题目
B 题 无人机遂行编队飞行中的纯方位无源定位
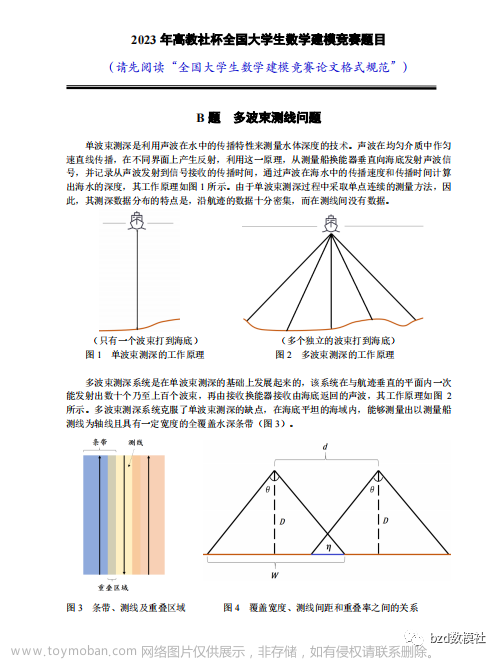
无人机集群在遂行编队飞行时,为避免外界干扰,应尽可能保持电磁静默,少向外发射电磁波信号。为保持编队队形,拟采用纯方位无源定位的方法调整无人机的位置,即由编队中某几架无人机发射信号、其余无人机被动接收信号,从中提取出方向信息进行定位,来调整无人机的位置。编队中每架无人机均有固定编号,且在编队中与其他无人机的相对位置关系保持不变。接收信号的无人机所接收到的方向信息约定为:该无人机与任意两架发射信号无人机连线之间的夹角(如图 1 所示)。例如:编号为 FY01、FY02 及 FY03 的无人机发射信号,编号为FY04 的无人机接收到的方向信息是 𝛼1,𝛼2 和 𝛼3。 图 1 无人机接收到的方向信息示意图
请建立数学模型,解决以下问题:
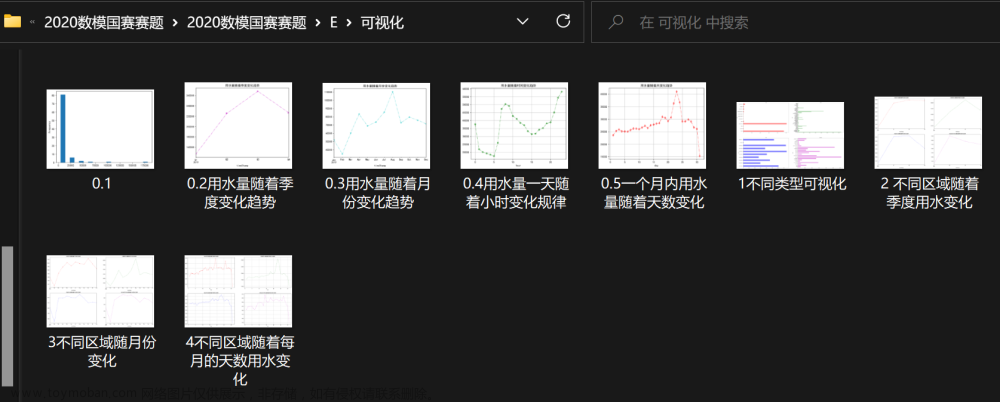
问题 1 编队由 10 架无人机组成,形成圆形编队,其中 9 架无人机(编号 FY01~FY09)均匀分布在某一圆周上,另 1 架无人机(编号 FY00)位于圆心(见图 2)。无人机基于自身感知的高度信息,均保持在同一个高度上飞行。
图 2 圆形无人机编队示意图
(1) 位于圆心的无人机(FY00)和编队中另 2 架无人机发射信号,其余位置略有偏差的无人机被动接收信号。当发射信号的无人机位置无偏差且编号已知时,建立被动接收信号无人机的定位模型。
(2) 某位置略有偏差的无人机接收到编号为 FY00 和 FY01 的无人机发射的信号,另接收到编队中若干编号未知的无人机发射的信号。若发射信号的无人机位置无偏差,除 FY00 和 FY01外,还需要几架无人机发射信号,才能实现无人机的有效定位?
(3) 按编队要求,1 架无人机位于圆心,另 9 架无人机均匀分布在半径为 100 m 的圆周上。当初始时刻无人机的位置略有偏差时,请给出合理的无人机位置调整方案,即通过多次调整,每次选择编号为 FY00 的无人机和圆周上最多 3 架无人机遂行发射信号,其余无人机根据接收
到的方向信息,调整到理想位置(每次调整的时间忽略不计),使得 9 架无人机最终均匀分布在某个圆周上。利用表 1 给出的数据,仅根据接收到的方向信息来调整无人机的位置,请给出具体的调整方案。
表 1 无人机的初始位置
无人机编号 极坐标 (m,∘) 0 (0, 0) 1 (100, 0) 2 (98, 40.10) 3 (112, 80.21) 4 (105, 119.75) 5 (98, 159.86) 6 (112, 199.96) 7 (105, 240.07) 8 (98, 280.17) 9 (112, 320.28)
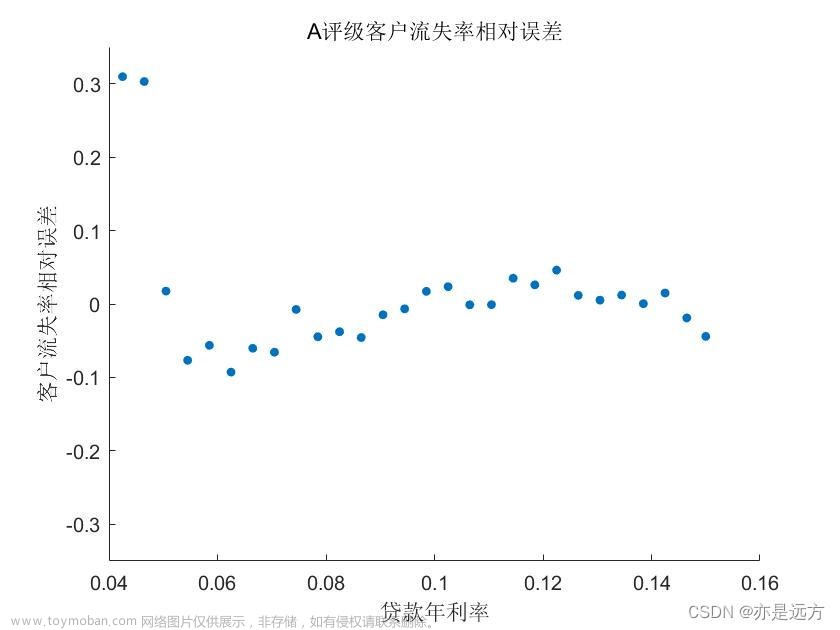
问题 2 实际飞行中,无人机集群也可以是其他编队队形,例如锥形编队队形(见图 3,直线上相邻两架无人机的间距相等,如 50 m)。仍考虑纯方位无源定位的情形,设计无人机位置调整方案。
图 3 锥形无人机编队示意图
解析
前言
数学建模主要是让大家构建自己的模型,只要能解决问题的模型就是好模型,无标准答案。我个人的分析过程大致如下文,仅个人观点不一定是正确的,不说太多怕限制了大家的思维哈哈哈。
问题一
1.1
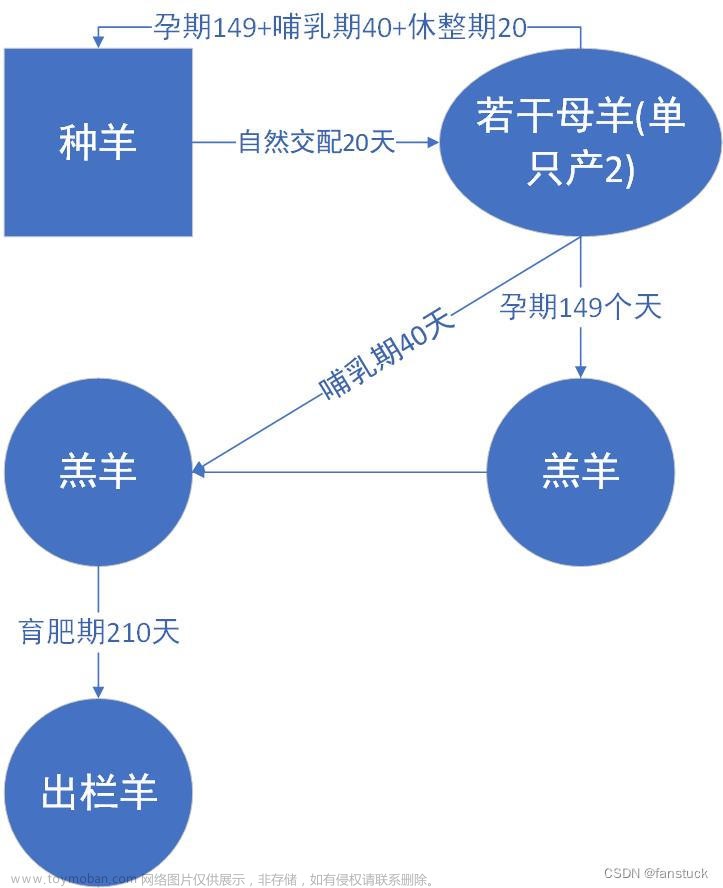
由于发送信号的无人机位置无偏差且编号已知,又个无人机按编号顺序排列,因此可以根据编号差结合三角函数关系构建模型。
如上图,蓝色为已知飞机,绿色未知。根据两个蓝色编号差就可以求出β1的大小,在圆中根据三角函数关系用α1与2表达出β2,将该β2与根据编号差所计算得到β2作差或做商得到一个影响因子,根据它就可以调整无人机位置,实现定位。
当然还会有多种无人机分布情况,是否用分段函数等具体情况就大家自己看情况了。
1.2
因为9驾飞机均匀分布因此可以初始化各个编号飞机的α角即角ABO的大小,运动过程中比较初始角与信号角的大小即可判断位置是否偏移,但是若只有OA两架飞机仍无法确定B需要朝那个方位移动调整角度,因此必须要更多的信号角度信息。
假设在多一个未确定飞机C的信号,根据角度信息可能会有C和C1两种情况,如下图所示,当在C位置时角OBC必大于角ABC,在C1位置时角OBC1必小于角ABC1,因此根据信号的角度信息可以确定C与B是同侧或异侧,题目给出只是略微偏移,而发信息飞机位置准确,因此根据信号角度与初始时的角度对比就可以知道发信号的C的编号,进而再对比OBA、OBC、ABC三个角的当前与初始角度,分析前后偏移与左右偏移从而推算B该朝何方位飞行。是否多加这一台就可以确定飞机如何调整定位大家自己验证,这是竞赛!!!
1.3
在初始位置有偏差的情况下,因为半径为100因此可以固定0和1的机位,其他飞机调整位置,0和1的信号必须接收,首先计算以0和1为基准的正九边形各点相对于01飞机的α角。注意这里题目要求的是给出具体方案,因此可以直接安排几号机给几号机发信号。这里有两种方案,一种用计算机思维利用类似粒子群算法进行整体调整;另一种就是利用正九边形下的α角与当前α的关系直接调。说说第二种方案,可以由近到远调,捆绑对称点,在选一个远点,例如对2就选对称点9以及同侧的最远点5进行调整。由于题目要求具体方案,因此最终方案一定要讲清楚调整规则及流程或是调整函数的构建,最好能具体化多次调整的相对角度大小。 文章来源:https://www.toymoban.com/news/detail-455619.html
文章来源:https://www.toymoban.com/news/detail-455619.html
问题二
这么多人看有亿点点压力,在重复一遍前言,数学建模主要是让大家构建自己的模型,只要能解决问题的模型就是好模型,无标准答案。这仅是我个人观点不一定是正确的,不说太多怕限制了大家的思维哈哈哈。
对于问题二,首先发射信号的无人机并不是固定的那几辆,要多次切换使得整体形成队形准确。可以直接卡死一号机的位置,让他作为整个队形的标准,始终发射信号。首先先边角三辆发射信号,其他飞机接收,其中每个飞机根据接收到的三个α角与标准等边三角形的α角的关系进行调整,调整都形成大致轮廓,但不一定就是标准队形。
接着切换为中间三个无人机发射信号,以同样方式继续调整各无人机位置。多次交替这两种信号发射方案,使得在切换方案时飞机的位置偏差越来越小,完成定位。
其中在接收信号飞机的定位可以参考上一大题的方案构建模型函数,无人机向α角标准化的方向移动,不断调整,得到整体的最优解。文章来源地址https://www.toymoban.com/news/detail-455619.html
到了这里,关于2022高教社杯全国大学生数学建模竞赛B题解析(更新完结)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!