CAS
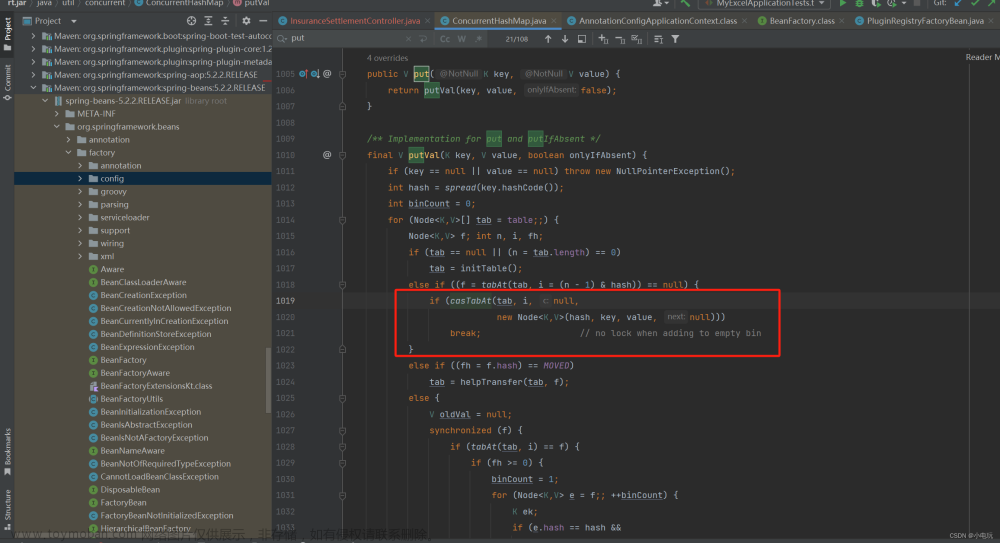
CAS(Compare And Swap)是一种并发控制机制,用于解决多线程并发访问共享资源时的数据一致性问题。
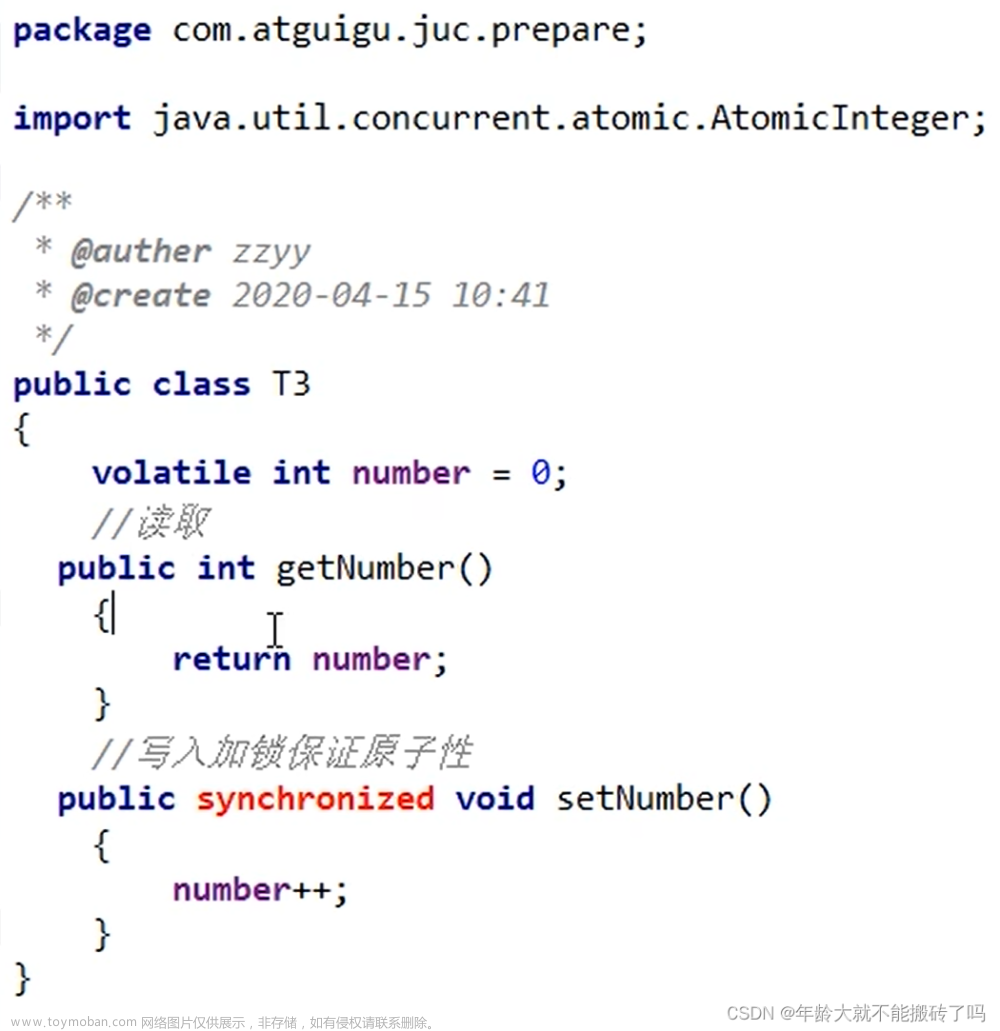
在Java中,CAS操作通常使用Atomic类来实现。例如,可以使用java.util.concurrent.atomic.AtomicInteger类来实现对整数类型的原子操作。Atomic类提供了一系列的原子操作方法,例如getAndAdd、getAndSet、compareAndSet等,可以用于实现CAS操作。
/**
* Atomically sets the value to the given updated value
* if the current value {@code ==} the expected value.
*
* @param expect the expected value
* @param update the new value
* @return {@code true} if successful. False return indicates that
* the actual value was not equal to the expected value.
*/
public final boolean compareAndSet(int expect, int update) {
return unsafe.compareAndSwapInt(this, valueOffset, expect, update);
}
这些CAS原子操作实际上都是Unsafe类提供的一系列native方法。
public final native boolean compareAndSwapInt(Object var1, long var2, int var4, int var5);
CAS操作包括三个参数:内存位置V、旧的预期值A和新的值B。当且仅当内存位置V的值等于预期值A时,CAS操作才会将内存位置V的值更新为新的值B,否则不会进行任何操作。CAS操作是原子性的,因此可以保证多线程并发访问共享资源时的数据一致性。
CAS操作虽然可以保证数据的一致性,但是在高并发场景下,可能会出现ABA问题。ABA问题是指,在CAS操作中,如果内存位置V的值在操作过程中被修改了两次,且第一次修改后又被修改回原来的值,那么CAS操作会误认为内存位置V的值没有被修改过,从而导致数据的不一致性。为了解决ABA问题,可以使用版本号机制,即在每次修改内存位置V的值时,都将版本号加1,从而避免出现ABA问题。
AQS
AQS(AbstractQueuedSynchronizer)是Java中用于实现同步器的基础框架,例如ReentrantLock、Semaphore、CountDownLatch等。AQS的核心思想是使用一个FIFO的等待队列来管理线程的竞争和等待,从而实现同步器的功能。使用volatile保证可见性,使用CAS保证原子性。
AQS的实现原理可以简单地概括为以下几个步骤:
1. 定义一个内部类Node,用于表示等待队列中的节点。每个节点包含一个线程引用和一个状态值,用于表示线程的状态(例如等待、唤醒、取消等)。
2. 定义一个volatile类型的int变量state,用于表示同步器的状态。state的值可以被多个线程同时访问和修改,因此需要使用volatile关键字来保证其可见性和原子性。
3. 定义一个等待队列,用于存储等待线程的节点。等待队列是一个FIFO的队列,每个节点都包含一个前驱节点和一个后继节点,用于维护队列的顺序。
4. 定义一个acquire()方法,用于实现线程的获取同步器。acquire()方法首先会尝试获取同步器的状态,如果状态符合要求,则直接返回;否则,将当前线程封装成一个节点,并加入等待队列中。如果当前线程是等待队列中的第一个节点,则会尝试获取同步器的状态,如果获取成功,则将当前节点从等待队列中移除,并返回。文章来源:https://www.toymoban.com/news/detail-458308.html
5. 定义一个release()方法,用于实现线程的释放同步器。release()方法首先会更新同步器的状态,然后尝试唤醒等待队列中的下一个节点。如果唤醒成功,则将该节点从等待队列中移除,并将其状态设置为可运行状态,从而使其可以继续执行。文章来源地址https://www.toymoban.com/news/detail-458308.html
到了这里,关于Java CAS和AQS的实现原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!