单片机:stm32f103
传感器:普通红外(我用了4个)
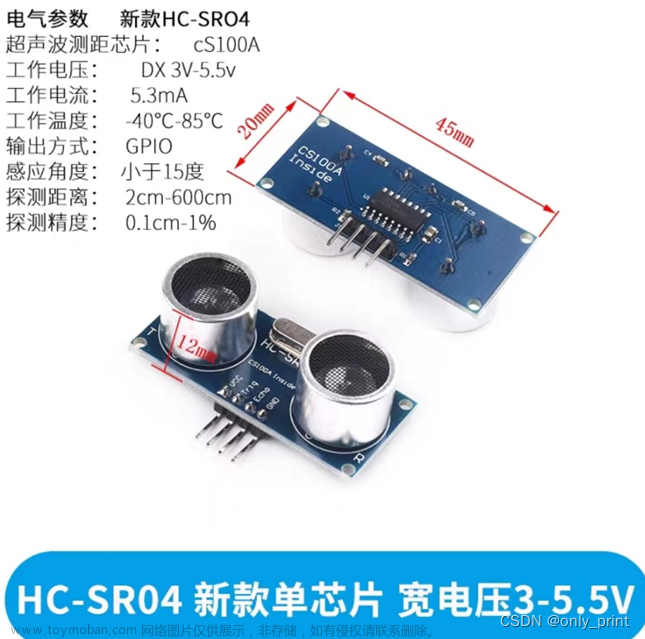
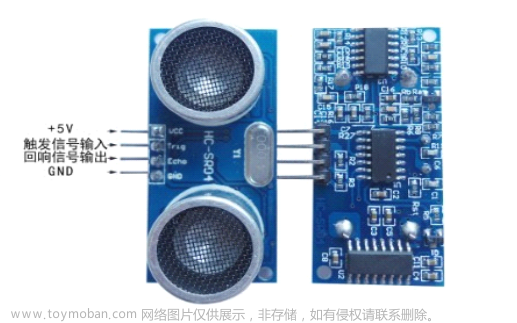
超声波:HC-SR04
舵机:SG90
目标:可以循黑线(十字直行)、并避障
如果硬件配置和我一样以下代码可直接使用,用我配置的引脚即可。
亲测好用。
复制代码的同时请点个赞,多谢!
一、超声波代码
.c
#include "Ultrasonic.h"
#include "stm32f10x.h"
#include "delay.h"
#include "usart.h"
/*记录定时器溢出次数*/
uint overcount=0;
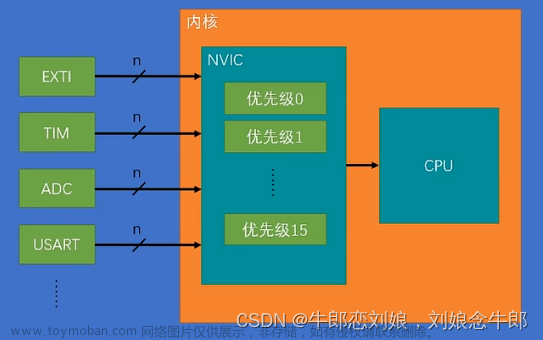
/*设置中断优先级*/
void NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;//定义中断初始化结构体
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//选择中断分组
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;//设置 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0;//设置子优先级
NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;//设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);//中断初始化
}
/*初始化模块的GPIO以及初始化定时器TIM2*/
void Ultrasonic_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//中断初始化
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//定义定时器初始化结构体
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE);//开GPIO 外设时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//开Timer外设时钟
/*TRIG触发信号*/
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//配置输出口速率
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//配置输出模式为推挽
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4;//设置为引脚PA.4
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA.4
/*ECOH回响信号*/
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//配置输入模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;//设置引脚号PA.3
GPIO_Init(GPIOA, & GPIO_InitStructure);//初始化PA.3
/*定时器TIM2初始化*/
TIM_DeInit(TIM2);
TIM_TimeBaseInitStructure.TIM_Period=999;//定时周期为1000
TIM_TimeBaseInitStructure.TIM_Prescaler=71; //分频系数72
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;//不分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//计 数器向上计数模式
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//初始化Timer2
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//开启更新中断
NVIC_Config();//初始化中断分组配置
TIM_Cmd(TIM2,DISABLE);//关闭定时器使能
}
float Senor_Using(void)
{
float length=0,sum=0;
u16 tim;
uint i=0;
/*测5次数据计算一次平均值*/
while(i!=3)
{
PAout(4)=1; //拉高信号,作为触发信号
delay_us(20); //高电平信号超过10us
PAout(4)=0;
/*等待回响信号*/
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_3)==RESET);
TIM_Cmd(TIM2,ENABLE);//回响信号到来,开启定时器计数
i+=1; //每收到一次回响信号+1,收到5次就计算均值
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_3)==SET);//回响信号消失
TIM_Cmd(TIM2,DISABLE);//关闭定时器
tim=TIM_GetCounter(TIM2);//获取计TIM2数寄存器中的计数值,一边计算回响信号时间
length=(tim+overcount*1000)/58.0;//通过回响信号计算距离
sum=length+sum;
TIM2->CNT=0; //将TIM2计数寄存器的计数值清零
overcount=0; //中断溢出次数清零
delay_ms(10);
}
length=sum/3;
return length;//距离作为函数返回值
}
void TIM2_IRQHandler(void) //中断,当回响信号很长是,计数值溢出后重复计数,用中断来保存溢出次数
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除中断标志
overcount++;
}
}.h
#ifndef __Ultrasonic_H
#define __Ultrasonic_H
#include "stm32f10x.h"
#include "delay.h"
#include "sys.h"
#define uint unsigned int
#define TRIG_Send PAout(4)//定义触发信号TRIG引脚
#define ECHO_Receive PAin(3) //定义回响信号ECHO引脚
void Ultrasonic_Init(void); //超声波模块相关配置初始化
float Senor_Using(void); //测距函数,返回值即为距离
void NVIC_Config(void); //中断配置
#endif二、舵机控制
.c
#include "SteeringMotor.h"
#include "delay.h"
//初始化PA2引脚
void Steer_pwm_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量,用来初始化GPIO
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//声明一个结构体变量,用来初始化定时器
TIM_OCInitTypeDef TIM_OCInitStructure;//根据TIM_OCInitStruct中指定的参数初始化外设TIMx
/* 开启时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;// PB0
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(GPIOB,&GPIO_InitStructure);
/*TIM2定时器初始化*/
TIM_TimeBaseInitStructure.TIM_Period = 199; //PWM 频率=72000/(199+1)=36Khz//设置自动重装载寄存器周期的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 7199;//设置用来作为TIMx时钟频率预分频值
TIM_TimeBaseInitStructure.TIM_ClockDivision = 0;//设置时钟分割:TDTS= Tck_tim
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
//TIM向上计数模式
TIM_TimeBaseInit(TIM3, & TIM_TimeBaseInitStructure);
/*PWM初始化*/ //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//PWM输出使能
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OC3Init(TIM3,&TIM_OCInitStructure);//Timer2 CH3
//注意此处初始化时TIM_OC1Init而不是TIM_OCInit,否则会出错。因为固件库的版本不一样。
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能或者失能TIMx在CCR3上的预装载寄存器
TIM_Cmd(TIM3,ENABLE);//使能或者失能TIMx外设
}
int steeringmotor(void)
{
delay_init();
// TIM2_PWM_Init(199,7199);//初始化PWM的周期
// while(1)
// {
// delay_ms(10);
// TIM_SetCompare3(TIM3,5);//设定占空比,舵机角度为0°中
// delay_ms(1000);
// TIM_SetCompare3(TIM3,15);//设定占空比,舵机角度为90°右
// delay_ms(1000);
// TIM_SetCompare3(TIM3,25); //设定占空比,舵机角度为180°左
// }
}.h
#ifndef __SteeringMotor_H
#define __SteeringMotor_H
#include "sys.h"
#include "stm32f10x.h"
void Steer_pwm_init(void); //舵机pwm初始化
#define Steer_Right_90 TIM_SetCompare3(TIM3, 9) //右转90度
#define Steer_Right_45 TIM_SetCompare3(TIM3, 7) //右转45度
#define Steer_Front TIM_SetCompare3(TIM3, 17) //舵机摆正
#define Steer_Left_45 TIM_SetCompare3(TIM3, 23) //左转45度
#define Steer_Left_90 TIM_SetCompare3(TIM3, 26 ) //左转90度
#endif三、红外循迹代码
.c
#include "sensor.h"
void xunji_config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); // 使能PC端口时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE); // 使能PC端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; //选择对应的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//配置GPIO模式,输入上拉
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB端口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//配置GPIO模式,输入上拉
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化PC端口
}
void Read_xunji_Date(void)
{
xunji_1;
xunji_2;
xunji_3;
xunji_4;
xunji_5;
}.h
#ifndef __sensor_H
#define __sensor_H
#include "stm32f10x.h"
#define xunji_1 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_12)
#define xunji_2 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13)
#define xunji_3 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14)
#define xunji_4 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)
#define xunji_5 GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_3)
void xunji_config(void);
void Read_xunji_Date(void); //读循迹模块返回的值
#endif四、PWM控制小黄电机
.c
#include "motor.h"//1右前 2右后 3左前 4左后
#include "delay.h"
void CarGo(void)
{
TIM_SetCompare1(TIM4 , 975); //数值越大速度越慢
TIM_SetCompare2(TIM4 , 1199);//后
TIM_SetCompare3(TIM4 , 975);
TIM_SetCompare4(TIM4 , 1199); //后
}
void CarGo2(void)
{
TIM_SetCompare1(TIM4 , 920); //数值越大速度越慢
TIM_SetCompare2(TIM4 , 1199);//后
TIM_SetCompare3(TIM4 , 920);
TIM_SetCompare4(TIM4 , 1199); //后
}
void CarStop(void)
{
TIM_SetCompare1(TIM4 , 1199);
TIM_SetCompare2(TIM4 , 1199);
TIM_SetCompare3(TIM4 , 1199);
TIM_SetCompare4(TIM4 , 1199);
}
void CarBack(void)
{
TIM_SetCompare1(TIM4 , 1199);
TIM_SetCompare2(TIM4 , 900);
TIM_SetCompare3(TIM4 , 1199);
TIM_SetCompare4(TIM4 , 900);
}
void CarRight(void)
{
TIM_SetCompare1(TIM4 , 900);
TIM_SetCompare2(TIM4 , 1199);//右后
TIM_SetCompare3(TIM4 , 790);//前左
TIM_SetCompare4(TIM4 , 1199);//后
}
void CarBigRight(void)
{
TIM_SetCompare1(TIM4 , 1199);
TIM_SetCompare2(TIM4 , 975);//450
TIM_SetCompare3(TIM4 , 740);
TIM_SetCompare4(TIM4 , 1199);
}
void CarBigRight2(void)
{
TIM_SetCompare1(TIM4 , 1199);
TIM_SetCompare2(TIM4 , 850);//450
TIM_SetCompare3(TIM4 , 740);
TIM_SetCompare4(TIM4 , 1199);
}
void CaryuandiRight(void)
{
TIM_SetCompare1(TIM4 , 1199);
TIM_SetCompare2(TIM4 , 1199);
TIM_SetCompare3(TIM4 , 450);
TIM_SetCompare4(TIM4 , 1199);
}
void CarLeft(void)
{
TIM_SetCompare1(TIM4 , 790);//右前
TIM_SetCompare2(TIM4 , 1199);
TIM_SetCompare3(TIM4 , 900);
TIM_SetCompare4(TIM4 , 1199);//左 后
}
void CarBigLeft(void)
{
TIM_SetCompare1(TIM4 , 715);
TIM_SetCompare2(TIM4 , 1199);
TIM_SetCompare3(TIM4 , 1199);
TIM_SetCompare4(TIM4 , 890);
}
void CarBigLeft2(void)
{
TIM_SetCompare1(TIM4 , 590);
TIM_SetCompare2(TIM4 , 1199);
TIM_SetCompare3(TIM4 , 1199);
TIM_SetCompare4(TIM4 , 620);
}
void CarSpecialGo(void)
{
TIM_SetCompare1(TIM4 , 900); //数值越大速度越慢
TIM_SetCompare2(TIM4 , 1199);//后
TIM_SetCompare3(TIM4 , 1000);
TIM_SetCompare4(TIM4 , 1199); //后
}
void CarSpecialPlusGo(void)
{
TIM_SetCompare1(TIM4 , 880); //数值越大速度越慢
TIM_SetCompare2(TIM4 , 1199);//后
TIM_SetCompare3(TIM4 , 1000);
TIM_SetCompare4(TIM4 , 1199); //后
}
void CarSpecialLeft(void)
{
TIM_SetCompare1(TIM4 , 700);//右前
TIM_SetCompare2(TIM4 , 1199);//右后
TIM_SetCompare3(TIM4 , 1199);//左前
TIM_SetCompare4(TIM4 , 900);//左后
}
void CarSpecialRight(void)
{
TIM_SetCompare1(TIM4 , 1199);//右前
TIM_SetCompare2(TIM4 , 900);//右后
TIM_SetCompare3(TIM4 , 750);//左前
TIM_SetCompare4(TIM4 , 1199);//左后
}
void TIM4_PWM_Init(void) //TIM4的pwm设置和相应的引脚设置
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4 , ENABLE);
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 1199;
TIM_TimeBaseStructure.TIM_Prescaler = 1999;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM4 , &TIM_TimeBaseStructure);
//端口复用
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //初始化要用的B6/B7口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9; //初始化要用的口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 ; //PB.10端口配置
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.10
GPIO_ResetBits(GPIOB,GPIO_Pin_10);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //PB.11端口配置
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.11
GPIO_ResetBits(GPIOB,GPIO_Pin_11);
//PWM通道1
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC1Init(TIM4 , &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM4 , TIM_OCPreload_Enable);
//PWM通道2
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse =0;
TIM_OC2Init(TIM4 , &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM4 , TIM_OCPreload_Enable);
//PWM通道3
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC3Init(TIM4 , &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM4 , TIM_OCPreload_Enable);
//PWM通道4
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC4Init(TIM4 , &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM4 , TIM_OCPreload_Enable);
TIM_Cmd(TIM4 , ENABLE);
}.h
#ifndef __MOTER_H
#define __MOTER_H
#include "stm32f10x.h"
#define ENA PBout(11)
#define ENB PBout(10)
void TIM4_PWM_Init(void);
void CarGo(void);
void CarGo2(void);
void CarStop(void);
void CarBack(void);
void CarLeft(void);
void CaryuandiRight(void);
void CarBigLeft(void); //大左转
void CarBigLeft2(void);
void CarRight(void);
void CarBigRight(void); //大右转
void CarBigRight2(void);
void CarSpecialLeft(void);
void CarSpecialGo(void);
void CarSpecialPlusGo(void);
void CarSpecialRight(void);
#endif
五、main函数
1、解释
我的主函数有些啰嗦,以前写的,懒得改了。
大意就是:
分为两部分
第一部分代码表示循迹的时候可以避障
第一部分代码表示仅仅循迹
逻辑部分仅供参考!建议按自己的逻辑改改!!
已知:仅仅在直行的时候遇到一次障碍物
所以:我的避障在直行判断里面
if(b==0)(此为第一部分代码。b是标志位,目的是只执行一次避障)
{
if(直行判断)
{
直行
if(距离<30)(请按照实际情况修改参数)
{
避障逻辑(请按照实际情况修改逻辑)
b++;
}文章来源:https://www.toymoban.com/news/detail-454164.html
}
if(其他判断)
{左、右转弯等等
}
}
if(b==1)(此为第二部分代码。b是标志位,目的是只执行一次避障)
{
正常循迹判断
}
2、代码
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "Ultrasonic.h"
#include "motor.h"
#include "sensor.h"
#include "SteeringMotor.h"
int main(void)
{
// float length_res[5]={0}; //用来存放测距结果
int a=0,b=0,c=0,d=0;
char str[20];//用来存放浮点数字符
SystemInit(); // 配置系统时钟为72M
delay_init(); //延时初始化
xunji_config(); //循迹初始化
Ultrasonic_Init();
TIM4_PWM_Init();
Steer_pwm_init();
while(1)
{
Read_xunji_Date(); //读循迹线值
//车前4个循迹模块从右到左分别是xunji_4,xunji_3,xunji_2,xunji_1
//xunji_x=1白亮 x 2 3 x
if(b==0)
{
if(xunji_1==1&&xunji_2==0&&xunji_3==1&&xunji_4==1)//0100
{
CarRight(); //如果第二个读取到黑线,右转
continue;
}
if(xunji_1==0&&xunji_2==1&&xunji_3==1&&xunji_4==1)//1000
{
CarBigRight(); //如果第一个读取到黑线,大右转
continue;
}
if(xunji_1==1&&xunji_2==1&&xunji_3==0&&xunji_4==1)//0010
{
CarLeft();//如果第三个读取到黑线,左转
continue;
}
if(xunji_1==1&&xunji_2==1&&xunji_3==1&&xunji_4==0)//0001
{
CarBigLeft(); //如果第四个读取到黑线,大左转
continue;
}
if(xunji_1==1&&xunji_2==1&&xunji_3==1&&xunji_4==1)//0001
{
CarGo(); //如果都读取到白线,直走
if(Senor_Using()<30.00)//大 不撞
{
a++;
if(a==1)
{
Steer_Front;
delay_ms(700);
CarStop();
delay_ms(700);
Steer_Right_90 ;
delay_ms(700);
CarSpecialLeft();
delay_ms(530);
do
{
CarSpecialPlusGo();
delay_ms(700);
}while(Senor_Using()<50.00);
CarStop();
delay_ms(700);
CarSpecialRight();
delay_ms(670);
do
{
CarSpecialPlusGo();
delay_ms(1000);
}while(Senor_Using()<50.00);
CarStop();
delay_ms(700);
CarSpecialRight();
delay_ms(650);
do
{
CarSpecialGo();
delay_ms(100);
}while(xunji_1== 1&&xunji_2==1&&xunji_3==1&&xunji_4==1&&xunji_5==0);
CarStop();
delay_ms(1000);
Steer_Front;
delay_ms(700);
CarSpecialLeft();
delay_ms(500);
b++;
}
}
}
if(xunji_1==0&&xunji_2==0&&xunji_3==1&&xunji_4==1)
{
CarBigRight(); //如果右侧都黑且左侧都白,大右
continue;
}
if(xunji_3==0&&xunji_4==0&&xunji_1==1&&xunji_2==1)
{
CarBigLeft();//如果左侧都黑且右侧都白,大左
continue;
}
if(xunji_3==0&&xunji_4==0&&xunji_1==1&&xunji_2==0)
{
CarBigLeft();//如果左侧都黑且右侧都白,大左
continue;
}
if(xunji_1==0&&xunji_2==0&&xunji_3==0&&xunji_4==1)
{
CarBigRight(); //如果右侧都黑且左侧都白,大右
continue;
}
if(xunji_1==0&&xunji_4==0&&xunji_3==1&&xunji_2==1)
{
CarGo();
}
if(xunji_1==1&&xunji_4==1&&xunji_3==0&&xunji_2==0)
{
CarGo();
}
}
if(b==1)
{
if(xunji_1==1&&xunji_2==0&&xunji_3==1&&xunji_4==1)//0100
{
CarRight(); //如果第二个读取到黑线,右转
continue;
}
if(xunji_1==0&&xunji_2==1&&xunji_3==1&&xunji_4==1)//1000
{
CarBigRight2(); //如果第一个读取到黑线,大右转
delay_ms(10);
}
if(xunji_1==1&&xunji_2==1&&xunji_3==0&&xunji_4==1)//0010
{
CarLeft();//如果第三个读取到黑线,左转
continue;
}
if(xunji_1==1&&xunji_2==1&&xunji_3==1&&xunji_4==0)//0001
{
CarBigLeft2(); //如果第四个读取到黑线,大左转
delay_ms(10);
}
if(xunji_1==1&&xunji_2==1&&xunji_3==1&&xunji_4==1)//0001
{
CarGo2(); //如果都读取到白线,直走
}
if(xunji_1==0&&xunji_2==0&&xunji_3==1&&xunji_4==1)
{
CarBigRight2(); //如果右侧都黑且左侧都白,大右
delay_ms(10);
}
if(xunji_3==0&&xunji_4==0&&xunji_1==1&&xunji_2==1)
{
CarBigLeft2();//如果左侧都黑且右侧都白,大左
delay_ms(10);
}
if(xunji_3==0&&xunji_4==0&&xunji_1==1&&xunji_2==0)
{
CarBigLeft2();//如果左侧都黑且右侧都白,大左
delay_ms(10);
}
if(xunji_1==0&&xunji_2==0&&xunji_3==0&&xunji_4==1)
{
CarBigRight2(); //如果右侧都黑且左侧都白,大右
delay_ms(10);
}
if(xunji_1==0&&xunji_4==0&&xunji_3==1&&xunji_2==1)
{
CarGo2();
}
if(xunji_1==1&&xunji_4==1&&xunji_3==0&&xunji_2==0)
{
CarGo2();
}
}
}
}
.文章来源地址https://www.toymoban.com/news/detail-454164.html
到了这里,关于基于STM32F103的红外循迹 超声波避障小车的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[STM32F103C8T6]基于stm32的循迹,跟随,避障智能小车](https://imgs.yssmx.com/Uploads/2024/02/533808-1.png)