说明
目标的RCS是目标很重要的一个特征。从雷达方程来看,目标的RCS值直接影响其所反射的电磁波能量,并进而决定雷达所能探测的该目标的最远距离。从后端的数据处理来看,如果我们可以获取目标准确的RCS值,可以辅助我们做目标识别与分类。本博文探讨基于毫米波雷达的目标RCS估计问题,通过模型理解与仿真、设计对比实验等方法尽可能详尽地阐述目标RCS与毫米波雷达测量之间的联系。本博文会随着经验的积累和理解的加深不定期丰富和更新。
Blog
20230327 博文第一次写作
文章架构
目录
说明
文章架构
一、关于RCS的定义及其影响因素
二、不同目标的RCS说明
三、RCS的测量方法
四、基于Ti级联板对角反RCS的测量试验
4.1 实验目的
4.2 实验原理
4.3 实验场景与方法
4.4 数据处理流程
4.5 实验结果与结论
五、总结
六、参考资料
七、代码和数据
一、关于RCS的定义及其影响因素
目标散射回波信号的强弱与目标的散射特性有关,在雷达方程中通常采用目标的等效散射截面积(Radar cross section, RCS)来衡量目标的散射特性。影响RCS的主要因素有目标的结构和表面介质、雷达频率(波长)、极化方式、雷达视线(目标姿态角/电磁波的入射方向)、目标与雷达之间的位置关系等。
我们用目标后向散射能量强度来定义目标的RCS。点目标RCS的定义为:
 (1.1)
(1.1)
式中,P为目标散射的总功率,S为目标受到照射的功率密度。[注意这是一个定义式,并不是决定式],对应上式,雷达接收位置处单位立体角内的散射功率为:
 (1.2)
(1.2)
也即:
 (1.3)
(1.3)
上面的公式可以用这句话来说明:在远场的条件(或者说目标可以当成一个点目标的条件)下,目标RCS等于4*pi乘以目标散射波的辐射功率密度与入射波的功率密度之比。
从RCS的定义我们就能很好地理解上面的那句话:【影响RCS的主要因素有目标的结构和表面介质、雷达频率(波长)、极化方式和雷达视线(目标姿态角/电磁波的入射方向)、目标与雷达之间的位置关系等】,因为这些因素都会影响到目标的反射能量,进而影响目标的RCS。
这里贴几张图感受一下RCS与入射角、频率、极化的关系。首先定义目标模型(目标为点目标):

图1.1 目标模型
在上述模型之下:

图1.2 RCS与视角的关系

图1.3 RCS与频率的关系

图1.4 RCS与极化方向的关系
这几个图我这边也暂时没有相关的仿真代码,目的在于给大家感受一下这些影响因素对雷达RCS的影响。
【关于几个概念的理解】
前文有提及到点目标、远场,后面的内容我还会提及包括光学区、谐振区、瑞利区等概念。在进入到后续内容之前,这里先对这几个名词做出解释:
1、关于远场:
远场是站在目标的角度来评价来波是否为平面波,当目标与雷达的距离R满足:
 (1.4)
(1.4)
式中D为目标的截面(或者把目标当成一个天线,该值是天线的直径大小,事实上我们去做天线测试时,来界定远场与否此时的D便是天线的直径大小)。λ为所用电磁波的波长。当目标与雷达之间的距离满足上述关系时,认为满足远场条件,此时认为目标接收的来波为平面波(电磁波平行照射)
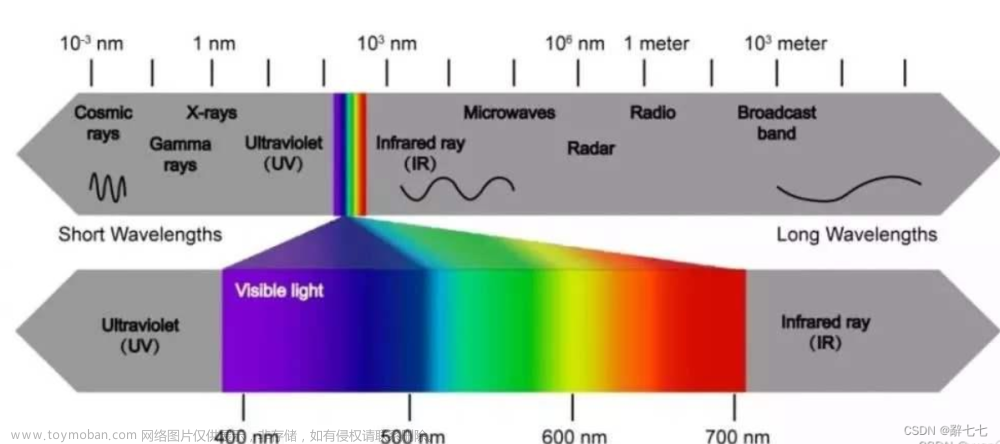
2、关于光学区、谐振区、瑞利区:
这几个区是基于目标尺寸与电磁波波长的关系来区分的,用以评价电磁波作用于目标的情况:当处在不同的区时,电磁波在目标物上的传播是有差别的,这也便解释了前面提及的目标RCS值也与波长有关。按照目标的尺寸和波长的关系:波长远小于目标尺寸时,我们认为处于光学区,波长远大于目标尺寸时,处于瑞利区,中间的情况处于谐振区。

图1.5 球体的RCS随波长的变化关系
其纵坐标为RCS,用球体最大圆的面积归一化了: 。可以看到,当波长等于球体最大圆的周长时RCS达到峰值(近似等于最大圆的面积)。具体到关于车载毫米波雷达的应用,因为车规对车载毫米波雷达的要求是76-79GHz,波长mm左右,所以对于车载毫米波雷达而言,绝大多数目标是处在光学区的。
。可以看到,当波长等于球体最大圆的周长时RCS达到峰值(近似等于最大圆的面积)。具体到关于车载毫米波雷达的应用,因为车规对车载毫米波雷达的要求是76-79GHz,波长mm左右,所以对于车载毫米波雷达而言,绝大多数目标是处在光学区的。
3、关于点目标:
点目标是我们对目标的一种理想化/简单化建模。当目标可以被看成是点目标时对它的分析可以极大简化,我们上面对RCS的定义也是针对目标是点目标的情况。那么我们如何评判一个目标是否是点目标?这个与三维空间分辨单元这个概念有关,我们定义三维空间分辨单元为:
 (1.5)
(1.5)
Ω为雷达波束的立体角,以半功率点对应的波束宽度来确定,假设其3dB波束宽度为α,则对应的立体角是:
 (1.6)
(1.6)
R是目标与雷达之间的间距,t是单脉冲宽度,t对应的距离分辨率:Rres = c*t/2,(但是我们以chirp形式发射的信号,距离分辨率的计算应该基于公式:Rres = c/(2*B) 来计算!)。比如某脉冲雷达的脉冲宽度为t = 50ns,对应的距离分辨率为7.5m,天线的3dB波束宽度为1.5°,则该雷达的分辨单元的体积V与距离的关系如下图所示:

图1.6 雷达三维空间分辨单元与目标和雷达间距的变化关系
我们用这个所谓的三维分辨单元来评价目标是否为点目标:如果一个目标可以被全部包含在体积V中,便认为该目标属于点目标(实际上只有明显地小于体积V的目标才能真正算作是点目标,所以像飞机、卫星、导弹等这样一些雷达目标,当用低分辨率雷达观测时可以算是点目标,但是对于高分辨率雷达而言,它们可能就不算是点目标了)。不属于点目标的目标有两类:一类是目标尺寸大于分辨单元且形状不规则;一类是分布目标,它是统计上均匀的散射体的集合。具体到车载毫米波雷达,如果去评价目标是否为点目标,我们可以用上式去计算和分析,不过此时的c*t/2应该变成c/(2*B),下图中距离分辨率设置为1m。

图1.7 车载毫米波雷达三维空间分辨单元与目标和雷达间距的变化关系
一个有益的结论是:处于远场的目标不一定是点目标,但是如果目标是点目标它一般是处于远场。
二、不同目标的RCS说明
1、简单形状目标的RCS
球体、圆板、锥体等它们的RCS是可以计算出来的!在所有简单目标中,球体RCS的计算是最为重要的,球具有最简单的外形,且RCS与视角无关,我们常用金属球作为衡量截面积的标准,用于校准数据和实验测定,以下给出几种典型目标的RCS计算公式。
表2.1 几种典型目标的RCS数值计算公式

2、复杂目标的RCS
比较复杂,暂时不做讨论。这里参考网络资料,给出在车载毫米波雷达应用场景中一些典型目标的RCS值(数据来源参考资料2、3):
人:-8至-3dBsm ;自行车:能到10dBsm ;小车:19—25dBsm
对于人,与人穿的衣服都有关系,对于车辆,只有当其距离雷达的距离足够大,雷达的波束对于车辆的覆盖足够大,其RCS值才会更为稳定。
我在大陆548的一个手册中又看到如下分类:
卡车:15dBsm ;小车:10dBsm ;摩托车:5dBsm ;自行车:-5dBsm ;人:-7dBsm
三、RCS的测量方法
测量方法主要分为:缩比模型测量、全尺寸目标静态测量、目标动态测量三种方式。实验室中通常采用缩比模型测量,这里讨论这种方法:
A、关于缩比模型:
将雷达波长、目标各部分的尺寸和材料参数等按照电磁模型相似比例关系缩小。其基本理论依据是全尺寸目标和目标缩比模型之间满足特定的电磁关系,比例为1:s的缩比模型,该缩小后模型的RCS’与真实尺寸时的目标RCS有关系:
RCS = RCS’+ 10*log10(S^2) (3.1)
做测试时,测试频率f’也应该对应为全尺寸目标测量频率f的s倍。
B、关于具体测量:
一般采用相对定标法:利用雷达所接收到的从目标反射回来的回波功率与目标RCS成正比的特性来完成对目标RCS的测量的方法。在测量中,需要使用一个RCS已知的目标作为比较的标准,称之为定标体(常用的定标体有:金属导体球、金属平板以及二面角反射器等)。
【关于为什么要使用所谓的定标体?我知道了能量不就知道了RCS了吗?】
雷达所接收到的目标回波能量与RCS的关系(从雷达方程来看,该雷达方程参考我另一篇博文:毫米波雷达的系统设计细节(1) - 从雷达方程到雷达威力图_墨@#≯的博客-CSDN博客 给出的公式):
 (3.2)
(3.2)
如果我们想要通过接收到的Pr值,来计算RCS也是可以的?:
 (3.3)
(3.3)
实际应用时,Pr应该也要考虑接收链路上硬件带来的增益Ga!包括Gs和Ga在计算目标实际的Pr时应该是用幅值先除以增益之后再取平方。
可是如果我们有一个标准反射体做参考的话,我们可以将上述公式中间的那些变量全部变成一个常量(我们在做实验时可以保证其它的变量都是一样的)。
对于待测目标:
 (3.4)
(3.4)
对于定标体:
 (3.5)
(3.5)
于是得到:
 (3.6)
(3.6)
已知RCS2、知道实验前后的P1和P2便可以得到RCS1的值。注意这里是功率,如果用幅度来算应该是要用幅度的平方。
四、基于Ti级联板对角反RCS的测量试验
以下基于Ti级联板,综合前述第三章中的测量方法,对角反做测量实验进行验证这部分的内容也可以参考我随附的数据和代码链接中的实验报告文档。
4.1 实验目的
通过实验采集数据来求解待测目标的RCS值。验证使用雷达方程以及基于相对定标法测量目标RCS的正确性。
4.2 实验原理
预设了两种求解方法:
1、直接基于雷达方程的公式求解。
在我们已知雷达收发参数的前提下,理论上我们可以通过雷达方程和实验结果来得到目标的RCS值(当然,是有偏差的,但是如果偏差在可接受的范围之内那我们还是认为这是一种测量目标RCS的方法)。由雷达方程(关于具体的可以参考我的另外一篇博文: 毫米波雷达的系统设计细节(1) - 从雷达方程到雷达威力图_墨@#≯的博客-CSDN博客):
 (4.1)
(4.1)
式中,R为目标与雷达之间的距离,L为系统损耗(计算时暂时取3dB),Pt为发射功率(Ti级联板AWR2243的芯片手册上该值为13dBm),Gt与Gr取10dBi,λ取77GHz对应的波长0.0039m,Gs为信号的处理增益,该值在本次实测中为256*64对应距离维采样点数和速度维采样点数。Pr为接收信号目标的功率值,这里取为进行二维压缩之后目标所在位置的幅度的平方,不过在求解幅度时对齐进行了去增益的处理:Val/Ga/Gs。Ga为接收链路的硬件端的增益(该值在Ti的芯片中可以设置,本次实验设置为48dB,Gs为前述信号的处理增益,如果这里将信号处理的增益去除,那么在分母端Gs将不再需要再除一次)。
2、通过前面中给出的相对定标法求解。
实验中我使用了两个角反,一个角反的RCS值为10dBsm(作为定标体),另一个小角反的RCS值认为未知,并通过相对定标法来得到该RCS的值。

图4.1 左边角反为定标体,右边为待测目标
该方法基于公式:
 (4.2)
(4.2)
该公式的来源以及相对定标法的原理我在前文中已经给出。这里P值的选取与前面方法一中Pr求解一样。
4.3 实验场景与方法
实验场景如下图所示:

图4.2 实验场景图1

图4.3 实验场景图2
目标位于雷达正前方4m左右的位置,我们做三次测量:
第一次实验杆子上不放任何东西,本次测量的结果将作为环境值。
第二次实验杆子上放小角反。
第三次实验杆子上放定标体(大角反)。
这三次实验除目标有区别外,其它都是一样的:包括实验环境以及雷达的收发参数。
4.4 数据处理流程
数据处理的目的在于从距离多普勒图中找到目标的位置并得到该位置处的能量值。这是很容易实现的:基于已知的雷达与目标的距离R和从雷达的收发参数设计得到的距离分辨率Rres,我们可以得到目标距离维的索引Ridx = R/Rres,不过考虑到测量的R可能不准确,所以这里对距离索引的确定通过在设置的R对应索引的±0.5m的搜索范围内找到能量最大值并以之作为目标的能量值并得到该能量值对应的索引值。对于没有放置角反的实验,我是想用以减去环境的影响,所以对于前面求得的能量值,还需要减去没有放置角反时对应索引位置的能量值。
具体的处理流程和代码参考随附的代码文件。
4.5 实验结果与结论
A、中间结果:
%idx_待测角反 = 77; Val_待测角反 = 5.1393e6;
%idx_定标体 = 77; Val_定标体 = 1.7632e7;
%在速度索引为77时的环境结果(无目标只有杆子):Val = 1.3282e6
此外,还测量了两个角反的直角边长:
%a_定标体 = 77.72e-3; %m
%a_小角反 = 37.54e-3;
关于角反的直角边长与其RCS有计算公式:
%RCS = 4*pi*a^4/(3*λ^2) (m^2)
%RCS = 10*log10(RCS) (dBsm)
B、实验结果与分析
1、从边长到RCS来看,可以得到两个角反的RCS值分别约为:
RCS_定标体 = 10.0293dBsm
RCS_小角反 = -2.622dBsm
这边从商家购入的这个大角反一个10dBsm的标准角反,说明公式是没问题的。
2、基于相对定标法得到的小角反的RCS值为:-2.6248dBsm,(具体的见代码),这个值和前述基于公式的计算结果是吻合良好的,也即:验证了相对定标法的可行性和正确性。
3、基于雷达方程我得到的两个目标(作为定标体的10dBsm的大角反和小角反)的RCS值分别为:67.4276dBsm以及54.8028dBsm,(具体的见代码),这两的差值为12.6248dB是对的?但是各自的实际值差很远!原因我暂时还没有找到.. 关于这种方法下的具体计算,可以看随附的代码,应该没有数值计算或者单位换算上的错误。
五、总结
本博文主要探讨目标RCS的问题,给出了关于目标RCS的定义,分析了其影响因素,并理清楚了几个雷达领域常见的专有名词及其意义。随后给出了目标RCS的测量方法,并设计实验,分别从雷达方程和相对定标两种途径求解待测目标的RCS值,实验结果也验证相对定标法,基于雷达方程求解的方法有一些问题,欢迎读者在评论区讨论,我后续如果理清楚了会更新该部分的内容。
六、参考资料
1、《现代雷达系统分析与设计》
2、Kamel E B, Peden A, Pajusco P. RCS modeling and measurements for automotive radar applications in the W band[C]//2017 11th European Conference on Antennas and Propagation (EUCAP). IEEE, 2017: 2445-2449.
3、Yamada N, Tanaka Y, Nishikawa K. Radar cross section for pedestrian in 76GHz band[C]//2005 European Microwave Conference. IEEE, 2005, 2: 4 pp.-1018.
七、代码和数据
本博文中涉及的图的仿真代码,以及后面的实验方案、实验数据、数据解析和分析的代码可参考:文章来源:https://www.toymoban.com/news/detail-453741.html
毫米波雷达的系统设计细节(2)-关于目标RCS的问题博文相对应的代码和数据资源-CSDN文库文章来源地址https://www.toymoban.com/news/detail-453741.html
到了这里,关于毫米波雷达的系统设计细节(2) - 关于目标RCS的问题的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!