freemodbus移植
基于freemodbus1.6
使用HAL库
软件:stm32cubemx stm32cubeide后续会更新标准库的移植。以及rtos下的移植(尽量)
下载freemodbus1.6
这个获取方法网上到处都是,不细说了。
cubemx新建工程
新建工程只列出了与移植freemodbus相关的设置
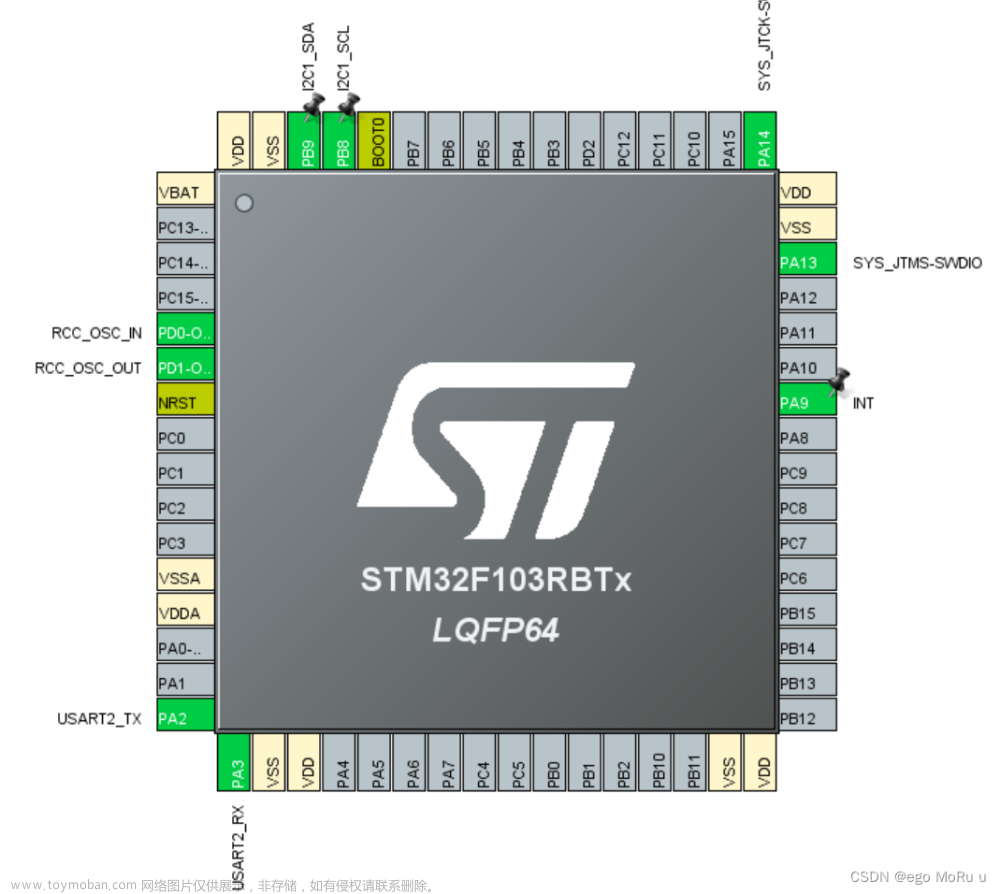
这里我使用的是485通信,所以额外使能了一个引脚
使能一个定时器,这里我用的是tim2。并且开始定时器2中断
其他设置如下图,参数其实设什么无所谓,因为后面要改的,我们并不用系统的初始化函数。
然后使能一个串口,我这里用的串口1,参数其实设什么无所谓,因为后面要改的,
这里可以把串口1和定时器2的最前面的取消勾选,就不会生成他们的初始化函数,不勾也没有太大关系,因为我们的函数在他之后,会覆盖掉系统的设置。
另外在中断优先级设置中,将串口优先级设置高于定时器2,数字越小越高。
相关的中断处理函数也要生成。
然后就可以generate code!生成代码。
代码修改
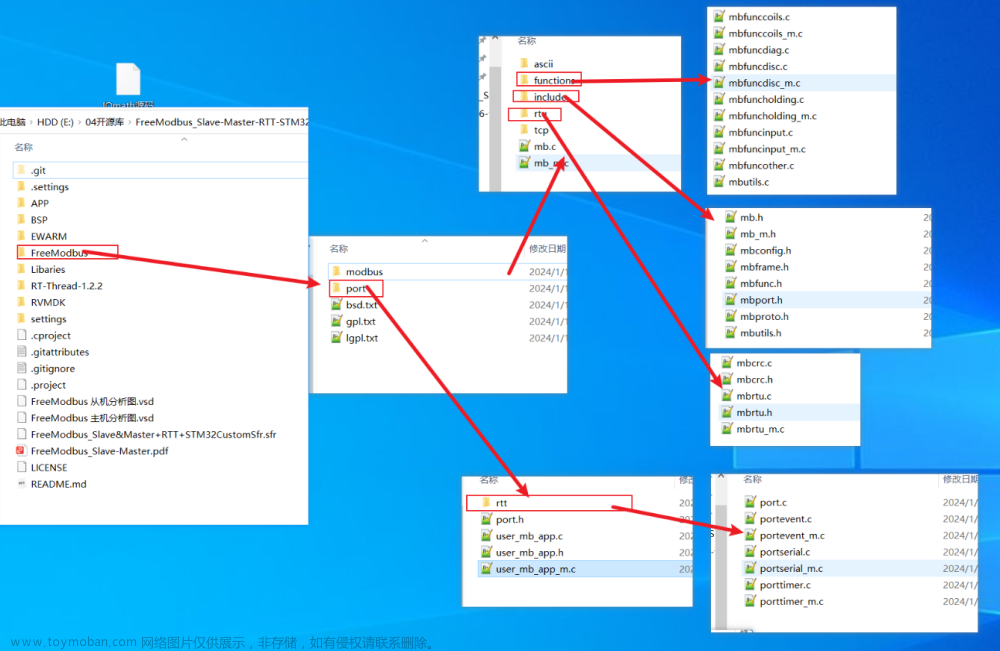
首先我们在我们项目的根目录中新建一个freemodbus文件夹,文件夹中再建一个modbus文件夹,一个port文件夹。
把你最开始下载下来的freemodbus中modbus文件夹中的内容复制到你刚才的modbus文件夹中,
把你最开始下载下来的freemodbus中demo/bare路径下的内容全部复制到你刚才的port文件夹中
然后我们进入cubeide,右键项目->属性,配置头文件和源文件路径。
把如图六个头文件路径添加。
把如图最下面两个源文件路径添加。
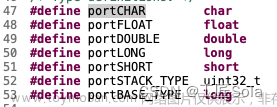
先在port.h文件中补充这两个宏定义,这是HAL库的全局中断开启、关闭函数。
ok,然后我们修改portserail.c
这两个函数前面的static标志去掉。
vMBPortSerialEnable函数修改如下
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
/* If xRXEnable enable serial receive interrupts. If xTxENable enable
* transmitter empty interrupts.
*/
if (xRxEnable) //将串口收发中断和modbus联系起来,下面的串口改为自己使能的串口
{
__HAL_UART_ENABLE_IT(&huart2,UART_IT_RXNE); //我用的是串口2,故为&huart2
HAL_GPIO_WritePin(EN485_GPIO_Port, EN485_Pin, GPIO_PIN_RESET);//
}
else
{
__HAL_UART_DISABLE_IT(&huart2,UART_IT_RXNE);
HAL_GPIO_WritePin(EN485_GPIO_Port, EN485_Pin, GPIO_PIN_SET);//
}
if (xTxEnable)
{
HAL_GPIO_WritePin(EN485_GPIO_Port, EN485_Pin, GPIO_PIN_SET);//
__HAL_UART_ENABLE_IT(&huart2,UART_IT_TXE);
}//
else
{
HAL_GPIO_WritePin(EN485_GPIO_Port, EN485_Pin, GPIO_PIN_RESET);//
__HAL_UART_DISABLE_IT(&huart2,UART_IT_TXE);
}
}
串口初始化函数如下
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
huart2.Instance = USART2;
huart2.Init.BaudRate = ulBaudRate;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
switch(eParity)
{
// 奇校验
case MB_PAR_ODD:
huart2.Init.Parity = UART_PARITY_ODD;
huart2.Init.WordLength = UART_WORDLENGTH_9B; // 带奇偶校验数据位为9bits
break;
// 偶校验
case MB_PAR_EVEN:
huart2.Init.Parity = UART_PARITY_EVEN;
huart2.Init.WordLength = UART_WORDLENGTH_9B; // 带奇偶校验数据位为9bits
break;
// 无校验
default:
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.WordLength = UART_WORDLENGTH_8B; // 无奇偶校验数据位为8bits
break;
}
return HAL_UART_Init(&huart2) == HAL_OK ? TRUE : FALSE;
}
收发字节函数如下
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
/* Put a byte in the UARTs transmit buffer. This function is called
* by the protocol stack if pxMBFrameCBTransmitterEmpty( ) has been
* called. */
HAL_GPIO_WritePin(EN485_GPIO_Port, EN485_Pin, GPIO_PIN_SET);//
if(HAL_UART_Transmit (&huart2 ,(uint8_t *)&ucByte,1,10) != HAL_OK )
return FALSE ;//HAL_UART_Transmit最后一位形参为最大发送时间,
//超出改时间退出发送,可能导致485发送失败,可稍微长一点。
else
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
/* Return the byte in the UARTs receive buffer. This function is called
* by the protocol stack after pxMBFrameCBByteReceived( ) has been called.
*/
HAL_GPIO_WritePin(EN485_GPIO_Port, EN485_Pin, GPIO_PIN_RESET);
if(HAL_UART_Receive (&huart2,(uint8_t *)pucByte,1,10) != HAL_OK )
return FALSE ;
else
return TRUE;
}
然后我们修改porttimer.c
首先依旧去掉这个函数前的static标志,方便之后调用,函数声明和函数实体前的static都要去掉
然后修改这几个函数:
定时器初始化函数
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 3599; // 50us记一次数
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = usTim1Timerout50us-1; // usTim1Timerout50us * 50即为定时器溢出时间
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
return FALSE;
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
return FALSE;
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
return FALSE;
}
return TRUE;
}
然后是定时器开启、关闭、中断服务函数
inline void
vMBPortTimersEnable( )
{
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
__HAL_TIM_CLEAR_IT(&htim2,TIM_IT_UPDATE);//避免程序一上电就进入定时器中断
__HAL_TIM_ENABLE_IT(&htim2,TIM_IT_UPDATE);
__HAL_TIM_SET_COUNTER(&htim2, 0); // 清空计数器
__HAL_TIM_ENABLE(&htim2); // 使能定时器
}
inline void
vMBPortTimersDisable( )
{
/* Disable any pending timers. */
__HAL_TIM_DISABLE(&htim2); // 禁能定时器
__HAL_TIM_SET_COUNTER(&htim2,0);
__HAL_TIM_DISABLE_IT(&htim2,TIM_IT_UPDATE);
__HAL_TIM_CLEAR_IT(&htim2,TIM_IT_UPDATE);
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
最后还有两处修改,有的教程中并没有提到这两处修改,应该是与vMBPortSerialEnable中使用USART_IT_TC还是USART_IT_TXE中断标志有关,如果使用USART_IT_TC中断的话需要添加这两处修改,就我目前使用USART_IT_TXE中断标志的情况下,加上这两处修改也并无问题,待后续研究明白了再更新
//启动第一次发送,进入发送完成中断
xMBPortSerialPutByte( ( CHAR )*pucSndBufferCur );
pucSndBufferCur++; /* next byte in sendbuffer. */
usSndBufferCount--;
//添加代码end
//插入代码begin
if(eStatus==MB_ENOERR)
{
xMBRTUTransmitFSM(); //发送一帧数据中第一个字节出发发送完成中断
}
//插入代码end


在系统的中断处理.c中添加以下的函数声明,有些教程是自己写的中断处理,这里我们还是用系统自己的。

void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
HAL_NVIC_ClearPendingIRQ(TIM2_IRQn);
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
串口中断函数:
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
if(__HAL_UART_GET_IT_SOURCE(&huart2, UART_IT_RXNE)!= RESET)
{
prvvUARTRxISR();//接收中断
}
if(__HAL_UART_GET_IT_SOURCE(&huart2, UART_IT_TXE)!= RESET)
{
prvvUARTTxReadyISR();//发送中断
}
HAL_NVIC_ClearPendingIRQ(USART2_IRQn);
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
在文档末尾user code 代码段添加定时器中断回调函数:
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* NOTE : This function Should not be modified, when the callback is needed,
the __HAL_TIM_PeriodElapsedCallback could be implemented in the user file
*/
if(htim->Instance == TIM2)
{
prvvTIMERExpiredISR( );
}
}
/* USER CODE END 1 */
回到main函数

首先包含几个头文件
在Private define段添加如下:
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//输入寄存器起始地址
#define REG_INPUT_START 0x0001
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0001
//保持寄存器数量
#define REG_HOLDING_NREGS 8
//线圈起始地址
#define REG_COILS_START 0x0001
//线圈数量
#define REG_COILS_SIZE 16
//离散寄存器起始地址
#define REG_DISCRETE_START 0x0001
//离散寄存器数量
#define REG_DISCRETE_SIZE 16
/* USER CODE END PD */
Private variables段添加如下:
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;
//保持寄存器内容
uint32_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;
//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x01,0x02};
//离散输入状态
uint8_t usRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x01,0x02};
uint8_t testfalg=0;
extern unsigned char NUM [];
/* USER CODE END PV */
Private function prototypes段添加如下:
/* USER CODE BEGIN PFP */
/**
* @Brief : 读输入寄存器处理函数,功能码04
* @param pucRegBuffer 保存输入寄存器值的缓存
* @param usAddress 寄存器地址
* @param usNRegs 读取个数
* @return?eMBErrorCode?
*/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( usAddress >= REG_INPUT_START )\
&& ( usAddress + usNRegs <= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/**
* @Brief : 读保持寄存器处理函数,功能码03
* @param pucRegBuffer
* @param usAddress
* @param usNRegs
* @param eMode
* @return?eMBErrorCode?
*/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress >= REG_HOLDING_START)&&\
((usAddress+usNRegs) <= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://�??? MB_REG_READ = 0
while(usNRegs > 0)
{
*pucRegBuffer++ = (uint8_t)(usRegHoldingBuf[iRegIndex] >> 8);
*pucRegBuffer++ = (uint8_t)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNRegs--;
}
break;
case MB_REG_WRITE://�??? MB_REG_WRITE = 1
while(usNRegs > 0)
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/**
*****************************************************************************
* @Name : 操作线圈
*
* @Brief : 对应功能�???0x01 -> eMBFuncReadCoils
* 0x05 -> eMBFuncWriteCoil
* 0x15 -> 写多个线�??? eMBFuncWriteMultipleCoils
*
* @Input : *pucRegBuffer:数据缓冲区,响应主机用
* usAddress: 寄存器地�???
* usNRegs: 操作寄存器个�???
* eMode: 功能�???
*
* @Output : none
*
* @Return : Modbus状�?�信�???
*****************************************************************************
**/
eMBErrorCode eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iNCoils = ( int )usNCoils;
unsigned short usBitOffset;
/* Check if we have registers mapped at this block. */
if( ( usAddress >= REG_COILS_START ) && ( usAddress + usNCoils <= REG_COILS_START + REG_COILS_SIZE ) )
{
usBitOffset = ( unsigned short )( usAddress - REG_COILS_START );
switch ( eMode )
{
/* Read current values and pass to protocol stack. */
case MB_REG_READ:
while( iNCoils > 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegCoilsBuf, usBitOffset, ( unsigned char )( iNCoils > 8 ? 8 : iNCoils ) );
iNCoils -= 8;
usBitOffset += 8;
}
break;
/* Update current register values. */
case MB_REG_WRITE:
while( iNCoils > 0 )
{
xMBUtilSetBits( ucRegCoilsBuf, usBitOffset, ( unsigned char )( iNCoils > 8 ? 8 : iNCoils ), *pucRegBuffer++ );
iNCoils -= 8;
usBitOffset += 8;
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/**
*****************************************************************************
* @Name : 操作离散寄存�???
*
* @Brief : 对应功能�???0x02 -> eMBFuncReadDiscreteInputs
*
* @Input : *pucRegBuffer:数据缓冲区,响应主机用
* usAddress: 寄存器地�???
* usNRegs: 操作寄存器个�???
*
* @Output : none
*
* @Return : Modbus状�?�信�???
*****************************************************************************
**/
//eMBErrorCode eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
//{
// pucRegBuffer = pucRegBuffer;
// return MB_ENOREG;
//}
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
eMBErrorCode eStatus = MB_ENOERR;
short iNDiscrete = ( short )usNDiscrete;
USHORT usBitOffset;
/* Check if we have registers mapped at this block. */
if( ( usAddress >= REG_DISCRETE_START ) && ( usAddress + usNDiscrete <= REG_DISCRETE_START + REG_DISCRETE_SIZE ) )
{
usBitOffset = ( USHORT )( usAddress - REG_DISCRETE_START );
while( iNDiscrete > 0 )
{
*pucRegBuffer++ =
xMBUtilGetBits( usRegDiscreteBuf, usBitOffset,( UCHAR )( iNDiscrete > 8 ? 8 : iNDiscrete ) );
iNDiscrete -= 8;
usBitOffset += 8;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/* USER CODE END PFP */
新建变量estatus 前后说的这些添加内容必须夹在user code字段中,否则cubemx修改工程重新生成代码后,你修改的内容会消失
初始化、使能
因为前面在串口初始化中,串口选择是被我写死的,不能通过这里的第三个形参去选择使用串口几,但是通过简单修改可以实现自由配置文章来源:https://www.toymoban.com/news/detail-454760.html
最后在main函数中启动轮询就可以了 文章来源地址https://www.toymoban.com/news/detail-454760.html
文章来源地址https://www.toymoban.com/news/detail-454760.html
最后你把想传出去的数据放在各个寄存器中,外部modbus主机就可以查询到你放入寄存器的数据了
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;
//保持寄存器内容
uint32_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;
//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x01,0x02};
//离散输入状态
uint8_t usRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x01,0x02};
uint8_t testfalg=0;
extern unsigned char NUM [];
/* USER CODE END PV */
到了这里,关于freemodbus移植进STM32(包含HAL库和标准库两种方法)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!