原理
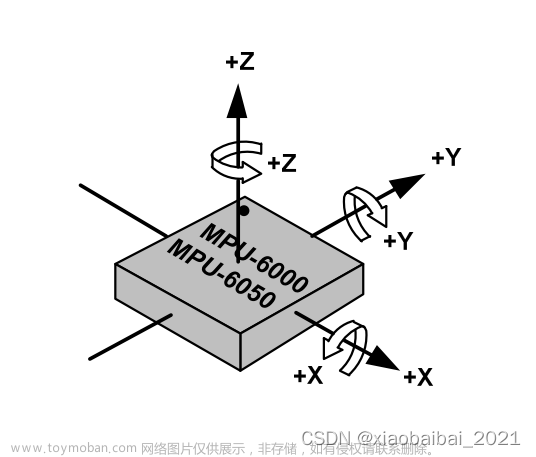
三轴陀螺仪可以测量载体在三个轴上的角速度分量,对这些角速度进行积分就可以得到旋转的角度,应用到载体上就可以得到载体的姿态。
方法
假设导航坐标系为东北天,载体坐标系为右前上。
初始载体坐标系和导航坐标系重合,对应的四元数为q=[1,0,0,0],使用此四元数表示载体在导航坐标系下的旋转。
三轴陀螺仪测量的三个角速度分量可以合成一个角速度向量,可以理解为载体绕着这个角速度向量进行旋转,旋转的角度为角速度向量模的积分。
设 g y r o → = [ ω x b ω y b ω z b ] \overrightarrow{gyro}=\begin{bmatrix} \omega_{xb} \\ \omega_{yb} \\ \omega_{zb} \end{bmatrix} gyro= ωxbωybωzb 为陀螺仪测得的载体旋转的角速度向量,时间间隔为 d t dt dt,则旋转向量为
ω b → = [ ω x b ω y b ω z b ] ⋅ d t \overrightarrow{\omega_{b}} =\begin{bmatrix} \omega_{xb} \\ \omega_{yb} \\ \omega_{zb} \end{bmatrix} \cdot dt ωb= ωxbωybωzb ⋅dt
将其转换到导航坐标系
ω
n
→
=
q
⊗
ω
b
→
⊗
q
∗
\overrightarrow{\omega_{n}}=q\otimes\overrightarrow{\omega_{b}}\otimes q^{*}
ωn=q⊗ωb⊗q∗
其中 ω n → \overrightarrow{\omega_{n}} ωn为旋转轴, ∣ ω n → ∣ \left | \overrightarrow{\omega_{n}} \right | ωn 为旋转的角度 θ \theta θ,转换成四元数为
q ′ = [ sin ( θ 2 ) ω → ⋅ sin ( θ 2 ) ] q^{'}= \begin{bmatrix} \sin(\frac{\theta}{2}) & \overrightarrow{\omega} \cdot \sin(\frac{\theta}{2})\\ \end{bmatrix} q′=[sin(2θ)ω⋅sin(2θ)]
其中
ω
n
→
\overrightarrow{\omega_{n}}
ωn需要归一化,将其应用到初始四元数即可得到当前姿态的四元数
q
=
q
′
⊗
q
q = q^{'} \otimes q
q=q′⊗q
以下是使用Eigen3的代码示例文章来源:https://www.toymoban.com/news/detail-451321.html
#include "Eigen/Core"
#include "Eigen/Geometry"
#include <cmath>
// 陀螺仪测量数据
float gyro[3];
// 初始四元数
Eigen::Quaternionf quaternion = Eigen::Quaternionf(1.0f, 0.0f, 0.0f, 0.0f);
while (1) {
// 读取陀螺仪数据,单位mdegree/s
read_data(gyro);
// 转为向量,单位degree/s
Eigen::Vector3f gyroscope = Eigen::Vector3f(gyro[0] / 1000.0f, gyro[1] / 1000.0f, gyro[2] / 1000.0f);
// 时间间隔dt,单位s
float dt = get_dt() / 1000.0f;
// 角速度向量,单位rad/s
Eigen::Vector3f omega = gyroscope * M_PI / 180.0f * dt;
// 转换到导航坐标系
omega = quaternion.toRotationMatrix() * omega;
// 旋转角度
float theta = omega.norm();
// 旋转对应的四元数
omega = omega.normalized() * std::sin(theta / 2.0f);
Eigen::Quaternionf q = Eigen::Quaternionf(std::cos(theta / 2.0f), omega.x(), omega.y(), omega.z());
// 应用旋转
quaternion = (q * quaternion).normalized();
}
陀螺仪可以解算出载体的俯仰角、滚转角和偏航角,但是因为积分的原因,误差会进行积累,时间一长姿态就会不准确。文章来源地址https://www.toymoban.com/news/detail-451321.html
到了这里,关于三轴陀螺仪解算姿态(四元数)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!