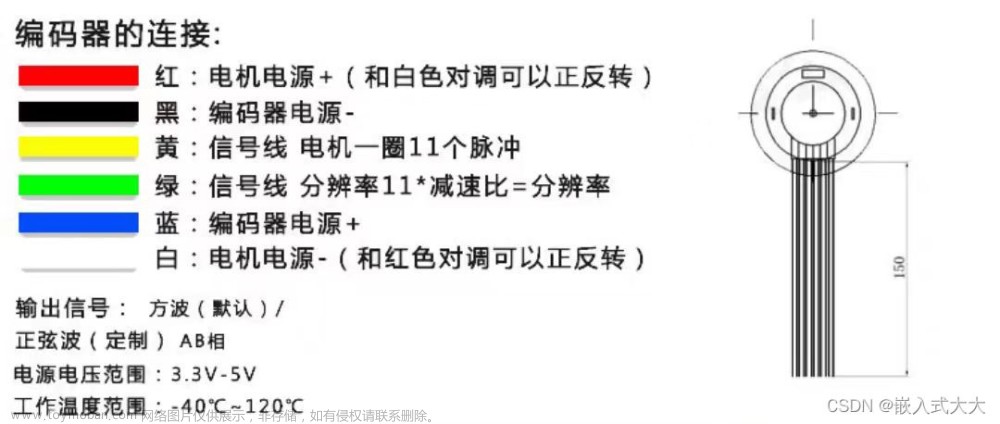
四、编码器分辨率
伺服旋转一圈所需要的脉冲数。
五、负载结构的分类
1)滚珠丝杠
旋转一圈=节距/指令单位

2)传送带
旋转一圈=(π*滑轮直径)/指令单位

3)旋转台
旋转一圈=360/指令单位

六、计算每转脉冲数和电子齿轮比步骤
1)确认负载结构属于哪一类
2)确认编码器脉冲数、减速比、指令单位
3)利用公式求出电子齿轮比
七、案例
1.丝杠螺距D=10㎜,编码器分辨率4096,要求系统当量(精度)1毫米,问电子齿轮比是多少?
脉冲当量=(10*1000)/4096
电子齿轮比=1/脉冲当量
2.电机额定转速6000 r/min。上位输出频率100KHZ,编码器分辨率4096,问额定转速下电子齿轮比是多少?

3.电机额定转速2000r/min,上位输出频率为100KHZ,减速比 4/1。 螺距10㎜,编码器分辨率4096,脉冲当量1μm/pls。问电子齿轮比?
1:1脉冲当量=(10*1000)/4096*4=0.610μm/pls
电子齿轮比=1/0.610=1.639
最大转速=(60/4096)*1.639*10*1000=240.087 r/min
输出频率=(100*2000)/240.087=833.031KHZ
转载声明文章来源:https://www.toymoban.com/news/detail-450340.html
凡未声明为转载的内容,均属于“呆萌君”公众号独家版权所有,未经许可不得转载或镜像;授权转载必须注明来源为"呆萌君"。未经授权擅自复制或镜像,违者必究。。。。。文章来源地址https://www.toymoban.com/news/detail-450340.html
到了这里,关于伺服电机电子齿轮比与脉冲当量如何计算的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!