红外避障模块

模块原理图:
电路分析如下:
LM393电压比较器的功能:比较两个电压的大小(用输出电压的高低表示两个输入电压的大小关系):
当+输入端电压高于-输入端时,电压比较器输出高电平;
当+输入端电压低于-输入端时,电压比较器输出低电平。
VR1是一个电位器,我们通过调整电位器VR1给 LM393电压比较器 的 1(-)脚提供一个阈值电压,这个电压值的大小可以根据实际情况来调试确定。而红外对管(发射管与接收管)(发光二极管与光敏三级管结合,构成光耦合器)。
发射管先发送红外信号,光敏三极管收到物体反射回来的红外光(信号)的时候,会产生电流,并且随着红外光的从弱变强,电流会从小变大。
1)当没有接收到红外光或者说红外光很弱的时候,光敏三极管截止,2(+)脚的电压就会接近 VCC,如果 2(+)脚比 1(-)脚的电压高的话,通过 LM393 比较器后,接收检测引脚D0输出一个高电平,使指示灯熄灭。
2)当收到的红外光较强的时候,光敏三级管会导通,随着光强变大,电流变大,2(+)脚的电压值等于 VCC-I*R(10k),电压就会越来越小,当小到一定程度,比 1(-)脚的电压还小的时候,通过 LM393 比较器后,接收检测引脚就会变为低电平,使指示灯点亮。
总结:有障碍物–>低电平;无障碍物–>高电平。
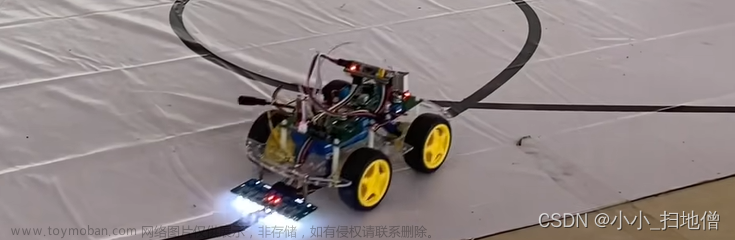
有障碍物–>低电平–>左右电机反向转动,小车后退(不能直线后退,否则可能会陷入后退前进的死循环);无障碍物–>高电平–>左右电机正向转动,小车前进。
发射管先发送红外信号,红外信号会随着传送距离的加大逐渐衰减,如果遇到障碍物,就会形成红外反射。当反射回来的信号比较弱时,接收检测引脚输出高电平,说明障碍物比较远;当反射回来的信号比较强,接收检测引脚输出低电平,说明障碍物比较近了。
红外循迹模块

模块原理图:

电路分析: 以第一路为例。主控板上的LM339电压比较器比较红外对管第一路中的两个引脚((IN1+)、(IN1-))电压输出电平OUT1。其中(IN1+)为探头输出的电压、(IN1- )为电位器调节的电压输入端。
VR1是一个电位器,我们通过调整主控板上的电位器VR1给 LM393电压比较器 的 (IN1-)脚提供一个阈值电压,这个电压值的大小可以根据实际情况来调试确定。当 (IN1-)电压>(IN1+)电压时,对应的 OUT1 输出的电平电压接近 0v,此时,主控板对应的 LED 灯会点亮;当(IN1-)电压<(IN1+)电压时,对应的OUT1 输出的电平电压接接近 5v,此时 ,主控板 对应的 LED 灯会熄灭。
1)当没有接收到红外光或者说红外光很弱的时候,D5光敏二极管截止,(IN1+)脚的电压就会接近 VCC,如果 5(IN1+)脚电压比4 (IN1-)脚电压高的话,通过 LM393 比较器后,主控板输出引脚OUT1输出一个高电平,使指示灯熄灭。
2)当收到的红外光较强的时候,光敏二级管会导通,随着光强变大,电流变大,5(IN1+)脚的电压就会等于 VCC-I*R5,电压就会越来越小,当小到一定程度,比 4(IN1-)脚的电压还小的时候,通过 LM393 比较器后,主控板输出引脚OUT1输出一个低电平,使指示灯点亮。
总结:黑色吸收红外光–>红外光弱–>输出高电平,白色反射红外光–>红外光强–>输出低电平文章来源:https://www.toymoban.com/news/detail-450446.html
D1红外发射管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,D5红外接收管一直处于关断状态,此时模块的 TTL 输出端为高电平,相应指示二极管一直处于熄灭状态;当被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管导通,此时模块的 TTL 输出端为低电平,指示二极管被点亮。文章来源地址https://www.toymoban.com/news/detail-450446.html
到了这里,关于红外循迹与避障原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!