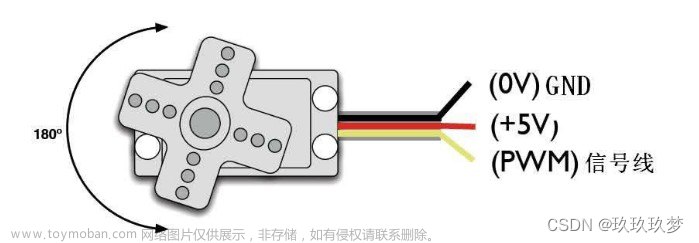
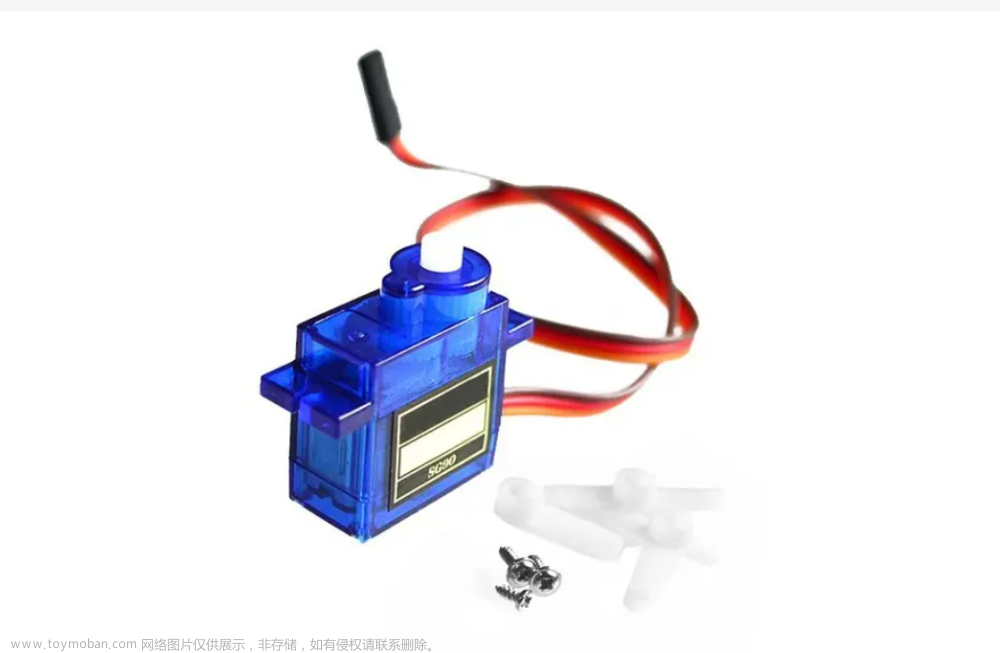
舵机组成
舵机是一种常见的伺服电机,主要用来控制角度的变化。常见的sg90舵机组成结构如下:

模拟舵机与数字舵机的区别
sg90是模拟舵机,除了模拟舵机外,还有数字舵机,他们的控制区别如下文章来源:https://www.toymoban.com/news/detail-453462.html

模拟舵机和数字舵机的机械结构一样;硬件方面数字舵机多了一块芯片,充当一个管家的作用;控制方面只需要接受一个50HZ的PWM波即可稳定角度(多发几次会稳妥一点),而模拟舵机要不断接收50HZ的PWM波。文章来源地址https://www.toymoban.com/news/detail-453462.html
控制代码(模拟和数字可通用)
arduino控制代码(需要自己修改引脚号)
#include <Servo.h>
Servo myservo1; // create servo object to control a servo
Servo myservo2;
// twelve servo objects can be created on most b到了这里,关于舵机,模拟舵机,数字舵机(arduino,stm32f103代码开源)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!