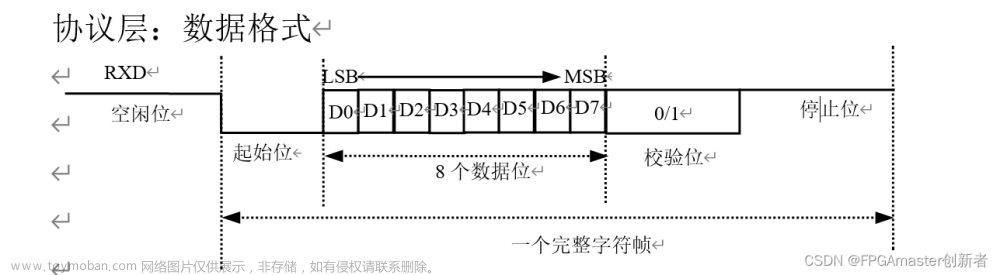
handshake握手电路
- 跨时钟域处理是个很庞大并且在设计中很常出现的问题
- 握手(handshake)是用来处理信号跨时钟域传递的一个有效的方法
- 使用握手协议方式处理跨时钟域数据传输,只需要对双方的握手信号(req和ack)分别使用脉冲检测方法进行同步
- req与ack就和TCP传输之前的三次握手协议类似,是一种有来有往的信息请求与应答
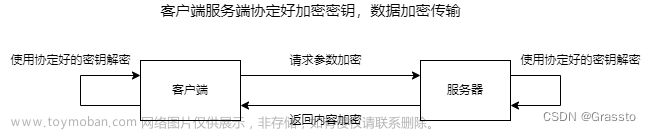
- 具体实现中
- 假设req、ack、data总线在初始化时都处于无效状态,发送域先把数据放入总线,随后发送有效的req信号给接收域
- 接收域在检测到有效的req信号后锁存数据总线,然后回送一个有效的ack信号表示读取完成应答
- 发送域在检测到有效ack信号后撤销当前的req信号,接收域在检测到req撤销(需要进行边沿检测)后也相应撤销ack信号,此时完成一次正常握手通信
- 此后,发送域可以继续开始下一次握手通信,如此循环
- 该方式能够使接收到的数据稳定可靠,有效的避免了亚稳态的出现,但控制信号握手检测会消耗通信双方较多的时间
使用握手信号实现跨时钟域数据传输
- 题目来源于牛客网刷题库
- https://www.nowcoder.com/practice/2bf1b28a4e634d1ba447d3495134baac
接口信号图
 文章来源:https://www.toymoban.com/news/detail-450617.html
文章来源:https://www.toymoban.com/news/detail-450617.html
题目描述
- 分别编写一个数据发送模块和一个数据接收模块,模块的时钟信号分别为clk_a,clk_b
- 两个时钟的频率不相同。数据发送模块循环发送0-7,在每个数据传输完成之后,间隔5个时钟,发送下一个数据,在两个模块之间添加必要的握手信号,保证数据传输不丢失
- data_req和data_ack的作用说明:
- data_req表示数据请求接受信号,当data_out发出时,该信号拉高,在确认数据被成功接收之前,保持为高,期间data应该保持不变,等待接收端接收数据
- 当数据接收端检测到data_req为高,表示该时刻的信号data有效,保存数据,并拉高data_ack
- 当数据发送端检测到data_ack,表示上一个发送的数据已经被接收,撤销data_req,然后可以改变数据data,等到下次发送时,再一次拉高data_req
解题思路
- 分别编写数据发送模块与数据接收模块
- 对于数据发送模块
- 数据发送模块会向数据接收模块发送req请求,表示数据已经准备好,可以发送给接收模块
- 收到接收模块的ack应答信号,表示数据接收模块同时已经接收到数据,此时需要撤销req请求,改变发送数据data,准备下一次的发送
- 对于数据接收模块
- 数据接收模块收到数据发送模块的req信号之后,皆可以进行数据data的接收
- 当数据接收模块将data接收保存之后,就需要向数据发送模块返回ack信号,表示当前数据data已成功接收,无需继续保持,可以准备下一个要传输的数据了
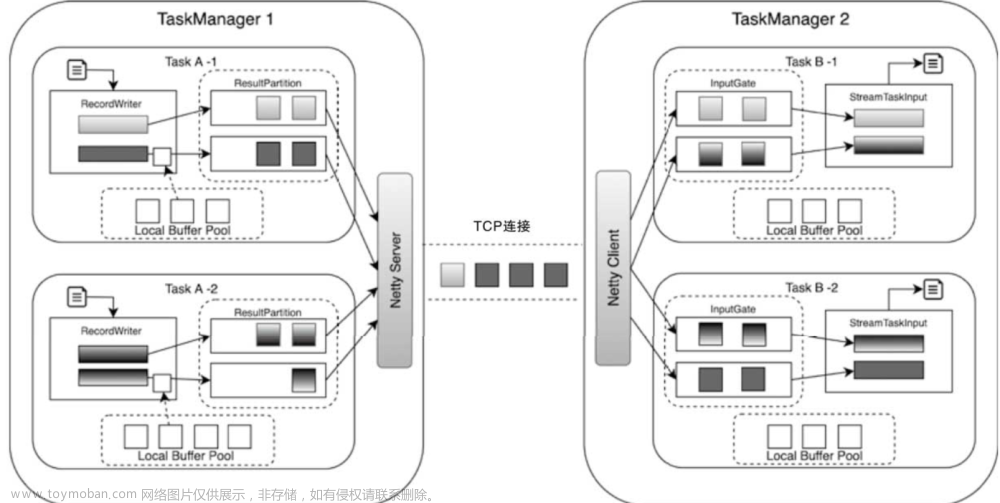
- 对于两模块的跨时钟问题
- 由于两模块具有不同的时钟域,故在进行数据传递时,若直接使用接收到的信号,会产生亚稳态问题,故在两个模块中都需要对不同时钟域传递而来的信号进行同步
代码设计
数据发送模块data_driver
`timescale 1ns/1ns
// 数据发送模块
module data_driver(
input clk_a,
input rst_n,
input data_ack,
output reg [3:0] data,
output reg data_req
);
reg data_ack_1;
reg data_ack_2;
reg [2:0] count;
// 打两拍消除亚稳态
always @(posedge clk_a or negedge rst_n) begin
if (~rst_n) begin
data_ack_1 <= 1'b0;
data_ack_2 <= 1'b0;
end else begin
data_ack_1 <= data_ack;
data_ack_2 <= data_ack_1;
end
end
// 输出数据data
always @(posedge clk_a or negedge rst_n) begin
if (~rst_n) begin
data <= 4'b0;
end else if (data_ack_1 && !data_ack_2) begin
if (data == 4'd7) begin
data <= 4'd0;
end else begin
data <= data + 1;
end
end else begin
data <= data;
end
end
// count计数模块
always @(posedge clk_a or negedge rst_n) begin
if (~rst_n) begin
count <= 3'b0;
end else if (data_ack_1 && !data_ack_2) begin
count <= 3'b0;
end else if (data_req) begin
count <= count;
end else begin
count <= count + 1;
end
end
// data_req信号
always @(posedge clk_a or negedge rst_n) begin
if (~rst_n) begin
data_req <= 1'b0;
end else if (count == 3'b100) begin
data_req <= 1'b1;
end else if (data_ack_1 && !data_ack_2) begin
data_req <= 1'b0;
end else begin
data_req <= data_req;
end
end
endmodule
数据接收模块data_receiver
`timescale 1ns/1ns
// 数据接收模块
module data_receiver(
input clk_b,
input rst_n,
input [3:0] data,
input data_req,
output reg data_ack
);
reg data_req_1;
reg data_req_2;
reg [3:0] data_in;
// 打两拍消除亚稳态
always @(posedge clk_b or negedge rst_n) begin
if (~rst_n) begin
data_req_1 <= 1'b0;
data_req_2 <= 1'b0;
end else begin
data_req_1 <= data_req;
data_req_2 <= data_req_1;
end
end
// data_ack信号
always @(posedge clk_b or negedge rst_n) begin
if (~rst_n) begin
data_ack <= 1'b0;
end else if (data_req_1) begin
data_ack <= 1'b1;
end else begin
data_ack <= 1'b0;
end
end
// 接收data数据到data_in
always @(posedge clk_b or negedge rst_n) begin
if (~rst_n) begin
data_in <= 4'b0;
end else if (data_req_1 && !data_req_2) begin
data_in <= data;
end else begin
data_in <= data_in;
end
end
endmodule
testbench
`timescale 1ns / 1ps
`include "data_driver.v"
`include "data_receiver.v"
module tb_handshake;
// data_driver Parameters
parameter PERIOD1 = 10;
parameter PERIOD2 = 20;
// data_driver Inputs
reg clk_a = 0 ;
reg rst_n = 0 ;
// data_receiver Inputs
reg clk_b = 0 ;
wire [3:0] data;
initial
begin
forever #(PERIOD1/2) clk_a=~clk_a;
end
initial
begin
forever #(PERIOD2/2) clk_b = ~clk_b;
end
initial
begin
#(PERIOD1*2) rst_n = 1;
end
data_driver u_data_driver (
.clk_a ( clk_a ),
.rst_n ( rst_n ),
.data_ack ( data_ack ),
.data ( data [3:0] ),
.data_req ( data_req )
);
data_receiver u_data_receiver (
.clk_b ( clk_b ),
.rst_n ( rst_n ),
.data ( data [3:0] ),
.data_req ( data_req ),
.data_ack ( data_ack )
);
initial
begin
$dumpfile("handshake.vcd");
$dumpvars;
#1000
$finish;
end
endmodule
波形
 文章来源地址https://www.toymoban.com/news/detail-450617.html
文章来源地址https://www.toymoban.com/news/detail-450617.html
- 波形解释
- 按照题目要求,data循环发送0~7
- 按照题目要求,在一个data成功发送后,需要间隔5个时钟周期,在data_req信号由高到低再到高,中间间隔为5个clk_a周期,即为5个数据发送模块的时钟间隔
- 从整个系统的宏观角度进行观测
- 在clk_a时钟下的data_req拉高发送请求后,clk_b时钟下的data_ack拉高表示数据已接收,紧接着data_req拉低进行数据准备阶段的间隔
- 在clk_b时种下的data_ack拉高发送反馈后,clk_a时钟下的data_req拉低表示当前数据已停止发送,紧接着data_ack持续拉高表示可以发送新数据
- 从数据发送端进行观测
- 发送数据的同时,data_req持续拉高,表示正在持续进行当前数据的发送,当接收到data_ack信号后,data_req拉低并停止当前数据的发送,准备新数据
- 固定间隔之后,再次进行数据的请求发送与数据发送
- 从数据接收端进行观测
- 收到data_req信号,开始接收发送来的data数据,当数据成功接收保存后,返回data_ack表示可以接收新数据
- 反馈data_ack信号的一段时间后,会重新接收到data_req信号表示新数据已经发送,开始新一轮的数据接收工作
到了这里,关于【Verilog】握手信号实现跨时钟域数据传输-handshake的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!