本节介绍旋转变压器的结构、原理、原副边补偿方法
本节介绍线性旋变、多极旋变
本节介绍旋变在测量角度、改变相位、位置解算等方面的应用
概述
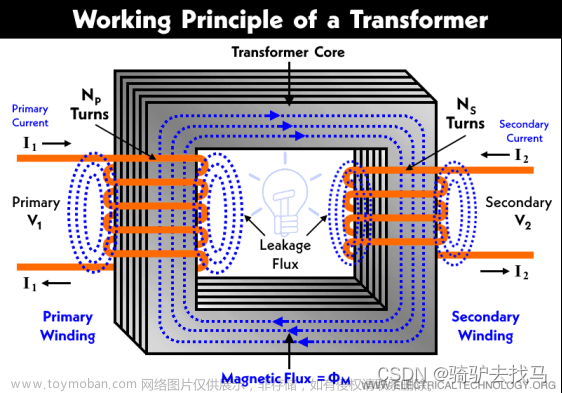
旋转变压器,简称旋变,用来测量旋转物体的角位移。其本质是一个变压器,通过电磁耦合得到感应电压。原边和副边分别处于定子和转子上,其错开的角度不同,电磁耦合程度不同,副边所得电压幅值就不同,借此测量角度。
根据输出与输入的函数关系,可以分为:
- 正余弦旋变:其两个输出电压分别与转角呈正弦和余弦关系。
- 线性旋变:在一定范围内,其输出电压与转角呈线性关系。
- 比例式旋变:同正余弦旋变,但转子可锁紧在任意位置,以达到比例环节的作用。
根据磁极对数可以分为:两极旋变和多极旋变。根据结构形式可分为:接触式旋变和非接触式旋变、一体式和分体式旋变。
主要用途分两类:
- 解算用,用于座标运算 和三角运算,包括正余弦旋变、线性旋变
- 传输用,将角位移信息从一处传递到另一处,包括旋变发送机、旋变变压器、旋变差动发送机
旋转变压器分有刷式和无刷式,其原理相同。有刷式通过电刷和滑环将输出信号引出,无刷式通过附加变压器将输出信号引出。
旋转变压器的电路符号:
结构
以两极有刷旋变为例:
结构与绕线式异步电动机相似。定、转子铁心槽中分别嵌放两个轴线相互垂直的分布式绕组(绘图为了简便,等效为集中式绕组处理)
工作原理
空载运行
空载运行时除
S
1
S
3
S_1S_3
S1S3接励磁电压,其他绕组均开路。

两个绕组中感应电势的有效值:
E
R
13
=
E
R
cos
θ
E
R
24
=
E
R
sin
θ
E_{R13}=E_R\cos \theta \\E_{R24}=E_R\sin \theta
ER13=ERcosθER24=ERsinθ,称
R
1
R
3
R_1R_3
R1R3为余弦绕组,
R
2
R
4
R_2R_4
R2R4为正弦绕组
负载运行

带负载后旋变输出电压与正余弦函数之间出现误差。转角45度时误差最大。负载电流越大,误差越大。称这种输出特性偏离理想正余弦规律的现象为畸变。
产生畸变的原因:带负载后副边有了电流,进而产生磁场,感应出感应电势,影响输出。

想要补偿负载时输出电压的畸变,则应用没有利用的两个绕组:
副边补偿
首先介绍一下交轴和直轴。一般以与励磁绕组磁场轴线平行的轴为直轴,与直轴相正交的轴为交轴。
副边补偿的原理是,将副边两个绕组都接负载,使其产生的交轴磁势相互抵消。
交轴磁势完全抵消的条件是:
Z
L
′
=
Z
L
Z_L'=Z_L
ZL′=ZL
直轴:
直轴磁势与转角无关,可以通过增大励磁电流进行补偿。
副边对称补偿要求 Z L ′ = Z L Z_L'=Z_L ZL′=ZL,对于负载阻抗变化的情况,很难实现完全补偿
原边补偿
原边补偿的原理是将原边补偿绕组闭合,利用其中感应电流产生的磁势抵消转子产生的交轴磁势。

可以证明,原边对称补偿的条件是:
Z
s
=
Z
f
Z_s=Z_f
Zs=Zf,
Z
f
Z_f
Zf为励磁电源内阻。
由于电源内阻很小,所以可以近似
Z
s
=
0
Z_s=0
Zs=0,即把补偿绕组直接短路
使用原边补偿,则负载阻抗的改变不影响补偿程度。且不需要测量负载阻抗,直接短接就好,实现简单。
但缺点是 S 1 S 3 S_1S_3 S1S3输入电流与转角有关,因此输入功率与输入阻抗都随转角变化。且由于负载变化时补偿磁场不变,因此不能完全消除畸变。
一般为了更好的补偿效果,会同时采用副边补偿和原边补偿
线性旋转变压器
对于正余弦规律:
转角小时是线性元件。但精度有限、转角范围有限。
在结构不变的情况下扩大线性区:

使用时仍需注意转角范围限制。
旋变的主要参数
- 额定电压。励磁绕组应加的电压,有12、16、26、36、60、90、110、115、220V等多种
- 额定频率。励磁电压的频率,从50~ 20kHz都有。50Hz公频使用方便但性能较差,400Hz性能较好但成本较高
- 变比。就是变压器的变比那个意思,不过在旋转变压器里,要求在规定的励磁绕组上加额定频率的额定电压,非励磁绕组与励磁绕组轴线一致,处于零位,开路输出,此时的输入输出电压之比为变比。一般有0.15、0.56、0.65、0.78、1.0和2.0等。
- 输出相位移。输出电压与输入电压的相位差。越小越好,一般在3~12度电角左右。
- 开路输入阻抗。输出绕组开路,从励磁绕组看见去的等效阻抗。标准开路阻抗有200、400、600、1000、2000、3000、4000、6000、10000等
- 旋变的误差
- 函数误差:在旋变励磁绕组上加额定电压,补偿绕组短路,在不同转角下,两个输出绕组实际输出特性和理想输出特性间的最大差值 与理论最大输出值之比,一般在0.02~ 0.1%。函数误差直接影响作为解算元件的解算精度
δ s ( % ) = ( U α U α = 90 ° − sin α ) × 100 % \delta_s(\%)=(\displaystyle \frac{U_\alpha}{U_{\alpha=90\degree}}-\sin \alpha)\times100 \% δs(%)=(Uα=90°Uα−sinα)×100% - 零位误差:在旋变励磁绕组上加额定电压,补偿绕组短路,两个输出绕组的实际零位和理论零位之差,一般在2~ 10‘(角分)。零位误差直接影响计算和数据传输系统的精度
- 线性误差:旋变在一定的转角范围(一般为±60
°
\degree
°),采用线性旋变方式接线,转子的实际转角与理想特性对应转角的最大差值,用角分表示
%{\delta_1(\%)=\displaystyle \frac{U_\alpha'-U_\alpha}{U_{\alpha=60\degree}}\times100\%} - 电气误差:在不同转角 α \alpha α处,由输出电压所求理论转角与实际转角之差,用角分表示。是评价数据传输用旋变性能的主要指标
- 函数误差:在旋变励磁绕组上加额定电压,补偿绕组短路,在不同转角下,两个输出绕组实际输出特性和理想输出特性间的最大差值 与理论最大输出值之比,一般在0.02~ 0.1%。函数误差直接影响作为解算元件的解算精度
- 误差产生的原因:绕组谐波、齿槽、磁路饱和、 材料、制造工艺、交轴磁场干扰等。
改进措施:提高加工工艺、原副边补偿、采用正弦绕组、短距绕组、改为斜槽
旋转变压器的应用
角度测量元件
- 小角度内是线性测量元件。
- 大角度范围时,使用旋转变压器转换器模块,将输出信号转换成数字量输出。
- 测量两个轴的转角差。

在这里需要注意两个问题:
1)发送机处,转子是一次侧,定子是二次侧,与之前相反
2)直轴位置,随励磁绕组不同而不同
感应移相器

转子开路输出
按照其并联关系列方程组:
输出电压的相位滞后输入角度
α
45
°
\alpha\ 45\degree
α 45°
以上是空载情况,在带载情况下,还需满足:
当高频域
ω
\omega
ω很大时,
R
2
r
<
<
X
2
r
R_{2r}<<X_{2r}
R2r<<X2r,为了保证精度,往往还在正弦绕组中串连一个补偿电阻
R
c
p
R_{cp}
Rcp
其他应用
- 解算元件:定子 S 1 S 3 S_1S_3 S1S3输入 U 1 U_1 U1,原边补偿。测量转子正弦绕组 R 2 R 4 R_2R_4 R2R4电压 U 2 U_2 U2,当两个电压相等时,转子偏转角度 θ = arcsin U 2 U 1 \theta=\arcsin\frac{U_2}{U_1} θ=arcsinU1U2
- 矢量运算:旋变的变比为1
- 矢量分解:定子 S 1 S 3 S_1S_3 S1S3输入 U U U,原边补偿。正弦绕组输出其直轴分量,余弦绕组输出交轴分量
- 矢量合成:定子 S 1 S 3 S_1S_3 S1S3输入 U y U_y Uy, S 2 S 4 S_2S_4 S2S4输入 U x U_x Ux。当转子余弦绕组输出为0时,正弦绕组输出其矢量和的幅值,转子转角输出其矢量和的相角
- 加减乘除:两个量以转角形式给出,用两台线性旋变,将两个输出串连,得到正比于两数和差的输出
使用注意事项
- 旋变应尽量在接近空载的状态下工作,应使负载阻抗远大于旋变输出阻抗
- 使用时首先要准确调准零位
- 只用一相励磁绕组时,需要进行原边补偿。给另一相绕组短路或接与励磁电源内阻相同的阻抗
- 同时使用两相励磁绕组,则只能采用副边补偿,故应使两相输出绕组的负载阻抗尽可能相等
- 分体式旋变安装时要保证定、转子同心
- 励磁电压频率要与最大转速匹配
- 旋变结构尺寸、转子转动惯量要匹配机械系统要求
- 注意不同的励磁方式需要不同的解调电路
- 注意环境湿度、震动等
多极旋转变压器
旋转变压器最主要的缺点就是精度不高,而多极旋变就是为了提高测量精度而设计的。
其工作原理与两极旋变完全相同,仅是磁场极对数增加,使得输出电压的有效值随转角变化的周期不同
对于p对极的多极旋变:
U
s
(
p
)
=
U
m
(
p
)
sin
p
θ
U
c
(
p
)
=
U
m
(
p
)
cos
p
θ
U_{s(p)}=U_{m(p)}\sin{p\theta}\\U_{c(p)}=U_{m(p)}\cos{p\theta}
Us(p)=Um(p)sinpθUc(p)=Um(p)cospθ
在0~360度范围内,多极旋变的输出是周期性函数,因此仅从输出电压不能唯一确定转角。
在实际系统中把两极旋变和多极旋变配合使用,组成双通道测角系统,使用两极旋变粗测,多极旋变精测
如图:测量
θ
1
θ
2
\theta_1 \theta_2
θ1θ2角度差,并驱动电机使其趋于相等
粗精转换电路,当失调角小的时候输出精测通道,失调角度大的时候输出粗测通道。文章来源:https://www.toymoban.com/news/detail-451357.html
 文章来源地址https://www.toymoban.com/news/detail-451357.html
文章来源地址https://www.toymoban.com/news/detail-451357.html
到了这里,关于「自控元件及线路」9 旋转变压器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!