前言
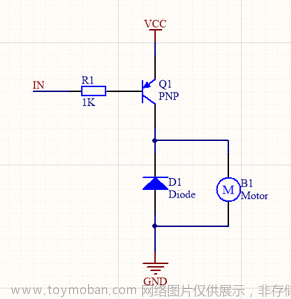
一般有关直流有刷电机的仿真都是直接高低电平驱动,或者ULN2003,这种电路是只能驱动小电压小功率的电机的,如果碰到电压稍高一些,电流大一些的电机,2003驱动是驱动不起来的,这时候对于大电流的电机,一般就是MOS管或者IGBT,相对来说,NMOS是经济实用之选,本节就带领大家使用单片机,搭建H桥驱动电路来驱动一个24V的直流有刷电机。整个程序我会附在最后。
先附上完整的仿真电路图一张,再逐个讲解:

要想使用H桥,就得需要一个半桥驱动芯片,当然,在市面上的各种驱动芯片应有尽有,半桥驱动芯片,三相桥集成驱动芯片等等,但在protues中,我只找到一款IR2101驱动,这是一款高压驱动芯片,24V算是低压的,不过也没关系了,只能用这个,仿真应该是可以的。
首先就是绘制H桥驱动电路:

这是我绘制的H桥驱动电路,这个电路在驱动原理上是没有什么问题的,我做了简化,真实的驱动电路中还需要加入一些其他的电路以及二极管,如图:

这个二极管的作用更大一些。
G极电阻并联二极管的作用:
因为MOS管内部都是有极间电容的,也就是说,在MOS的G极与S极之间有电容,也就是说,G极出来的这个电阻与GS极间电容形成一个RC充放电电路:如图:

调节这个电阻就可以调节MOS输出的PWM由低电平到高电平的上升时间,上升实际太长或太短都不太好,根据实际情况选择电阻。
而PWM由高变低时的下降时间,同样时间常数也是由这个RC共同决定的,因此如果在G极电阻上并联一个二极管,放电的时候直接经过这个二极管把电流放出去,那么下降时间就会比较快。
当然,这个看你想不想加,想加的话按照图上自己添加即可。
这里需要提一下超过5V的电源怎么添加:
1.首先在图中的位置选中电源添加一个电源:

2.随后双击电源,修改电压,一定要有“+”号:

然后就是驱动芯片电路了:

驱动信号的左边HIN与LIN也就是控制驱动芯片输出的两个输入信号了,也就是接入单片机,单片机输出是5V信号,而且电流小,是不可以直接驱动MOS管的,驱动芯片的作用实际就是增压扩流的作用,驱动芯片右边的HO也就是跟HIN的输入信号波形一致,但是是12V的,而且电流比较大,LO也是同样的。
当然,大家应该也都看到了那个C1,C2电容,这两个电容是半桥驱动的精髓,重中之重,没有这个电容,半桥是无法工作的,如图:

这两个电容俗称自举电容,或泵电容。这个不是某种特殊电容,而是按照功能给它起的名字,因为这个电容会把电压抬升上来,就像水泵一样,随意叫泵电容,驱动芯片的供电是12V,H桥的电压是24V,C1这个泵电容与D1这个二极管结合,会把电压抬升到36V,这就牵涉到另外一个知识点:为什么H桥上管的PWM不能发100%占空比。
有关自举电容或泵电容的详细解释,请自行百度,百度的解释肯定比我的解释要专业得多,电路这部分内容展开就没边了。只需要记住这个自举电容与它旁边的二极管比较重要即可,没有这两个,有可能电机也可以转,但电机是转不好的,稍后我们测试一下。
然后我们来测试一下,电路行不行,按照电机驱动的原理:

按照上图的驱动原理,Q5发送PWM控制电流,Q7,Q6关闭,Q8打开,让电流经过Q5,电机,从Q8回到负极,电机就可以正转了,如此的话,反转也是一样的道理,Q6发PWM,Q5,Q8关闭,Q7打开,那么电机就会反转了,我们先不写程序,使用proteus自带的脉冲模块来试一下:

此时电机旋转如图:

GIF看不清楚转速,我就截图了,最后转速是在600转左右:

如果我们把那个自举电容去掉呢?如图:


最后电机只能到200转,差距还是很大的。
现在我们是使用的proteus自带的脉冲模块来控制的电机,接下来就要使用单片机来控制了。因为proteus里没有东西能够测量直流电机的实际转速,所以也就只能开环控制,只能调节占空比了。因此我们使用LCD1602来显示当前的占空比,对于LCD1602的驱动说明,还有我的LCD1602源码,可以查看之前的文章:https://www.icxbk.com/article/detail/1067.html 这里就不在赘述了。
然后我们整理一下单片机发送PWM的思路,由于51单片机是没有单独的PWM模块的,因此只能使用IO口来模拟PWM,如果要控制精确一些,就需要定时器的配合,因此,我们需要选用一个定时器来计时,然后在定时器中断中自加一个变量,然后用那个变量来确定IO口发多长时间的高电平,多长时间的低电平。我们先确定控制MOS的引脚,程序中也先声明一下:


我们就先发送50%占空比,按照之前的思路,程序如下:
#include <reg52.h>
#include "1602.h"
#define uchar unsigned char
#define uint unsigned int
sbit leftH = P1^3;
sbit leftL = P1^4;
sbit rightH = P1^5;
sbit rightL = P1^6;
uint counter = 0; //定时器计数
uint pulse = 0; //占空比值
/@@*中断初始化*/
void irq_init(void)
{
TMOD = 0x01; //T 模式1,十六位计数器
TL0 = (65535-500)/256;
TH0 = (65535-500)%256;
ET0 = 1; //允许TO中断
TR0 = 1; //关闭T0
EA = 1; //允许总中断
}
void main()
{
irq_init(); //中断初始化
while(1)
{
pulse = 50;
}
}
/@@*********************************************************/
// 定时器0中断服务程序.
/@@*********************************************************/
void timer0 () interrupt 1
{
TH0 = (65535-500)/256; //500us
TL0 = (65535-500)%256; //500us
counter ++; //计数值自加
if(counter >= 100)
counter = 0;
if(counter < pulse)
{
leftH = 1;
leftL = 0;
rightH = 0;
rightL = 1;
}
else
{
leftH = 0;
leftL = 0;
rightH = 0;
rightL = 1;
}
}我们来看上面程序,定时器定时500us进入一次中断,然后counter进行自加计数,计数达到100时清零,当counter小于我们设定的pulse时,leftH就发送高电平,反之则是低电平,这样就相当于是STM32的PWM1模式了,在主函数的while循环中,设定pulse占空比为50,50/100也就是50%占空比。
然后我们仿真一下,这时候报错了:

没关系,这个是proteus软件参数没有设置对,最小电导Minimum conductance设置得太小了,改一下即可:

选择System->Set Animation Options 我这里是Proteus8.6,也就是倒数第三个:

然后点SPICE Options:

就是这个GMIN出了问题,我这里是1e-012,把这个修改成1e-05就好了,就是把这个数增大点:

然后开始运行,可以看到电机已经可以转起来了,说明我们的PWM起作用了。

然后我们把占空比显示在LCD上,程序如下:
/@@*显示函数*/
void display(void)
{
char str[20];
sprintf((char *)str,"Pulse:%d",pulse);
print_string(str,1);
}
void main(void)
{
irq_init(); //中断初始化
lcd_init(); //LCD初始化
while(1)
{
pulse = 50;
display();
}
}效果如图:

然后,我们这个功能不完善,因为只能在程序上调占空比,至少要有两个按键来加减速的,因此,我们在电路上再加入两个按键:

然后把按键检测的程序写上:
sbit key1 = P3^0; //加速
sbit key2 = P3^1; //减速
uint key_result = 0; //保存按键结果
void key_delay(uchar t)
{
int j;
for(;t!=0; t--)
for (j=0;j<255;j++);
}
/@@*按键检测 如果按键1被按下就返回1
如果按键2被按下就返回2 如果没有按键按下就返回0*/
uint key_scan(void)
{
uint result = 0;
/@@*先将按键电平拉高*/
key1 = 1;
key2 = 1;
/@@*检测按键1是否被按下*/
if(key1 == 0)
{
key_delay(5);
if(key1 == 0)
{
result = 1;
}
}
/@@*检测按键2是否被按下*/
if(key2 == 0)
{
key_delay(5);
if(key2 == 0)
{
result = 2;
}
}
return result;
}上面程序中,如果没有按键按下,就会返回0,按键1按下就会返回1,按键2按下就会返回2。然后我们在根据返回值来修改占空比即可,此时主函数修改如下:
void main(void)
{
irq_init(); //中断初始化
lcd_init(); //LCD初始化
while(1)
{
display();
key_result = key_scan();
/@@*按键1按下则占空比增加*/
if(key_result == 1)
{
pulse = pulse + 10;
if(pulse > 99)
pulse = 99;
}
/@@*按键2按下则占空比减少*/
else if(key_result == 2)
{
pulse = pulse - 10;
if(pulse < 0)
pulse = 0;
}
}
}由于我在仿真中使用的是带惯性负载的电机,因此电机转速变化会比较慢,最后放一个综合起来的效果图:

本篇就只做了电机正转的程序,反转举一反三即可,改动不大,而且本篇对于电源部分的降压电路,24V转12V,12V转5V并没有画出,这一点注意。
我的工程目录如图:

关于1602的驱动程序,在之前的文章已经贴上的所有程序。链接:【Proteus】单片机配合矩阵键盘LCD1602制作简易计算器 - 知乎
因此,这个工程我就只贴主文件的程序了。
main.c程序如下:文章来源:https://www.toymoban.com/news/detail-456600.html
#include <reg52.h>
#include "1602.h"
#include <stdio.h>
#define uchar unsigned char
#define uint unsigned int
sbit leftH = P1^3;
sbit leftL = P1^4;
sbit rightH = P1^5;
sbit rightL = P1^6;
sbit key1 = P3^0; //加速
sbit key2 = P3^1; //减速
uint counter = 0; //定时器计数
uint pulse = 0; //占空比值
uint key_result = 0; //保存按键结果
void key_delay(uchar t)
{
int j;
for(;t!=0; t--)
for (j=0;j<255;j++);
}
/@@*按键检测 如果按键1被按下就返回1
如果按键2被按下就返回2 如果没有按键按下就返回0*/
uint key_scan(void)
{
uint result = 0;
/@@*先将按键电平拉高*/
key1 = 1;
key2 = 1;
/@@*检测按键1是否被按下*/
if(key1 == 0)
{
key_delay(5);
if(key1 == 0)
{
result = 1;
}
}
/@@*检测按键2是否被按下*/
if(key2 == 0)
{
key_delay(5);
if(key2 == 0)
{
result = 2;
}
}
return result;
}
/@@*中断初始化*/
void irq_init(void)
{
TMOD = 0x01; //T 模式1,十六位计数器
TL0 = (65535-500)/256;
TH0 = (65535-500)%256;
ET0 = 1; //允许TO中断
TR0 = 1; //关闭T0
EA = 1; //允许总中断wmen
}
/@@*显示函数*/
void display(void)
{
char str[20];
sprintf((char *)str,"Pulse:%d",pulse);
print_string(str,1);
}
void main(void)
{
irq_init(); //中断初始化
lcd_init(); //LCD初始化
while(1)
{
display();
key_result = key_scan();
/@@*按键1按下则占空比增加*/
if(key_result == 1)
{
pulse = pulse + 10;
if(pulse > 99)
pulse = 99;
}
/@@*按键2按下则占空比减少*/
else if(key_result == 2)
{
pulse = pulse - 10;
if(pulse < 0)
pulse = 0;
}
}
}
/@@*********************************************************/
// 定时器0中断服务程序.
/@@*********************************************************/
void timer0 () interrupt 1
{
TH0 = (65535-500)/256; //500us
TL0 = (65535-500)%256; //500us
counter ++; //计数值自加
if(counter >= 100)
counter = 0;
if(counter < pulse)
{
leftH = 1;
leftL = 0;
rightH = 0;
rightL = 1;
}
else
{
leftH = 0;
leftL = 0;
rightH = 0;
rightL = 1;
}
}喜欢就点个赞喔!文章来源地址https://www.toymoban.com/news/detail-456600.html
到了这里,关于【Proteus】单片机H桥驱动24V直流有刷电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!