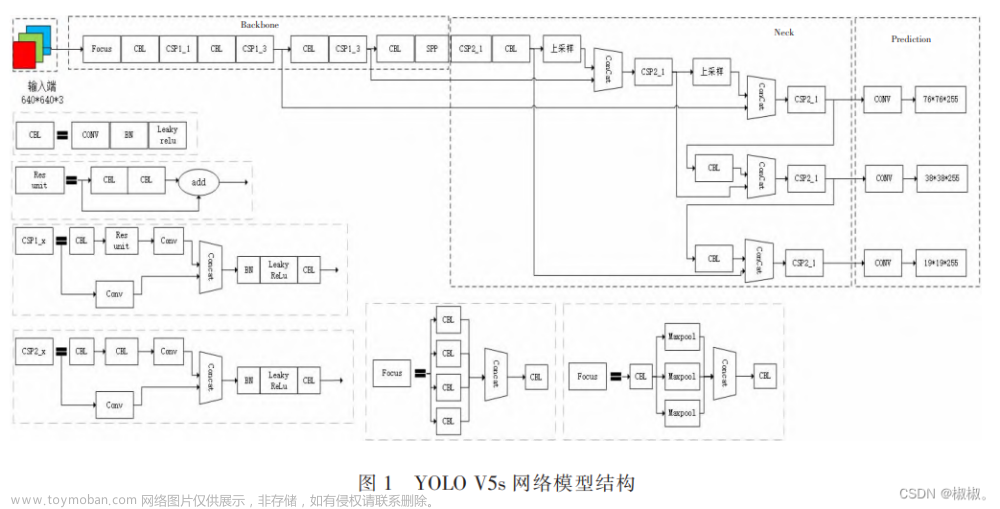
YOLO v5 引入解耦头部
前言
在 YOLO x中,使用了解耦头部的方法,从而加快网络收敛速度和提高精度,因此解耦头被广泛应用于目标检测算法任务中。因此也想在YOLO v5的检测头部引入了解耦头部的方法,从而来提高检测精度和加快网络收敛,但这里与 YOLO x 解耦头部使用的检测方法稍微不同,在YOLO v5中引入的解耦头部依旧还是基于 anchor 检测的方法。文章来源:https://www.toymoban.com/news/detail-451785.html
一、解耦头部示意图
在YOLO x中,使用了解耦头部的方法,具体论文请参考:https://arxiv.org/pdf/2107.08430.pdf
于是按照文章来源地址https://www.toymoban.com/news/detail-451785.html
到了这里,关于YOLO v5 引入解耦头部的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!