如何使用PID调谐器自动调优PID控制器块?
模型下载:
转速闭环
一.PID调谐器的介绍
PID调谐器提供了一种快速和广泛适用的 single-loop PID通过Simulink控制块的整定方法。通过这种方法,可以调优PID控制器参数,以实现具有所需响应时间(response time)的鲁棒(robust)设计。
PID调谐器的典型设计工作流程包括以下步骤:
1.启动PID调谐器。当启动时,该软件自动从Simulink模型计算线性移植模型,并设计初始化控制器。
2.在PID调谐器中通过手动调整两种设计模式下的设计准则对控制器进行整定。调谐器计算鲁棒性稳定系统的PID参数。
3.将设计好的控制器参数导出到PID控制器块,在Simulink中验证控制器性能。
二.打开模型
打开一个带有PID控制模块的转速控制工程:
open_system(‘scdspeedctrlpidblock’)
三.设计概述
转速工程中的PI控制,目标:
1.建立时间(Settling time)小于5秒
建立时间(settling time)就是对于一个振荡的信号稳定到指定的最终值所需要的时间
2.阶跃参考输入的稳态误差为零。
在Simulink中PI控制的反馈环节可以稳定反馈循环并实现良好的参考跟踪性能。
四. PID设计
1.当打开PID调谐器,可以看到一个线性模型,可自动识别输入和输出,并使用当前的工作点进行线性化处理,可以有任意的延迟和修改。
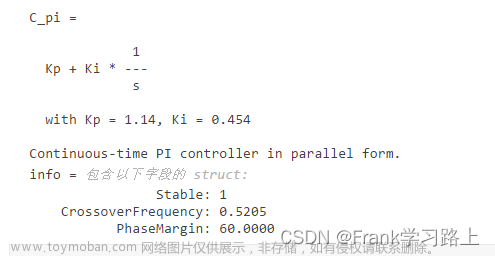
2.PID调谐器计算一个初始PI控制器的值,以实现性能和鲁棒性之间的合理权衡。默认情况下,可以显示跟踪性能。
通过查看参数可以设置P与I的值,可以查看性能和鲁棒性,如下2秒的建立时间,满足要求。
参考跟踪响应的超调量约为7.5%。因为在到达建立时间限制之前我们还有一些空间,你可以通过增加响应时间来减少超调。将响应时间滑块向左移动以增加闭环响应时间。
注意,当调整响应时间,响应图、控制器参数和性能测量会更新。
下图显示了一个经过调整的PID,超调为零,建立时间为4秒。控制器有效地成为一个纯积分控制器。
响应时间从0.618调整到了3.1
P变成0,超调接近0
性能权衡:
1.为了实现零超调,同时将稳定时间减少到2秒以下,需要利用两个滑块。您需要使控制响应更快,以减少建立时间和增加鲁棒性,以减少超调。例如,可以将响应时间从3.1秒减少到1.5秒,并将鲁棒性从0.6增加到0.72。
下图调节过后的闭环响应:

五.将调优参数写入PID控制器块
当你对线性模型上的控制器性能感到满意后,你可以在非线性模型上测试设计。要做到这一点,单击PID调谐器中的更新。这个动作将参数写回Simulink模型中的PID控制器块。
六.完成设计
调节前,采样时间和转速的关系:
闭环系统响应如下: 文章来源:https://www.toymoban.com/news/detail-450479.html
文章来源:https://www.toymoban.com/news/detail-450479.html
结果表明,PI控制器满足设计要求
bdclose(‘scdspeedctrlpidblock’)文章来源地址https://www.toymoban.com/news/detail-450479.html
到了这里,关于【Simulink】仿真_PID控制器调谐/调参/整定的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!