提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
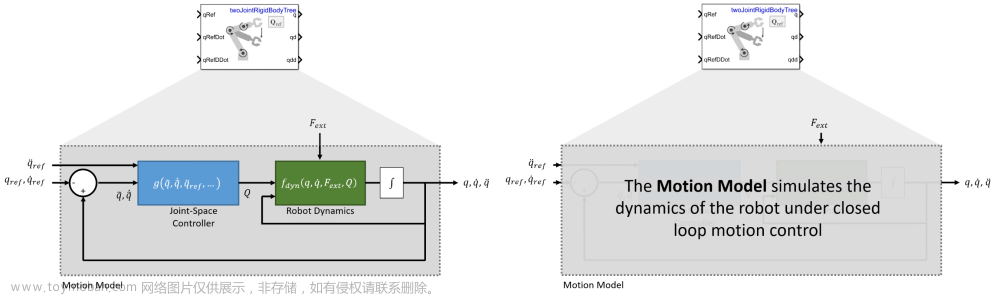
关节空间动力学控制
目前的工业机器人几乎完全依赖于关节位置控制的概念。它们建立在PID控制器的基础上,独立调节机器人每个关节的位置或速度。这样的控制器补偿了调节器和整个机器人中的干扰,并在理想情况下导致理想运动的完美跟踪。只有通过额外感知关节扭矩(例如,通过称重传感器测量扭矩或通过从电机电流和执行器模型中估计扭矩),才有可能集成基于模型的负载补偿。
关节阻抗调节
对于力控制器,关节位置
k
p
{{k}_{p}}
kp和速度
k
d
{{k}_{d}}
kd的关节反馈增益对应于关节刚度和阻尼,期望的作动器转矩可计算为
其中
q
∗
{{q}^{*}}
q∗和
q
˙
∗
{{\dot{q}}^{*}}
q˙∗分别表示期望的关节位置和速度。将该控制律应用于机械臂时,得到稳态跟踪误差:
重力补偿
为了补偿稳态偏置和调节关节阻抗,一种常用的方法是选择期望的执行器转矩为
其中,
g
^
(
q
)
\hat{g}(q)
g^(q)表示估计的重力作用。不幸的是,由于每个关节处的惯量随机器人的构型而变化,因此必须为工作空间中的某个平均构型选择PD增益。当动态效果变得显著时,这会降低(重力补偿的)性能。稳态误差仍然存在,因为模型从来都不是完全准确的。文章来源:https://www.toymoban.com/news/detail-453137.html
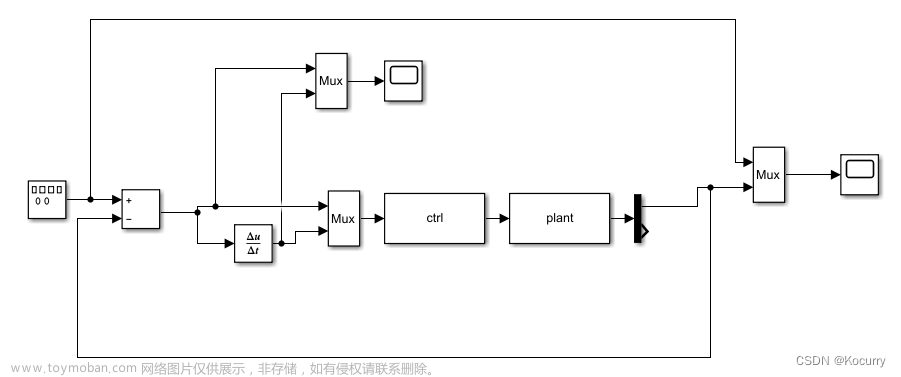
逆动力学控制
克服这些缺点的一个简单方法是实现逆动力学控制方法。为实现动态解耦和运动控制,选取关节转矩为:
其中
M
^
(
q
)
\hat{M}(q)
M^(q),
b
^
(
q
,
q
˙
)
\hat{b}(q,\dot{q})
b^(q,q˙)和
g
^
(
q
)
\hat{g}(q)
g^(q)表示
M
(
q
)
M(q)
M(q),
b
(
q
,
q
˙
)
b(q,\dot{q})
b(q,q˙)和
g
(
q
)
g(q)
g(q)的估计值。
在一个完美模型的情况下,系统(3.1)与控制(3.75)的闭环动力学结果为
换句话说,这种方法可以直接塑造每个关节的解耦动力学。与(3.72)中介绍的阻抗定律类似,一种常见的方法是根据选择所需的加速度
这对应于一个线性质量-弹簧-阻尼器系统。
作为一个巨大的好处,反馈增益kp和kd的调谐和选择变得直观清晰,因为它们表示解耦点质量振荡器的物理参数。
因此,系统的特征频率和无量纲阻尼值由式给出
当D = 1时达到临界阻尼,当D > 1时达到过临界阻尼,当D < 1时达到非临界阻尼。
控制器的可塑性(compliance)可以通过改变
k
p
{{k}_{p}}
kp来调节文章来源地址https://www.toymoban.com/news/detail-453137.html
到了这里,关于Robot Dynamics Lecture Notes学习笔记之关节空间动力学控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!