一、涉及资源
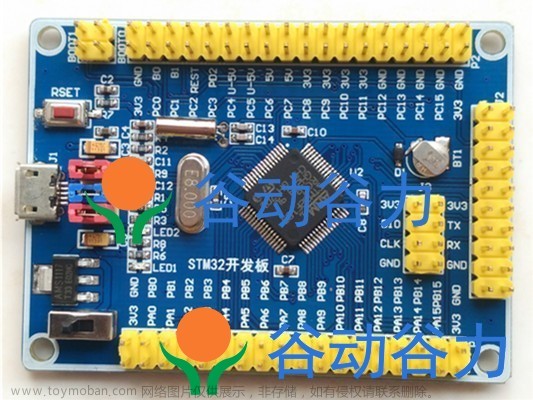
stm32f103ZET6开发板(非指定)
MG513P3012V型号电机(带霍尔编码器)(非指定)
二、涉及概念
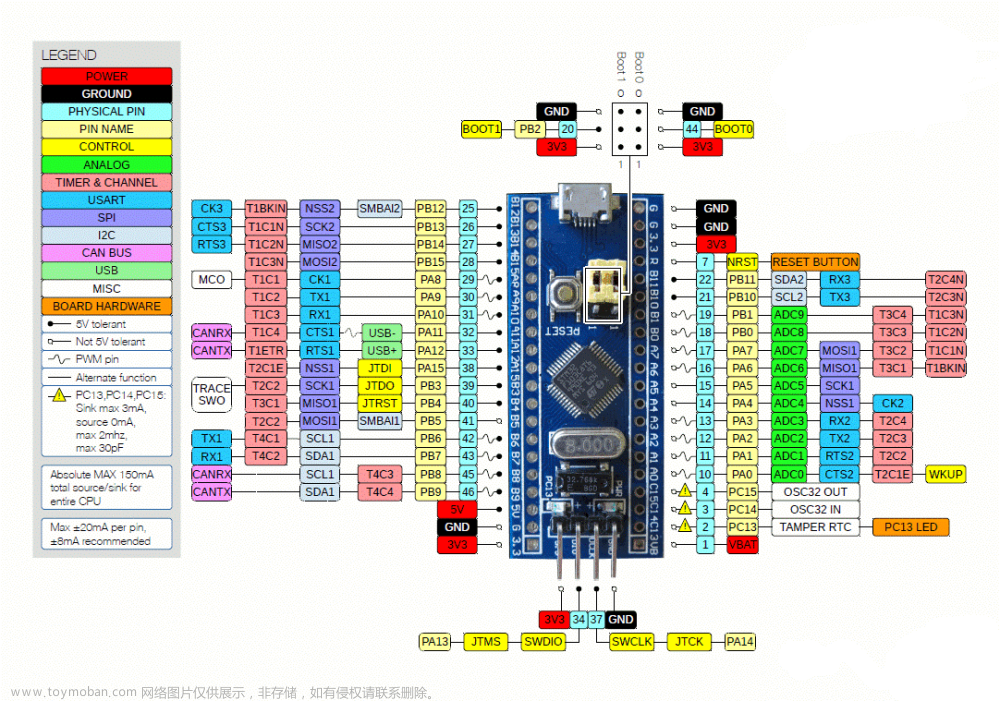
1、单片机资源要求
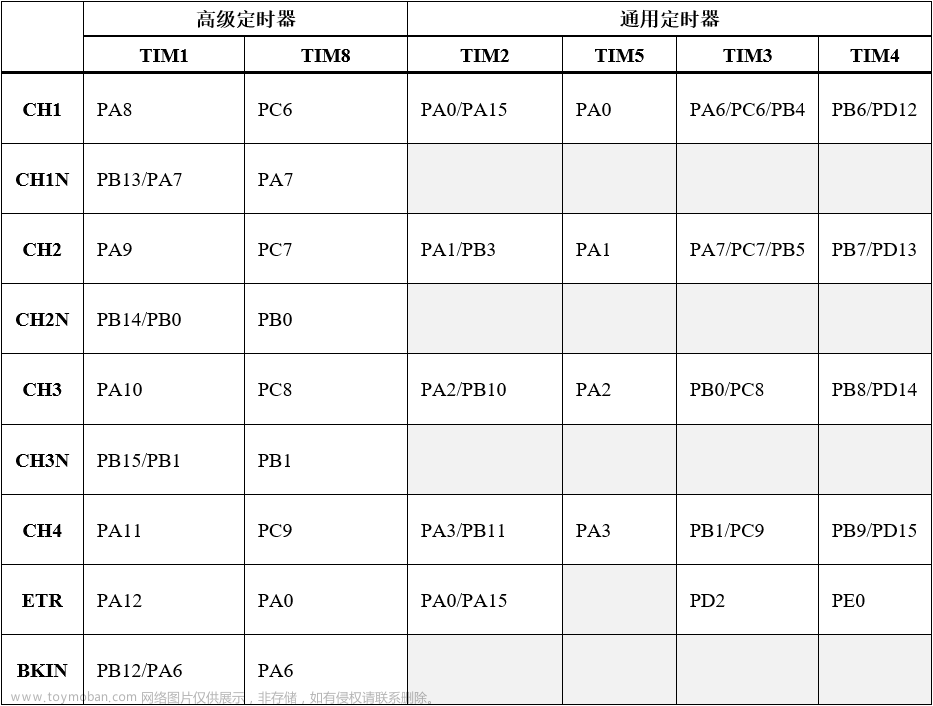
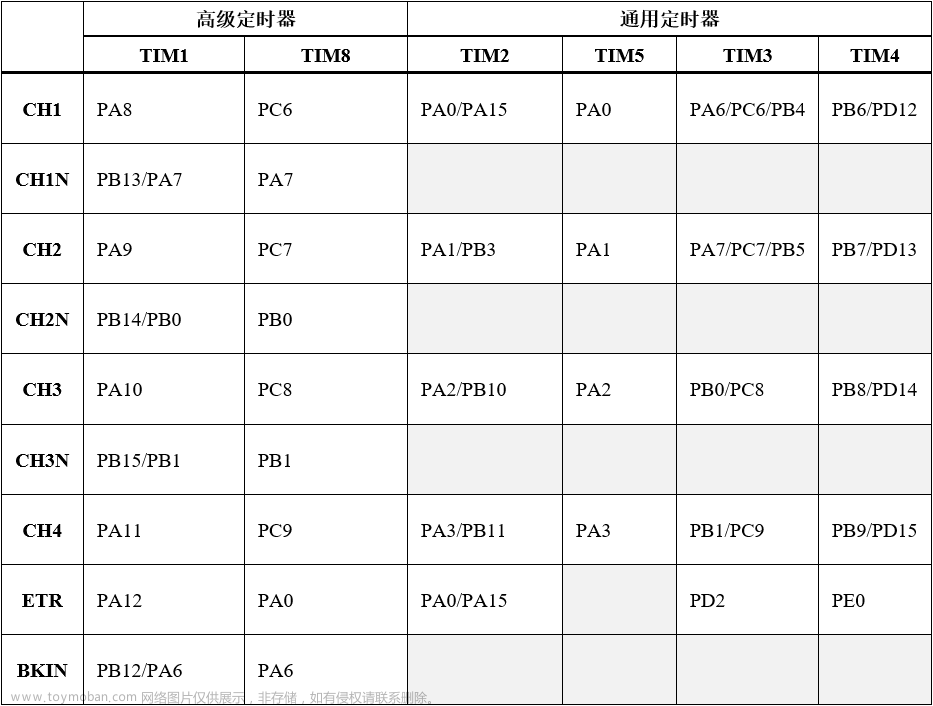
此种测速方法要求单片机的定时器具有编码器模式,对于stm32f1系列,具备编码器模式的定时器有TIM1/2/3/4/5/8,定时器使用通道1、2来实现编码器功能,接线时注意把A/B相接到定时器通道1/2的引脚。
2、减速比
电机结构
减速结构
减速比为1:30通俗地讲就是当电机外伸轴转1圈时实际轴转30圈,外伸轴我们一般接上轮胎等实际作用物体,而实际轴是电机自身的转子,霍尔编码器的检测对象是实际轴
3、测速原理
霍尔编码器工作方式
霍尔编码器是一种通过磁电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。霍尔编码器是由霍尔码盘和霍尔元件组成。霍尔码盘是在一 定直径的圆板上等分地布置有不同的磁极。电机旋转一圈霍尔元件发出特定数目的脉冲信号。,用时间间隔内接收的总的脉冲数目除以转一圈发出的脉冲数目即可得到转轴转的圈数,再除以时间间隔就能得到转速。 为判断转向,一般输出两组存在一定相位差的方波信号。
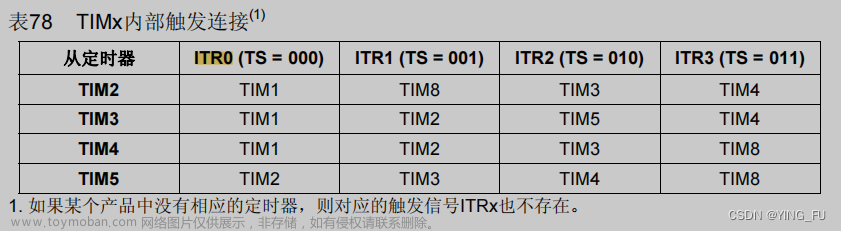
定时器判断电机正反转的依据
定时器通道1、通道2接收A相和B相的脉冲信号,转一圈A相和B相发出的脉冲数目是一样的,但是发送有先后之分。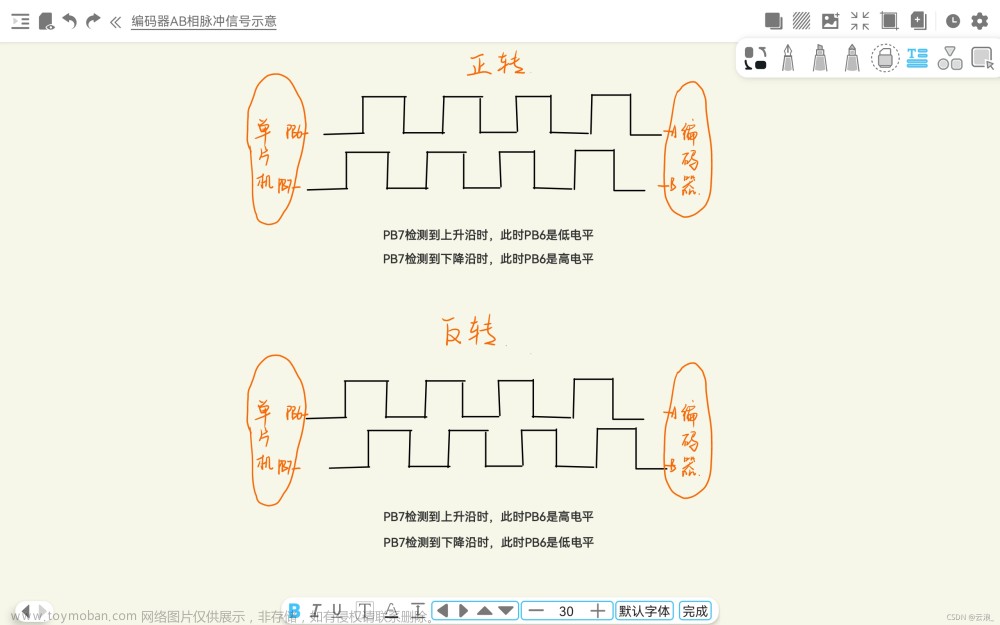
定时器针对正反转的两种计数方式
定时器在编码器模式下有两种计数方式,正转时是从重载值开始向下减数,反转时是从零开始向上加数(正反是相对而言的)。例如,如果我设定定时器的重载值为0x7fff,那么当定时器接收到10个正转的脉冲时,计数值变为0x7ff3,当定时器接收到的是反转的脉冲时,定时器的计数值变为0x000A。
定时器编码器模式1、2、3
TI1和TI2分别为定时器的通道1和通道2
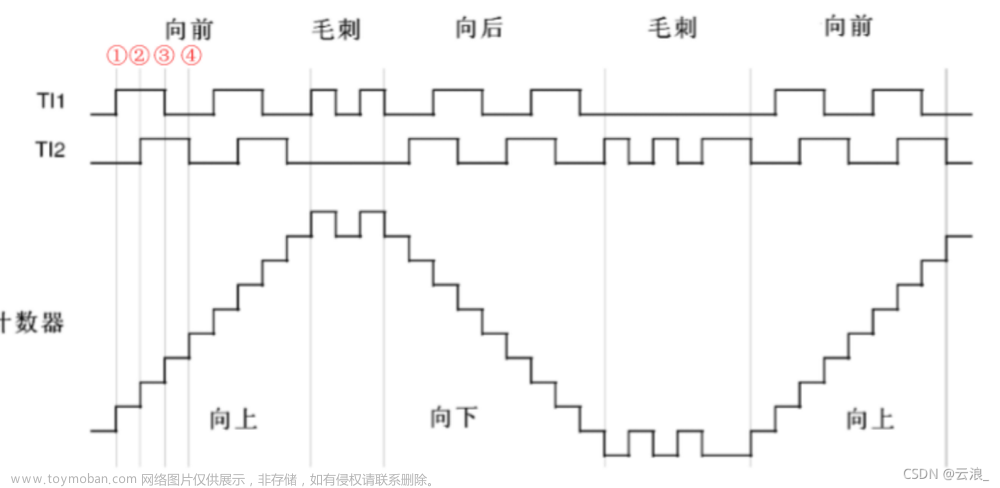
编码器模式3即为四倍频模式,这个模式下对于A和B相发过来的一组脉冲会有四次计数(四个跳变沿),这样就能将检测精度提到四倍。
4、M法测速

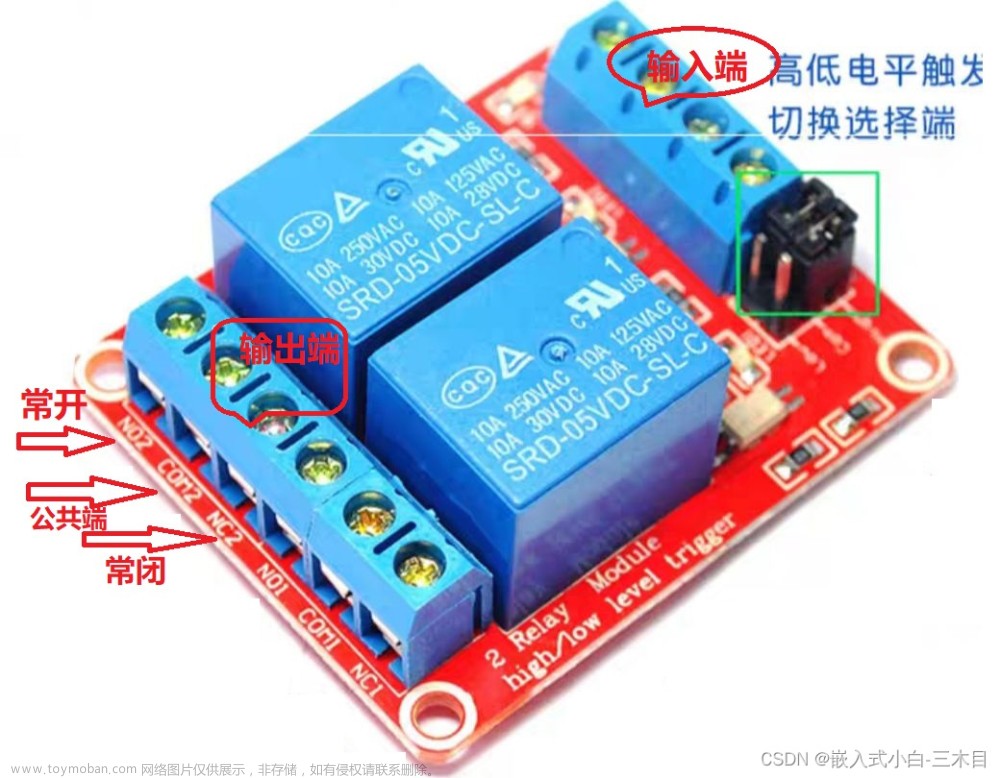
三、编码器与单片机的接线
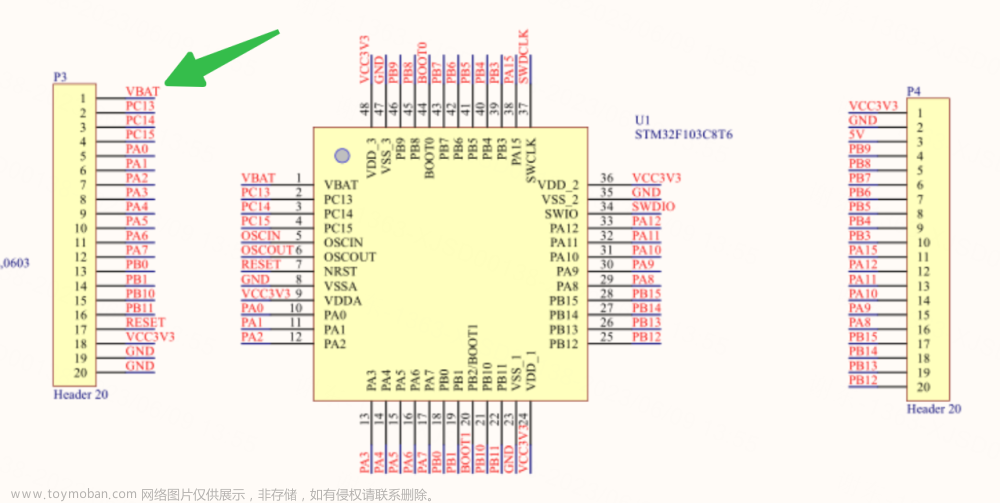
注:这里以stm32f1系列的定时器4为例,若使用其他定时器进行测速需要更换对应的引脚资源,编码器A/B相需接到定时器的通道1和通道2
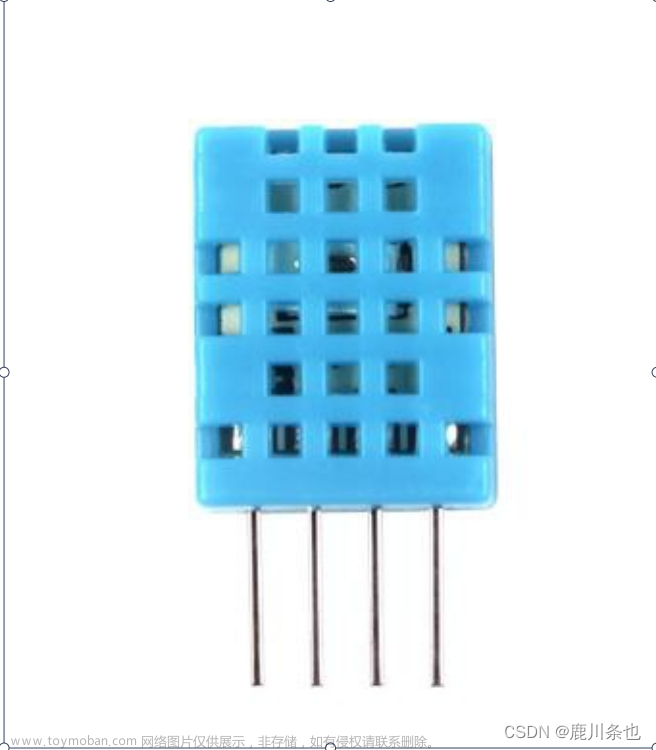
1、霍尔编码器实物图
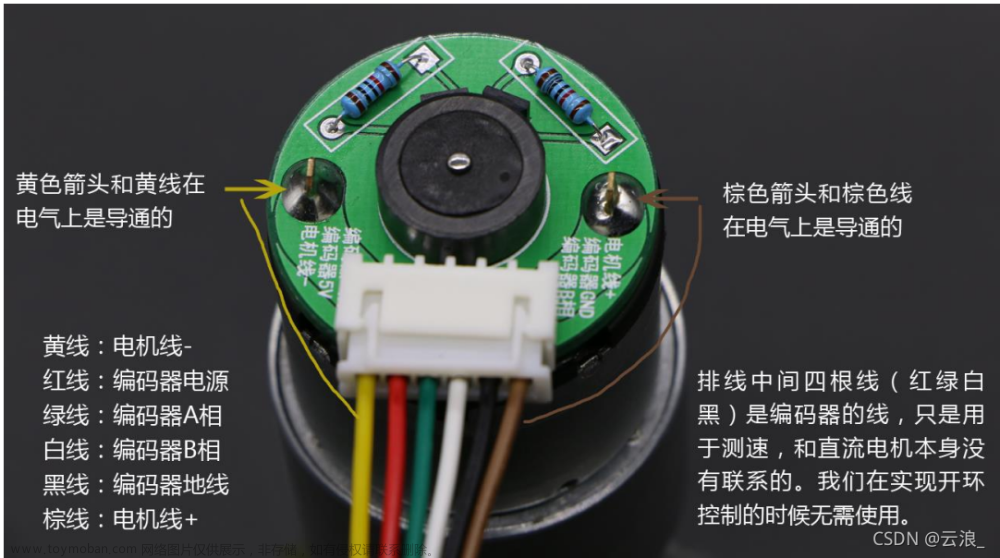
接线
编码器A相和B相接PB6和PB7引脚(无对应要求)
四、单片机引脚和定时器的初始化
1、代码示例
引脚选择PB6和PB7
定时器选择TIM4,使用编码器模式3
/*****************************************************
*@Func: 编码器涉及资源的初始化
******
*@para:
******
*@desc: 选择TIM4作为此编码器的解码时钟
****** 设置重装值
****** 注意:实际使用时对转速有限制,如果转速太快可能发生定时器溢出的情况,就要考虑使用中断
****** 目前对脉冲一次定时仅能计32768次,超过即无效,可以分别正反转。
****** 定时器在编码器模式下电机如果正转计数器会从零开始正数,如果反转计数器会从重载值开始倒数
******************************************************/
void EncoderA_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 引脚初始化的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 定时器初始化的结构体
TIM_ICInitTypeDef TIM_ICInitStructure; // 定时器编码器模式初始化的结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); // 使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 使能GPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; // PB6、PB7
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); // 根据GPIO_InitStructure的参数初始化GPIOB0
TIM_TimeBaseStructure.TIM_Period = 0xffff; // 设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler = 0; // 预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); // 根据TIM_TimeBaseInitStruct的参数初始化定时器TIM4
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3:CH1、CH2同时计数,四分频
//初始化TIM4输入捕获参数
TIM_ICStructInit(&TIM_ICInitStructure); // 把TIM_ICInitStruct 中的每一个参数按缺省值填入
TIM_ICInitStructure.TIM_ICFilter = 0x03; // IC1F=0011 配置输入滤波器(连续采样八次)
TIM_ICInit(TIM4, &TIM_ICInitStructure); // 根TIM_ICInitStructure参数初始化定时器TIM4编码器模式
TIM_Cmd(TIM4, ENABLE); // 使能定时器4
}
五、读定时器的计数值
定时器的计数值即为编码器发出的脉冲数目*4(定时器的编码器模式3)
/*****************************************************
*@Func: 读取定时器计数值
******
*@para:
******
*@desc:
******************************************************/
void Read_EncoderA(void)
{
if(TIM4->CNT > 0x7fff)
{
EncoderA = TIM4->CNT - 0xffff; // 反转
}
else
{
EncoderA = TIM4->CNT; // 正转
}
TIM4->CNT = 0xffff;
}
六、由定时器计数值得到转速
1、计算公式
使用M法测速,计算公式为:
转速n = 总脉冲数/四倍频/单圈脉冲数/减速比/时间间隔文章来源:https://www.toymoban.com/news/detail-458448.html
2、代码示例
电机转一圈本款霍尔编码器发出13个脉冲,本款电机的减速比为1:30文章来源地址https://www.toymoban.com/news/detail-458448.html
/*****************************************************
*@Func: 获取电机A的速度
******
*@para:
******
*@desc: 返回的是电机的转速 n圈/s
****** 转速n = 总脉冲数/四倍频/单圈脉冲数/减速比/时间
******************************************************/
void Get_MotorA_Speed(void)
{
Read_EncoderA(); // 获取编码器产生的脉冲数
MotorASpeed = (float)EncoderA / 4 / PulseNum / ReRate / DecodeGapTime * 1000;
}
到了这里,关于stm32f103单片机—编码器测速的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!